




1. Запишите основное уравнение динамики материальной точки.
2. Приведите дифференциальные уравнения движения материальной точки в векторной и координатной формах, в проекциях на естественные оси.
3. Сформулируйте две основные задачи динамики материальной точки.
4. Что называют механической системой?
5. Какие силы называются «внешними» и «внутренними»?
6. Как определяется положение центра масс механической системы?
7. Запишите теорему о движении центра масс механической системы.
8. Чему равно количество движения: а) материальной точки, б) механической системы, в) твердого тела?
9. Что такое импульс силы?
10. В чем состоит теорема об изменении количества движения: а) материальной точки, б) механической системы?
11. Когда справедлив закон сохранения количества движения механической системы?
12. Дайте определение момента инерции тела относительно оси.
13. Чему равен момент количества движения материальной точки относительно центра или оси?
14. Чему равен кинетический момент механической системы относительно неподвижного центра и неподвижной оси?
15. Как найти кинетический момент твердого тела относительно оси его вращения?
16. В чем состоит теорема об изменении момента количества движения материальной точки относительно неподвижного центра и оси?
17. Запишите теорему об изменении кинетического момента механической системы относительно неподвижного центра и оси.
18. Приведите дифференциальное уравнение вращения тела вокруг неподвижной оси.
19. Чему равна кинетическая энергия: а) материальной точки, б) механической системы?
20. Запишите формулы для определения кинетической энергии тела: а) при поступательном, б) вращательном, в) плоскопараллельном движении.
21. Как найти работу постоянной силы на конечном перемещении?
22. Как найти работу переменной силы на криволинейном перемещении точки ее приложения?
23. Чему равна работа: а) силы тяжести, б) силы упругости?
24. Как найти работу силы, приложенной к телу, вращающемуся вокруг неподвижной оси?
25. Чему равна мощность силы?
26. В чем состоит теорема об изменении кинетической энергии: а) для материальной точки, б) для механической системы?
27. Что такое сила инерции материальной точки?
28. Чему равен главный вектор (главный момент) сил инерции твер- дого тела?
29. В чем состоит принцип Даламбера для материальной точки и для механической системы?
30. Как классифицируют связи?
31. Назовите отличия возможных перемещений от действительных.
32. Дайте определение обобщенных координат механической системы.
33. Как определить число степеней свободы механической системы?
34. Как определить обобщенную силу? Какова ее размерность?
35. Дайте определение и приведите примеры идеальных связей.
36. Сформулируйте принцип возможных перемещений.
37. Как на основе принципа возможных перемещений найти реакции связей уравновешенного твердого тела?
38. Запишите общее уравнение динамики.
39. Какие уравнения называют уравнениями Лагранжа второго рода?
40. В каких переменных должна быть выражена кинетическая энергия механической системы при составлении уравнений Лагранжа?
Методические
Указания
Каждая контрольная работа выполняется в отдельной тетради, страницы которой нумеруются. На обложке указываются: название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет, специальность и адрес. На первой странице тетради записываются: номер контрольной работы, номера решаемых задач и методические указания, откуда они взяты.
Решение каждой задачи обязательно начинать на развороте тетради (на четной странице, начиная со второй, иначе работу трудно проверять). Сверху указывается номер задачи, далее делается рисунок (можно карандашом), записываются исходные данные и задание (текст задачи не переписывать).
К каждой задаче дается 10 рисунков и таблица (с тем же номером, что и задача), содержащая дополнительные к тексту задачи условия. Нумерация рисунков двойная, при этом номером рисунка является цифра, стоящая после точки. Например, рис. С1.4 – это рис. 4 к задаче С1 и т.д. Номера условий от 0 до 9 проставлены в 1-м столбце (или в 1-й строке) таблицы.
Студент во всех задачах выбирает номер условия в таблице по предпоследней цифре шифра, а номер рисунка – по последней; например, если шифр оканчивается числом 46, то необходимо взять условия 4 из таблицы и рис. 6.
Рисунок выполняется с учетом условий решаемого варианта задачи; все углы, действующие силы, число тел и их расположение на рисунке должны соответствовать этим условиям. В результате в целом ряде задач рисунок получится более простой, чем общий.
Рисунок должен быть аккуратным и наглядным, а его размеры должны позволять показать все необходимые векторы – силы, скорости, ускорения и др. Решение задач необходимо сопровождать краткими пояснениями (какие формулы или теоремы применяются, откуда получаются те или иные результаты и т.п.), следует подробно излагать весь ход расчетов, обязательно указывая единицы измерения получаемых величин. На каждой странице нужно оставлять поля для замечаний рецензента.
ЗАДАЧИ
К КОНТРОЛЬНЫМ РАБОТАМ
СТАТИКА
З а д а ч а С1
Условия равновесия произвольной
плоской системы сил
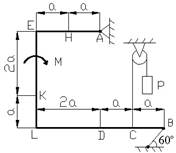
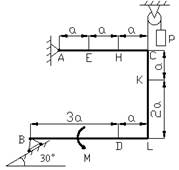
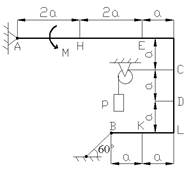
Жесткая рама закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню с шарнирами или к шарнирной опоре на катках (рис. С1.0–С1.9).

