




Процесс математического моделирования, то есть изучения явления с помощью М. м., можно подразделить на 4 этапа.
Первый этап - формулирование законов, связывающих основные объекты модели. Этот этап требует широкого знания фактов, относящихся к изучаемым явлениям, и глубокого проникновения в их взаимосвязи. Эта стадия завершается записью в математических терминах сформулированных качеств, представлений о связях между объектами модели.
Второй этап - исследование математических задач, к которым приводят М. м. Основным вопросом здесь является решение прямой задачи, то есть получение в результате анализа модели выходных данных (теоретических следствий) для дальнейшего их сопоставления с результатами наблюдений изучаемых явлений. На этом этапе важную роль приобретают математический аппарат, необходимый для анализа М. м., и вычислительная техника - мощное средство для получения количеств, выходной информации как результата решения сложных математических задач. Часто математические задачи, возникающие на основе М. м. различных явлений, бывают одинаковыми (например, основная задача линейного программированияотражает ситуации различной природы). Это даёт основание рассматривать такие типичные математические задачи как самостоятельный объект, абстрагируясь от изучаемых явлений.
Третий этап - выяснение того, удовлетворяет ли принятая гипотетическая модель критерию практики, то есть выяснение вопроса о том, согласуются ли результаты наблюдений с теоретическими следствиями модели в пределах точности наблюдений. Если модель была вполне определена - все параметры её были заданы, - то определение уклонений теоретических следствий от наблюдений даёт решения прямой задачи с последующей оценкой уклонений. Если уклонения выходят за пределы точности наблюдений, то модель не может быть принята. Часто при построении модели некоторые её характеристики остаются не определёнными. Задачи, в которых определяются характеристики модели (параметрические, функциональные) таким образом, чтобы выходная информация была сопоставима в пределах точности наблюдений с результатами наблюдений изучаемых явлений, называются обратными задачами. Если М. м. такова, что ни при каком выборе характеристик этим условиям нельзя удовлетворить, то модель непригодна для исследования рассматриваемых явлений. Применение критерия практики к оценке М. м. позволяет делать вывод о правильности положений, лежащих в основе подлежащей изучению (гипотетической) модели. Этот метод является единственным методом изучения недоступных нам непосредственно явлений макро- и микромира.
Четвёртый этап - последующий анализ модели в связи с накоплением данных об изучаемых явлениях и модернизация модели. В процессе развития науки и техники данные об изучаемых явлениях всё более и более уточняются и наступает момент, когда выводы, получаемые на основании существующей М. м., не соответствуют нашим знаниям о явлении. Т. о., возникает необходимость построения новой, более совершенной М. м.
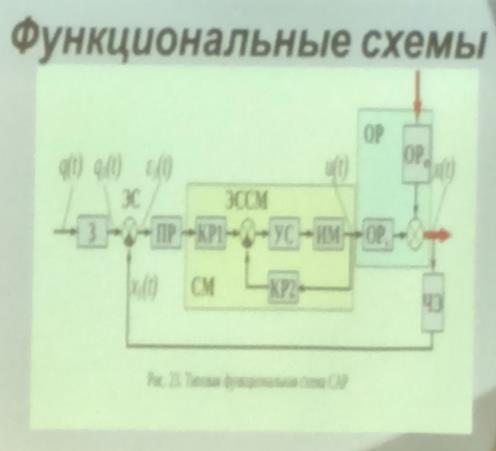
21. Функциональная схема управления на примере САР.
22. Понятие сигнал. Классификация сигналов по физическому носителю информации.
Понятие сигнала
Сигнал — символ (знак, код), созданный и переданный в пространство (по каналу связи) одной системой, либо возникший в процессе взаимодействия нескольких систем. Смысл и значение сигнала проявляются в процессе дешифровки его второй (принимающей) системой.
Сигнал — материальный носитель информации, используемый для передачи сообщений в системе связи. Сигнал может генерироваться, но его приём не обязателен, в отличие от сообщения, которое рассчитано на принятие принимающей стороной, иначе оно не является сообщением. Сигналом может быть любой физический процесс, параметры которого изменяются (или находятся) в соответствии с передаваемым сообщением.
Сигнал, детерминированный или случайный, описывают математической моделью, функцией, характеризующей изменение параметров сигнала.
Понятие сигнал позволяет абстрагироваться от конкретной физической величины, например тока, напряжения, акустической волны и рассматривать вне физического контекста явления связанные кодированием информации и извлечением её из сигналов, которые обычно искажены шумами. В исследованиях сигнал часто представляется функцией времени, параметры которой могут нести нужную информацию. Способ записи этой функции, а также способ записи мешающих шумов называют математической моделью сигнала.