| 
|
| Рис. С1.0 | Рис. С1.1 |

| 
|
| Рис. С1.2 | Рис. С1.3 |
В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом Р = 25 кН. На раму действуют пара сил

| 
|
| Рис. С1.4 | Рис. С1.5 |

| 
|
| Рис. С1.6 | Рис. С1.7 |
| 
|
| Рис. С1.8 | Рис. С1.9 |
с моментом М = 60 кНм и две силы, величины направления и точки приложения которых указаны в табл. C1. В последнем столбце табл. С1 указан участок, на котором действует равномерно распределенная нагрузка интенсивности q. Направление действия распределенной нагрузки на горизонтальном участке – вниз, на вертикальном – влево.
Т а б л и ц а С1
| Номер усло-вия | Силы | Распределенная нагрузка q = 10 кН/м | |||||||
| F1 = 10 кН | F2= 20 кН | F3 = 30 кН | F4 = 40 кН | ||||||

| 
| 
| 
| 
| |||||
| Точка приложения | a1 | Точка прило-жения | a2 | Точка прило-жения | a3 | Точка прило-жения | a4 | Участок приложения q | |
| H | – | – | – | – | K | KL | |||
| – | – | D | E | – | – | LC | |||
| K | – | – | – | – | E | KL | |||
| – | – | K | H | – | – | LC | |||
| D | – | – | – | – | E | KL | |||
| – | – | H | – | – | D | LC | |||
| E | – | – | K | – | – | KL | |||
| – | – | D | – | – | H | LC | |||
| H | – | – | D | – | – | KL | |||
| – | – | E | K | – | – | LC |
Определить реакции связей в точках А и В, вызываемые действующими нагрузками. При окончательных расчетах принять а = 0,5 м.
Указания. При решении задачи С1 следует учесть, что натяжения обеих ветвей нити, перекинутой через блок, будут одинаковыми, когда трением пренебрегают. Уравнение моментов будет более простым (содержать меньше неизвестных), если составлять уравнение моментов относительно точки, где пересекаются линии действия двух реакций связей. При вычислении момента вектора силы  часто удобно разложить ее на составляющие
часто удобно разложить ее на составляющие  и
и  , для которых плечи легко определяются, и воспользоваться теоремой Вариньона, тогда m0() = m0() + m0().
, для которых плечи легко определяются, и воспользоваться теоремой Вариньона, тогда m0() = m0() + m0().
Пример решения задачи С1. Жесткая рама ABCD (рис. С1) имеет в точке А неподвижную шарнирную опору и в точке D – подвижную шарнирную опору (на катках). Действующие нагрузки и размеры показаны на рис. С1. В точке Е к раме прикреплен трос с подвешенным грузом, вес которого P. На раму действуют сила F, пара сил с моментом M и равномерно распределенная нагрузка интенсивности q (рис. С1).

Рис. С1
Д а н о: F = 30 кН, P = 25 кН, M = 40 кН.м, q = 10 кН/м, a = 60°, g = 45, b = 30°, l = 0,5 м. а = 0,5 м.
О п р е д е л и т ь: реакции опор в точках А и D, вызываемые действующими нагрузками.
 Р е ш е н и е
Р е ш е н и е
Рассмотрим равновесие рамы. Проведем координатные оси ху и покажем действующие на раму нагрузки: силу , пару сил с моментом М, натяжение троса  (по модулю Т = Р) и реакции связей
(по модулю Т = Р) и реакции связей  ,
,  ,
,  (реакцию неподвижной шарнирной опоры А изображаем двумя её составляющими, реакция шарнирной опоры D на катках направлена перпендикулярно опорной плоскости). Равномерно распределенную нагрузку заменим равнодействующей сосредоточенной силой Q = q·2 l = = 10·2· 0,5 = 10 кН, вектор которой приложен к середине отрезка АЕ (точка L) и направлен в сторону действия нагрузки.
(реакцию неподвижной шарнирной опоры А изображаем двумя её составляющими, реакция шарнирной опоры D на катках направлена перпендикулярно опорной плоскости). Равномерно распределенную нагрузку заменим равнодействующей сосредоточенной силой Q = q·2 l = = 10·2· 0,5 = 10 кН, вектор которой приложен к середине отрезка АЕ (точка L) и направлен в сторону действия нагрузки.
Для полученной плоской системы произвольных сил составим уравнения равновесия. При вычислении момента силы относительно точки А разложим её на составляющие  = F cosa и
= F cosa и  = F sin a:
= F sin a:
åFkx = 0, XA + RD sin b – F cos a – T sin g + Q = 0;
åFky = 0, YA + RD cos b – F sin a + T cos g = 0;
åmA( k) = 0, –M + RD cos b 2 l + F cos a 3 l – F sin a 2 l +
k) = 0, –M + RD cos b 2 l + F cos a 3 l – F sin a 2 l +
+ T sin g 2 l – Q l = 0.
Подставив в составленные уравнения числовые значения всех заданных величин и решив затем эти уравнения, найдём искомые реакции связей: XA = 4,89 кН; YA = –22,5 кН; RD = 35,57 кН.
Выполним проверку правильности решения задачи. Составим уравнение моментов относительно точки D:
åmD( k) = 0, –M +F cos a 3 l – T cos g 2 l + T sing 2 l – Q l – YA 2 l =
= –40 + 30× 0,5 ×3× 0,5 – 25× 0,707×2 × 0,5 +
+ 25× 0,707 ×2 × 0,5– 10×0,5 – (–22,5)2 × 0,5 = 0.
Полученный результат говорит о том, что задача решена верно.
О т в е т: XA = 4,89 кН;
YA = –22,5 кН;
RD = 35,57 кН.
Знак «минус» перед величиной YA означает, что эта сила имеет направление, обратное указанному на рис. С1.
З а д а ч а С2
Условия равновесия пространственной системы
произвольных сил
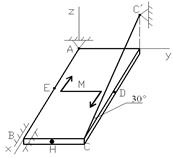
Однородная прямоугольная плита весом Р = 3 кН со сторонами АВ = 3 l, ВС = 2 l закреплена в точке А сферическим шарниром, а в точке Вцилиндрическим шарниром (подшипником) и удерживается в равновесии невесомым стержнем СС' (С2.0–С2.9).

| 
|
| Рис. С2.0 | Рис. С2.1 |
На плиту действуют две силы и пара сил, лежащая в плоскости плиты, с моментом М = 5 кН×м. Величины сил, их направления и точки приложения указаны в табл. C2; при этом силы  и
и  лежат в плоскостях,
лежат в плоскостях,

| 
|
| Рис. С2.2 | Рис. С2.3 |

|

|
| Рис. С2.4 | Рис. С2.5 |

| 
|
| Рис. С2.6 | Рис. С2.7 |
параллельных плоскости xy, сила  – в плоскости, параллельной xz, и сила
– в плоскости, параллельной xz, и сила  – в плоскости, параллельной yz. Точки приложения сил (D, E, H) находятся в серединах соответствующих сторон плиты. Определить реакции связей в точках А, В, С. При расчетах принять l = 0,8 м.
– в плоскости, параллельной yz. Точки приложения сил (D, E, H) находятся в серединах соответствующих сторон плиты. Определить реакции связей в точках А, В, С. При расчетах принять l = 0,8 м.

|

|
| Рис. С2.8 | Рис. С2.9 |
Т а б л и ц а С2
| Номер условия | Силы | |||||||
| F1 = 4 кН | F2 = 6 кН | F3 = 8 кН | F4 = 10 кН | |||||
 y
a1
x y
a1
x 
| z
a2
 x
x
| z
y
a3