Обобщенная структура системы цифровой обработки сигналов
Цифровая обработка связана с представлением любого сигнала в виде последовательности чисел. Это означает, что исходный аналоговый сигнал должен быть преобразован в исходную последовательность чисел, которая вычислителем по заданному алгоритму преобразуется в новую последовательность, однозначно соответствующей исходной. Из полученной новой последовательности формируется результирующий аналоговый сигнал.Обобщенная структура системы цифровой обработки сигналов приведена на рисунке ниже.

На ее вход поступает аналоговый сигнал от разнообразных датчиков, которые преобразуют физическую величину в электрическое напряжение. Его временная дискретизация и квантование по уровню производятся в аналого-цифровом преобразователе (АЦП). Выходным сигналом АЦП является последовательность чисел, поступающая в цифровой процессор ЦП, выполняющий требуемую обработку. Процессор осуществляет различные математические операции над входными отсчетами. Как правило, цифровой процессор включает в себя добавочную аппаратуру:
· матричный умножитель;
· дополнительное АЛУ для аппаратной поддержки формирования адресов операндов;
· дополнительные внутренние шины для параллельного доступа к памяти;
· аппаратный сдвигатель для масштабирования, умножения или деления на 2n.
Результатом работы процессора является новая последовательность чисел, представляющих собой отсчеты выходного сигнала. Аналоговый выходной сигнал восстанавливается по последовательности чисел с помощью цифро-аналогового преобразователя ЦАП. Напряжение на выходе ЦАП имеет ступенчатую форму. При необходимости можно использовать сглаживающий фильтр на выходе.
Классификация сигналов
По физической природе носителя информации:
· электрические;
· электромагнитные;
· оптические;
· акустические
23. САР. Классификация САР
Система автоматического регулирования (САР) осуществляет автоматическое поддержание заданного значения контролируемого параметра технологического процесса или его изменение по заданному закону. Эту систему можно рассматривать как совокупность микросистемы контроля и микросистемы управления, работающих только с одним параметром. Часто такое совмещение может быть достаточно просто реализовано технически, что и привело к широкому распространению САР.
Пример системы автоматического регулирования температуры — электрический утюг. Повернув ручку установки температуры в положение, соответствующее типу ткани, вы задаете температуру, которую система регулирования автоматически поддерживает в течение всего времени глажения. Аналогичная система может использоваться для поддержания заданной температуры жидкости в резервуарах и трубопроводе, хотя практическая реализация ее в производственных условиях немного иная.
Пример системы автоматического регулирования уровня жидкости — устройство наполнения смывного бачка в туалете. Как только уровень воды в бачке понижается, открывается клапан, и бачок заполняется водой; после достижения требуемого уровня клапан закрывается. Аналогичная система может использоваться и для регулирования уровня жидкости в резервуарах в производственных условиях.
Особенностью САР является ее полная автономность: как бы ни развивались события в технологическом процессе, контролируемый системой параметр будет всегда иметь заданное значение или изменяться по заданному закону (в последнем случае система будет более сложной). Практически при автоматизации технологических процессов используются комбинированные автоматические системы, включающие в себя системы всех трех рассмотренных типов. Основными параметрами технологических процессов являются температура, давление, уровень, масса, объем, расход, качество, состав и другие электрические и неэлектрические величины. Для контроля величин этих параметров необходимо вести измерения непрерывно. Результаты измерений сравниваются с требуемыми значениями контролируемого параметра, а если имеются отклонения, то подается сигнал об отклонении. Отклонения могут быть положительными или отрицательными, уменьшения или повышения и так далее. По отклонениям принимается решение и подается сигнал на объект управления. В процессе принятия решения могут участвовать человек-оператор или управляющее
устройство.
Под управлением понимают такую организацию процесса, которая обеспечивает
заданный характер протекания процесса. При этом сам процесс (совокупность
технических средств - машин, орудий труда, т.е. исполнителей конкретного процесса) с
точки зрения управления является объектом управления (ОУ), а переменные,
характеризующие состояние процесса, называются управляемыми переменными или
управляемыми величинами.
Автоматическое управление (регулирование) - это осуществление какого-либо
процесса без непосредственного участия человека, с помощью соответствующих систем
автоматики. Если автоматическое управление призвано обеспечить изменение
(поддержание) управляемой величины по заданному закону, то такое автоматическое
управление называют автоматическим регулированием. Технические устройства,
выполняющие операции управления (регулирования), называются автоматическими
устройствами. Совокупность средств управления объектов образует систему управления.
Систему, в которой все рабочие и управляющие операции выполняют автоматические
устройства, называют автоматической системой.
Условно систему автоматического управления (САУ) можно разделить на две части:
регулятор и объект управления (ОУ) (рисунок 4.1).
Рисунок 4.1 - Функциональная схема САУ
Объектами управления могут быть технологические установки, отдельные
параметры технологического процесса, различные двигатели и т.д. Воздействия,
прикладываемые к регулятору для обеспечения требуемых значений управляемых
величин, являются управляющими воздействиями. Управляющие воздействия называют
также входными величинами, а управляемые - выходными величинами. Таким образом,
всякий технологический процесс характеризуется совокупностью физических величин,
называемых показателями или параметрами процесса. Величины, характеризующие
состояния объекта управления, схематически можно показать следующим образом
(рисунок 4.2).