| y
a4
 x x
| |||||
| Точка прило-жения | a1, град | Точка прило-жения | a2, град | Точка прило-жения | a3, град | Точка прило-жения | a4, град | |
| D | – | – | E | – | – | |||
| H | D | – | – | – | – | |||
| – | – | E | – | – | D | |||
| – | – | – | – | E | H | |||
| E | – | – | H | – | – | |||
| – | – | D | H | – | – | |||
| – | – | H | – | – | D | |||
| E | H | – | – | – | – | |||
| – | – | – | – | D | E | |||
| – | – | E | D | – | – |
Указания. При решении задачи С2 следует учесть, что реакция сферического шарнира имеет три составляющие, а реакции цилиндрического шарнира (подшипника) – две составляющие, лежащие в плоскости, перпендикулярной оси шарнира. При вычислении моментов силы удобно разложить ее на составляющие и , параллельные координатным осям, тогда по теореме Вариньона mх() = mx() + mx() и т.д.
Пример решения задачи С2. Вертикальная прямоугольная плита весом Р (рис. С2) закреплена в точке А сферическим шарниром, в точке В цилиндрическим шарниром (подшипником) и невесомым стержнем Д  , лежащим в плоскости, параллельной плоскости yz. На плиту действуют сила (в плоскости yz), сила
, лежащим в плоскости, параллельной плоскости yz. На плиту действуют сила (в плоскости yz), сила  (параллельная оси x) и пара сил с моментом М (лежащим в плоскости плиты).
(параллельная оси x) и пара сил с моментом М (лежащим в плоскости плиты).
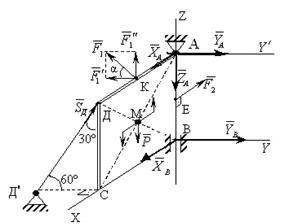
Рис. C2
Д а н о: P = 5 кH; M = 3 кHм; F1 = 6 кH; F2 = 7,5 кH; a = 30°; AB = 1 м; BC = 2 м; ВE = АЕ; АK = КД.
О п р е д е л и т ь: реакции опор А, В и стержня Д .
Р е ш е н и е
Рассмотрим равновесие плиты. На нее действуют заданные силы Р, F1, F2 и пара сил с моментом М, а также реакции связей. Реакцию сферического шарнира разложим на три составляющие  цилиндрического шарнира (подшипника) – на две составляющие
цилиндрического шарнира (подшипника) – на две составляющие  (в плоскости, перпендикулярной оси подшипника), реакцию стержня
(в плоскости, перпендикулярной оси подшипника), реакцию стержня  направим вдоль стержня, предполагая, что он сжат.
направим вдоль стержня, предполагая, что он сжат.
Для действующей на плиту пространственной системы произвольно расположенных сил составляем уравнения равновесия:
åFkX = 0, XA + XB – F2 = 0;
åFkY = 0, YA + YB – F1 cos a + SД sin 30° = 0;
åFkZ = 0, –ZA + SД cos 30° + F1 sin a – P = 0;
åmX( ) = 0, –SД sin 30°× AB + F1 cos a ×AB – YA ×AB = 0;
) = 0, –SД sin 30°× AB + F1 cos a ×AB – YA ×AB = 0;
åmY() = 0, –SД cos 30°×BC – F1 sina  + XA×AB –
+ XA×AB –
– F2  + M = 0;
+ M = 0;
åmZ() = 0, SД sin 30° ×BC – F1 cos a  = 0.
= 0.
Для определения момента силы  относительно оси Y разложим вектор на составляющие
относительно оси Y разложим вектор на составляющие  , параллельные осям Y и Z,
, параллельные осям Y и Z,  = F1 cos a,
= F1 cos a,  = F1 sin a и применим теорему Вариньона (см. указания). Аналогично можно поступить при определении моментов реакции
= F1 sin a и применим теорему Вариньона (см. указания). Аналогично можно поступить при определении моментов реакции  .
.
Подставив в составленные уравнения числовые значения всех заданных величин и решив затем эти уравнения, найдём, чему равны искомые реакции связей.
О т в е т: XA = 7,8 кH; YA = 2,6 кH; ZA = 2,5 кH; YB = 0 кH; XB = –0,3 кH; SД = 5,2 кH.
Знак «минус» указывает на то, что сила  направлена противоположно силе, показанной на рис.С2.
направлена противоположно силе, показанной на рис.С2.
Для проверки правильности решения задачи можно составить дополнительное уравнение суммы моментов относительно любой другой оси (например, для оси Y'), которое должно быть равно нулю.
КИНЕМАТИКА
З а д а ч а К1
Кинематика точки
Движение точки в плоскости xy задано уравнениями x = f1(t), y = f2(t), где x и y – в метрах, t – в секундах (табл. К1, К1а). Найти и изобразить траекторию точки (линию, которую точка описывает при своем движении, считая, что движение начинается в момент времени t = 0). Определить скорость и ускорение точки, а также ее касательное и нормальное ускорения в момент времени t = 1 с и радиус кривизны в соответствующей точке в этот же момент времени.
Т а б л и ц а К1
| Предпоследняя цифра шифра | Уравнение движения точки x = f1(t) | Примечания |
| 4 cos (πt/6) | y = f2(t) для вариантов от 00 до 29 (две последние цифры шифра) взять из столбца 2 табл. К1а | |
| 2 – 4cos (πt/6) | ||
| 2 cos (πt/6) – 3 | ||
| 4 – 2t | у = f2(t) для вариантов от 30 до 69 (две последние цифры шифра) взять из столбца 3 табл. К1а | |
| 2 – t | ||
| 2 t | ||
| t – 4 | ||
| 8sin (πt/6) – 2 | y = f2(t) для вариантов от от 70 до 99 (две последние цифры шифра) взять из столбца 4 табл. К1а | |
| 2 sin (πt/6) | ||
| 2 – 4sin (πt/6) |
Т а б л и ц а К1а
| Последняя цифра шифра | Уравнение движения точки y = f2 (t) | ||
| Для вариантов от 00 до 29 | Для вариантов от 30 до 69 | Для вариантов от 70 до 99 | |
| 12 sin (πt/6) | 2 t² + 2 | 4 cos (πt/6) – 2 | |
| 4 – 6 cos (πt/3) | 8 sin(πt/4) | 14 – 16cos (πt/6) | |
| –3 sin² (πt/6) | (2 + t)² | 4 cos (πt/3) | |
| 9 sin (πt/6) – 4 | 2 t³ | –10 cos (πt/6) | |
| 4 cos (πt/3) – 2 | 2 + 2 cos(πt/4) | –4 cos (πt/6) | |
| –10 sin (πt/6) | 2 – 3t² | 8 – 12 cos (πt/3) | |
| 2 – 6 sin² (πt/6) | 2 – 2 sin(πt/4) | 2 cos (πt/6) | |
| 2 sin (πt/6) – 2 | (t + 1)³ | 2 – 8 cos (πt/3) | |
| 8 cos (πt/3) + 5 | 2 – t³ | 8 cos (πt/6) – 4 | |
| 3 – 8sin ( πt/6) | 4 cos(πt/4) | –8 cos (πt/3) |
Указания. Задача К1 решается с помощью формул, по которым определяется скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное и нормальное ускорения точки.
В данной задаче все искомые величины нужно определить только для момента времени t = 1с. В некоторых вариантах задачи при определении траектории или при последующих расчетах (для их упрощения) следует учесть знакомые из тригонометрии формулы:
cos 2α = 1 – 2sin2 α = 2cos2 α – 1;
sin 2α = 2sin α × cos α.
Пример решения задачи К1
Д а н о: У равнения движения точки в плоскости xy:
x = –2 cos  + 3; y = 3 sin – 1,
+ 3; y = 3 sin – 1,
где x, y – в метрах, t – в секундах.
О п р е д е л и т ь: уравнение траектории точки; найти скорость и ускорение точки для момента времени t = 1 с, а также касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории. Показать векторы скорости и ускорения этой точки.
Р е ш е н и е
Для определения уравнения траектории точки исключим из заданных уравнений движения время t. Из уравнений движения находим выражения соответствующих функций, возводим обе части уравнений в квадрат и складываем:
cos  ; sin ; sin  .
Получим .
Получим
 .
Это уравнение эллипса (рис. К1). Найдем на траектории положение точки М, определив ее координаты при t = 1 с:
xt=1c = –1,59 м;
yt=1c = 1,12 м (рис. К1).
Скорость точки найдем по ее проекциям на координатные оси: .
Это уравнение эллипса (рис. К1). Найдем на траектории положение точки М, определив ее координаты при t = 1 с:
xt=1c = –1,59 м;
yt=1c = 1,12 м (рис. К1).
Скорость точки найдем по ее проекциям на координатные оси:
| 
|
| Рис. К1 |
Vx =  ; Vy =
; Vy =  ; V =
; V =  ,
,
при t = 1 с
Vx = 1,11 м/c; Vy = 1,67 м/c;
V = 2,0 м/c.
Аналогично найдем ускорение точки и определим касательное и нормальное ускорения и радиус кривизны траектории:
 ;
;  ;
;
 ;
;  ;
;  ;
;  .
.
При t = 1 с
a x = 0,87 м/c2; a t = –0,6 м/c2;
a y = –1,30 м/c2; a n = 1,67 м/c2;
a = 1,57 м/c2; r = 2,38 м.
Покажем векторы скорости и ускорения для соответствующей точки М траектории (см. рис. К1).
О т в е т: V = 2,0 м/с; а = 1,57 м/с2; а t= –0,6 м/с2; а n = 1,68 м/с2;
r = 2,38 м.
З а д а ч а К2
Сложное движение точки
Пластина вращается вокруг неподвижной оси по закону j = j(t), заданному в табл. К2. Положительное направление отсчета угла j показано на рисунках дуговой стрелкой (рис. К2.0–К2.9).