Рассмотрим приведенные определения и понятия на конкретном примере, в качестве
которого возьмем систему регулирования частоты вращения электродвигателя
постоянного тока (рисунок 4.3). Здесь ОУ является электродвигатель M,
характеризуемый частотой вращения w. Изменение величины w достигается изменением
напряжения Я U, подводимого к якорю электродвигателя. Очевидно, что величина Я U и
величина w будут максимальными, если ползунок m потенциометрического реостата П
окажется в крайнем нижнем положении. При перемещении ползунка m в крайнее верхнее
положение UЯ = 0 и соответственно w = 0. Таким образам, перемещая ползунок m от
крайнего нижнего положения в крайнее верхнее, можно изменять частоту вращения w от
максимального значения до нуля. Для удобства контроля частоты вращения с валом
электродвигателя связан вал тахогенератора BR- электрического генератора,
преобразующего величину w в напряжение BR BR U = K w. Вольтметр PV, включенный на
напряжение тахогенератора BR U, градуируется в единицах измерения частоты вращения
(рад/с) или скорости вращения вала электродвигателя (мин-1).
Представленная на рисунке 4.3 а система регулирования является разомкнутой, а
регулирование в ней осуществляется по разомкнутому циклу. Разомкнутая система ха-
рактеризуется тем, что изменения регулируемой величины не передаются на вход системы
и не изменяют значения регулирующей (управляющей) величины. Регулирование в
разомкнутой системе осуществляется с участием человека-оператора (Оп), который,
наблюдая за значением регулируемой величины по регистрирующему прибору,
устанавливает такое значение регулирующей величины, которое необходимо для
обеспечения заданного режима работы системы. Таким образом, в рассмотренной разом-
кнутой системе осуществляется ручное, неавтоматическое регулирование.
Виды и классификация САР
1) по виду регулируемого параметра:
САР уровня, САР давления, САР температуры
2) по вид регулируемой величины у и во времени:
а) система стабилизации – у всегда постоянно и равно заданному значению.
б) система программы – у регулируется в соответствии с заданием программы, которая изменяется в зависимости от независимой переменной (время, пространство) и граничные аварийные условия
3) по поведению регулирующей величины х во времени:
А) дискретные системы – прерывисто изменяются во времени
Б) аналоговые системы – плавно изменяются во времени
4) По взаимосвязи и их количеству:
 - Одномерная система
- Одномерная система
 - Многомерная система
- Многомерная система
1. а) симметричное – количество входов равно количеству выходов
б) подчиненное (критическое)
2. с вязанное и несвязанное – внутри объекта параметры воздействуют и невоздействуют друг на дуга.
3. связанное и автономное – по зависимости управления параметрами (двух параметров с помощью одного)
4. стационарное и нестационарное y=g(x), y=ax
5) По поведению величины и по давлению:
1) система стабилизации – когда параметр поддерживается на данном значении втечении всего времени.
2) система регулирования – обеспечивает поддержание параметра в соответствии с заданием, которое изменяется в зависимости от независимой переменной.
Существуют 3 независимые переменные:
а) время – можно только измерить
б) пространство
в) независимые аварийные или неординарные условия.
3) следящая – предполагает поддержание первого параметра в измененном режиме в зависимости от изменения другого параметра.
Расходы песка регулируются в зависимости от расхода цемента и наоборот.
Виды: 1) симметричные – оба параметра главные.
2) корректирующие – когда первый параметр регулируется, а второй только контролируется.
6) По характерам устойчивости системы:
Различают 3 типа состояния системы по устойчивости:
7) По степени организации:
а) локальная система – стабилизирует один параметр
б) программная система – регулирует изменяющийся параметр
в) следящая система – стабилизирует несколько параметров для стабилизации одного.
В зависимости от соотношения параметров следящая система может быть:
а) симметричная – оба параметра главные
б) подчиненная – один параметр главный, дугой зависимости от него (связь второго отсутствует)
в) оптимальная система – стабилизирует не параметр, а критерий по экономической эффективности или количеству.
г) самоорганизующая система – позволяет в процессе управления подключать или отключать автоматические блоки.
д) самонастраивающаяся система – при включении сами ищут оптимальный режим и запоминают его.
е) самообучающаяся система – система, в процессе управления анализируя состояние, находит оптимальные условия.
ж) интелектная система – производит поиск режимов управления не предусмотренных программой настройки.
з) корректирующая – регулирует один параметр в зависимости от первого (связь третьего отсутствует)
и) адаптивная – регулирует параметры объекта правления по заданном критерию экономичности или качества, регулирует среднее значение по нескольким параметрам
24.Объект как система. Четыре системообразующих свойства объекта как системы.