| 
|
| Рис. К2.0 | Рис. К2.1 |
На рис К2.7, К2.8, К2.9 ось вращения пластины проходит через точку О1 перпендикулярно плоскости чертежа (пластина вращается в своей плоскости). На рис. К2.0, К2.2, К2.4, К2.5 ось вращения пластины вертикальна, а на рис. К2.1, К2.3, К2.6 – горизонтальна.

|

|
| Рис. К2.2 | Рис. К2.3 |

| 
|
| Рис. К2.4 | Рис. К2.5 |

| 
|
| Рис. К2.6 | Рис. К 2.7 |

| 
|
| Рис. К2.8 | Рис. К2.9 |
По пластине движется точка М согласно закону s = OM = s(t) (табл. К2). На всех рисунках точка М показана в положении, при котором s = ОМ положительно.
Т а б л и ц а К2
| Номер условия | Закон движения пластины j = j (t), рад | Размер R, м | Закон движения точки s = s(t), м |
| 4 (t2 – t) | 1,2 |  R (4t2 – 2t3) R (4t2 – 2t3)
| |
| 3t2 – 8t | 1,6 |  R (2t2 – t3) R (2t2 – t3)
| |
| 6t3 – 12t2 | 1,0 |  R (2t2 – 1) R (2t2 – 1)
| |
| t2 – 2t3 | 1,6 | R (2t4 – 3t2)
| |
| 10t2 – 5t3 | 0,8 | R (3t – t2)
| |
| 2(t2 – t) | 2,0 | R (t3 – 2t)
| |
| 5t – 4t2 | 1,2 | R (t3 – 2t2)
| |
| 15t – 3t3 | 0,8 | R (t – 2t2)
| |
| 2t3 – 4t | 1,0 | R (3t2 – 2t)
| |
| 6t2 – 3t3 | 2,0 | R (t – 2t2)
|
Найти абсолютную скорость и абсолютное ускорение точки М в момент времени t = 1с.
Указания. При решении задачи К2 следует движение точки по пластине считать относительным, вращательное движение самой пластины – переносным и воспользоваться теоремами о сложении скоростей и о сложении ускорений.
Прежде всего необходимо определить, где в момент времени t = 1 c будет находиться точка М, и изобразить ее именно в этом положении (а не в произвольном, показанном на рисунке к задаче). В случаях, когда точка М движется по дуге радиуса R, положение точки М определяется углом ОСМ.
Пример решения задачи К2. Пластина (рис. К2) вращается вокруг горизонтальной оси по закону j = j(t). Положительное направление отсчета угла φ показано на рис. К2 дуговой стрелкой. По дуге АОД движется точка М согласно закону s = ОM = s(t); положительное направление отсчета расстояния s – от О к Д.
Д а н о: R = 0,5 м; φ = 2t2; s = ОМ = pR  (φ – в радианах, s – в метрах, t – в секундах).
(φ – в радианах, s – в метрах, t – в секундах).
О п р е д е л и т ь: абсолютную скорость Va и абсолютное ускорение a a точки М в момент времени t = 1 с.

Рис. К2
Р е ш е н и е
Точка М совершает сложное движение. При этом ее движение по дуге является относительным, а движение вместе с пластиной – переносным.
Рассмотрим относительное движение. Это движение происходит по закону
 s = ОМ = pR . (1)
s = ОМ = pR . (1)
Сначала установим, где будет находиться точка М на дуге AОД в момент времени t = 1с. Подставляя в уравнение (1) t = 1 с, получим  . Тогда
. Тогда  . Изображаем на рис. К2 точку в положении, соответствующем этому углу.
. Изображаем на рис. К2 точку в положении, соответствующем этому углу.
Определим значения скорости и ускорения:

 , (2)
, (2)
где rот = R – радиус кривизны траектории при относительном движении точки. Для момента времени t = 1 c, учитывая, что R = 0,5 м, получим
 ;
;  м/с2;
м/с2;  м/с2. (3)
м/с2. (3)
Положительные значения Vот и  показывают, что вектор
показывают, что вектор  направлен по касательной в сторону положительного отсчета s, а вектор
направлен по касательной в сторону положительного отсчета s, а вектор  так же, как вектор . Вектор
так же, как вектор . Вектор  направлен к центру С вдоль радиуса. Покажем эти векторы на рис. К2.
направлен к центру С вдоль радиуса. Покажем эти векторы на рис. К2.
Рассмотрим переносное движение точки. Движение пластины (вращение) происходит по закону φ = 2t2. Найдем угловую скорость ω и угловое ускорение ε переносного вращения:
ω =  = 4t; ε =
= 4t; ε =  = 4.
= 4.
При t = 1 с
ω = 4 с-1; ε = 4 с-2. (4)
Положительные значения указывают на то, что направления ω и ε совпадают с направлением φ (см. рис. К2).
Для определения Vпер и а пер найдем сначала радиус вращения точки М:
KB = h = 2R – R×cos 30° = 0,57 м.
Тогда в момент времени t = 1с, учитывая равенства (4), получим
Vпер = ω × h = 4 × 0,57 = 2,28 м/с;
a врпер = ε × h = 4 × 0,57 = 2,28 м/с2; (5)
a цпер = ω2 × h = 42 × 0,57 = 9,12 м/с2.
Изобразим на рис. К2 вектор скорости  пер с учетом направления ω и векторы ускорений:
пер с учетом направления ω и векторы ускорений:  (направлен по радиусу к оси вращения),
(направлен по радиусу к оси вращения),  (направлен так же, как пер).
(направлен так же, как пер).
Ускорение Кориолиса
а кор = 2 | Vот |· |ω | · sin α,
где α – угол между вектором и вектором  , который направлен вдоль оси вращения, как показано на рис. К2, α = 30о.
, который направлен вдоль оси вращения, как показано на рис. К2, α = 30о.
Тогда согласно равенствам (3) и (4) в момент времени t = 1 с
 кор = 2 | Vот | · | ω | sin 30о = 2 · π/4 · 4 · 1/2 = 3,14 м/с2. (6)
кор = 2 | Vот | · | ω | sin 30о = 2 · π/4 · 4 · 1/2 = 3,14 м/с2. (6)
Направление вектора  кор найдем, спроецировав вектор от на плоскость вращения, и повернув эту проекцию на 900 по ходу вращения пластины (см. рис. К2).
кор найдем, спроецировав вектор от на плоскость вращения, и повернув эту проекцию на 900 по ходу вращения пластины (см. рис. К2).
Рассмотрим абсолютное движение точки. Определим абсолютную скорость. Так как а = от + пер, а векторы от и пер взаимно перпендикулярны (см. рис. К2), то в момент времени t = 1 с
Vа=  =
=  = 2,4 м/с.
= 2,4 м/с.
Определим абсолютное ускорение. По теореме о сложении ускорений
а =  . (7)
. (7)
Проведем координатные оси Мxyz (рис. К2) и, проецируя обе части равенства (7) на координатные оси, вычислим проекции векто- ра а на эти оси. Учтем при этом, что векторы  ,
,  лежат на оси х, а векторы
лежат на оси х, а векторы  расположены в плоскости Мyz.
расположены в плоскости Мyz.
Учтя одновременно равенства (3), (5), (6), получим для момента времени t = 1 с
а а x = а кор + а  = 5,42 м/с2;
= 5,42 м/с2;
а а y = – а  соs 60° + а
соs 60° + а  соs 30° = 0,74 м/с2;
соs 30° = 0,74 м/с2;
а а z = - а соs 60° – а соs 30° + а  = 7,27 м/с2.
= 7,27 м/с2.
Тогда
а а =  = 9,1 м/с2.
= 9,1 м/с2.
О т в е т: Vа = 2,4 м/с; а а = 9,1 м/с2.
З а д а ч а к3
Исследование плоскопараллельного движения
твердого тела
Плоский механизм состоит из стержней 1, 2, 3, 4 и катка с центром С, соединенных между собой шарнирами. На рис. К3.3 и К3.8 стержень 3 шарнирно соединен с ползунами В и Е. На рис. К3.3–К3.8 шарнир D находится в середине соответствующего стержня.
Длины стержней равны соответственно: l 1 = 0,2 м; l 2 = 1,0 м; l 3 = 1,2 м; l 4 = 0,8 м. Радиус катка R = 0,3 м.
Положение механизма определяется углами j1, j2, j3, j4 (рис. К3.0–К3.9). Значения этих углов и скорости звеньев указаны в табл. К3, причем угловая скорость стержня 1 w1 и скорость центра катка VC – величины постоянные.

| 
| |
| Рис. К3.0 | Рис. К3.1 | |

|

| |
| Рис. К3.2 | Рис. К3.3 | |
Определить линейные скорости точек V и угловые скорости звеньев ω, указанные в столбце «Найти» табл. К3.
Построение чертежа следует начинать со стержня, направление которого определяется углом φ1. Дуговыми стрелками на рисунках показано, как откладывать соответствующие углы при построении чертежа механизма

| 
| |
| Рис. К3.4 | Рис. К3.5 | |

| 
| |
| Рис. К3.6 | Рис. К3.7 | |

| 
| |
| Рис. К3.8 | Рис. К3.9 | |
Т а б л и ц а К3
| Номер условия | Углы, град | Заданные скорости | Найти | |||||
| φ1 | φ 2 | φ 3 | φ 4 | ω1, с-1 | VC, м/с | V точек | ω звеньев | |
| – – – – – | – – – – – | В, А С, В В, А С, В В, А С, В В, А С, В В, А С, В | 2 и 3 2 и 4 2 и 3 2 и 4 2 и 3 2 и 4 2 и 3 2 и 4 2 и 3 2 и 4 |
Заданную угловую скорость w1 считать направленной против хода часовой стрелки, а заданную скорость VC – вправо.
Указания. При решении задачи К3 для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.
Пример решения задачи К3. Механизм (рис. К3) состоит из стержней 1, 2, 3, ползуна А и катка, соединенных друг с другом и с неподвижной опорой Е шарнирами.
Д а н о: j1 = 90º; j2 =150º; j3 = 240º; j4 = 150º; l 1 = 1,0 м; l 2 = 0,9 м; l 3 = 1,0 м; ВЕ = 2ДЕ; VC = 4 м/с.
О п р е д е л и т ь: скорости точек VA, VД и угловые скорости звеньев w1, w2.
Р е ш е н и е
Строим положение механизма в соответствии с заданными углами (рис. К3).
Определяем скорость точки Д – VД. Точка Д принадлежит стержню СД. Чтобы найти VД, надо знать скорость какой-нибудь другой точки этого стержня и направление вектора  . По данным задачи известны скорость центра катка VC = 4 м/c и направление вектора
. По данным задачи известны скорость центра катка VC = 4 м/c и направление вектора  – параллельно поверхности, по которой катится каток. Направление вектора найдем, учтя, что точка Д принадлежит еще и стержню ДВ, вращающемуся вокруг Е; следовательно, ^ ДВ. Теперь, зная направление векторов и , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня СД) на прямую, соединяющую эти точки. Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
– параллельно поверхности, по которой катится каток. Направление вектора найдем, учтя, что точка Д принадлежит еще и стержню ДВ, вращающемуся вокруг Е; следовательно, ^ ДВ. Теперь, зная направление векторов и , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня СД) на прямую, соединяющую эти точки. Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
VC соs 30° = VД; VД = VC соs 30° = 4  = 3,5 м/c.
= 3,5 м/c.

Рис. К3
Определяем скорость точки А – VA. Точка A принадлежит стержню АВ. Следовательно, надо сначала найти скорость точки В, принадлежащей одновременно стержню ВД. Так как стержень ВД вращается вокруг Е, то вектор  ^ ВД и направлен в сторону поворота стержня. Величину скорости VB найдем из пропорции
^ ВД и направлен в сторону поворота стержня. Величину скорости VB найдем из пропорции
 .
.
Так как ВЕ = 2ДЕ, следовательно,
 = 2VД = 2×3,5 = 7 м/c.
= 2VД = 2×3,5 = 7 м/c.
Поскольку точка А принадлежит одновременно ползуну, движущемуся поступательно вдоль направляющих, то линия действия  известна. Тогда, зная направление векторов
известна. Тогда, зная направление векторов  и , построим мгновенный центр скоростей (МЦС) стержня АВ; это точка Р1, лежащая на пересечении перпендикуляров к векторам и , восстановленных из точек В и А. По направлению вектора определяем направление поворота стержня АВ вокруг МЦС. Вектор будет направлен в сторону поворота стержня АВ. Учитывая, что
и , построим мгновенный центр скоростей (МЦС) стержня АВ; это точка Р1, лежащая на пересечении перпендикуляров к векторам и , восстановленных из точек В и А. По направлению вектора определяем направление поворота стержня АВ вокруг МЦС. Вектор будет направлен в сторону поворота стержня АВ. Учитывая, что
VB = ω1·ВР1; VА = ω1·АР1,
получим
 .
.
Вычислим ВР1 и АР1. Треугольник АР1В – прямоугольный, так как острые углы в нем равны 30º и 60º, и тогда
 м;
м;
BP1 = AР1 sin 30º = 1,2×0,5 = 0,6 м.
В результате  м/c.
м/c.
Определяем величину угловой скорости стержня АВ w1:
 .
.
Определяем величину угловой скорости стержня ВД w2:
 .
.
О т в е т: VA = 14,0 м/c; VД = 3,5 м/c; w1 = 11,7 c-1; w2 = 7,8 c-1.
ДИНАМИКА
З а д а ч а Д1
Дифференциальные уравнения движения
материальной точки
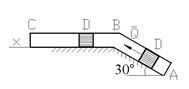
Тело D, имеющее массу m, получив в точке А начальную скорость V0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости (рис. Д1.0–Д1.9).

| 
|
| Рис. Д1.0 | Рис. Д1.1 |

| 
|
| Рис. Д1.2 | Рис. Д1.3 |

| 
|
| Рис. Д1.4 | Рис. Д1.5 |

| 
|
| Рис. Д1.6 | Рис. Д1.7 |

| 
|
| Рис. Д1.8 | Рис. Д1.9 |
На участке АВ на тело, кроме силы тяжести, действуют постоянная сила  , направленная вдоль трубы, и сила трения. В точке В тело, не изменяя величины своей скорости, переходит на участок ВС и движется, скользя по трубе. При этом на тело, кроме силы тяжести, действуют силы трения и переменная сила
, направленная вдоль трубы, и сила трения. В точке В тело, не изменяя величины своей скорости, переходит на участок ВС и движется, скользя по трубе. При этом на тело, кроме силы тяжести, действуют силы трения и переменная сила  , величина проекции которой Fx на ось х задана в табл. Д1. Там же приведены величины m, V0, Q, расстояние между точками А и В (l = АВ) или tАВ – время движения тела от точки А до точки В и коэффициент трения f тела о трубу.
, величина проекции которой Fx на ось х задана в табл. Д1. Там же приведены величины m, V0, Q, расстояние между точками А и В (l = АВ) или tАВ – время движения тела от точки А до точки В и коэффициент трения f тела о трубу.
Т а б л и ц а Д1
| Номер условия | m, кг | V0, м/с | Q, H | f | l, м | τАВ, c | Fx, H | Найти |
| 2,4 | 0,2 | 1,5 | – | 4 sin (4t) | V1 | |||
| 0,4 | – | 2,5 | –5 cos (4t) | x1 | ||||
| 0,3 | – | 6t | V1 | |||||
| 1,8 | 0,3 | – | –2 cos (2t) | x1 | ||||
| 0,2 | – | –5 sin (2t) | V1 | |||||
| 4,5 | 0,3 | – | 3t | x1 | ||||
| 0,1 | 2,5 | – | 6 cos (4t) | V1 | ||||
| 1,6 | 0,4 | – | –3 sin (4t) | x1 | ||||
| 4,8 | 0,2 | – | 4 cos (2t) | V1 | ||||
| 0,3 | – | 4 sin (2t) | x1 |
Считая тело материальной точкой, необходимо определить закон движения х = (t) на участке ВС.
Указания. Решение задачи Д1 разбивается н

