




Кинематика токарно-винторезного станка 16К20
Цель работы: Ознакомиться с условными обозначениями элементов кинематических цепей станка; изучить кинематику токарно-винторезного станка;
Общие сведения
Принцип работы различных машин, в том числе и станков, нагляднее изучать по схеме, а не по их конструктивному изображению. Условное, схематическое изображение совокупности механизмов и устройств станка называется кинематической схемой. Изображения элементов кинематических схем. стандартизованы. Основные из них приведены в прил.1.
Кинематическая схема станка состоит из отдельных кинематических цепей, представляющих собой систему последовательно расположенных звеньев. Под звеном подразумевается деталь механизма, входящая в соприкосновение с другой деталью (зубчатое колесо, винт, гайка, червяк, червячное колесо и т.п.).
Механизм, передающий или преобразующий движение от одного звена к другому, называется кинематической парой или передачей.
В станках применяются передачи вращательного движения (ременные, цепные, зубчатые, червячные и др.) и преобразующие вращательное движение в поступательное (реечные, винтовые и ДР-)-
Основным кинематическим параметром передачи вращательного движения является передаточное отношение, которое показывает, во сколько раз больше (меньше) частота вращения одного вала по сравнение с другим. Передаточное отношение определяется зависимостью
i = п2/п1
где п2 и п1 — частоты вращения ведущего и ведомого валов соответственно.
Передаточные отношения различных передач выражаются следующим образом
Ременная передача
i=n2/n1=d1/d2η,
где d1 и d2 — диаметры ведущего и ведомого шкивов; η = 0,94- 0,98 — коэффициент, учитывающий проскальзывание ремня относительно поверхности шкивов.
Цепная передача
i = п2/п1 = zl/z2,
где z1 и z2 — числа зубьев ведущей и ведомой звездочек.
Зубчатая передача
i = п2/п1 = zl/z2,
где z1 и z2 — числа зубьев ведущего и ведомого зубчатых колес
Червячная передача
i = n2/n1 = z1/z2,
где z1 — число заходов червяка, z2 — число зубьев червячного колеса.
Для передач, преобразующих движение, устанавливается кинематическая связь между вращательным движением одного звена с поступательным движением второго.
Если реечное зубчатое колесо имеет г зубьев, а модуль реечного колеса и рейки равен т, то за n оборотов зубчатого колеса рейка переместится на величину L, равную
L = πdn = πmzn мм, где d — диаметр делительной окружности зубчатого колеса, мм.
В винтовой передаче за п оборотов винта гайка переместится в осевом направлении на величину L:
L = Р·п мм,
где Р — шаг винта.
В сложных механизмах движение от начального звена к конечному передается несколькими последовательно соединенными передачами, т.е. кинематической цепью.
Общее передаточное отношение кинематической пени вращательного движения определяется произведением передаточных отношений отдельных передач, входящих в данную цепь и равно отношению частот вращения конечных звеньев, т.е.
iобщ = i1· i2· i3· i4… in = п кон / п кач
Данное уравнение позволяет определить частоту вращения не только последнего звена, но и любого промежуточного, считая его последним.
Кинематические цепи могут состоять не только из передач вращательного движения, но и передач, преобразующих один вид движения в другой.
Математическая зависимость, связывающая движения конечных звеньев кинематической цепи, называется уравнением кинематического баланса.
В металлорежущих станках кинематическим цепям присваивают названия в зависимости от выполняемых ими функций. Так, кинематическую цепь, передавшую движение от электродвигателя к шпинделю станка, называют кинематической цепью
главного движения. Соответственно, цепи шпиндель-суппорт называют кинематическими цепями подачи, которые в свою очередь подразделяют на цепь продольной и цепь поперечной подач. Токарно-винторезный станок 16К20 имеет также цепь ускоренных перемещений суппорта и кинематическую цепь для нарезания резьб.
Начальным звеном цепи главного движения (рис.5.17) является электродвигатель мощностью 11 кВт и частотой вращения п = 1460 об/мин, конечным — шпиндель.
Уравнение кинематического баланса цепи главного движения в общем виде можно записать, как

где пшп — частота вращения шпинделя, об/мин; пэ. д. — частота вращения электродвигателя, об/мин; D1 и D2 — диаметры ведущего и ведомого шкивов клиноременной передачи, мм; η =0,98 — коэффициент проскальзывания ремня; і к.с. — общее передаточное отношение коробки скоростей.
Общее уравнение кинематического баланса цепи главного движения имеет вид:

к шпинделю 12 скоростей,
 к шпинделю напрямую 12 скоростей.
к шпинделю напрямую 12 скоростей.
В вертикальных столбцах записаны передаточные отношения возможных вариантов включения подвижных блоков шестерен.
При включении муфты M1 влево (прямом включении), шпиндель получает двенадцать различных частот вращения напрямую и столько же через перебор.
Возможные передаточные отношения перебора при этом будут:

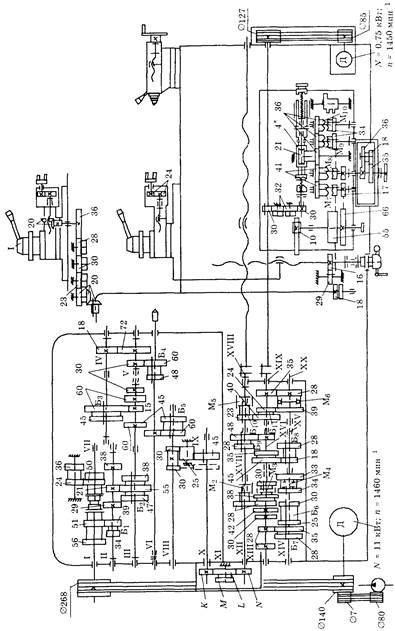
Рис.5.17. Кинематическая схема токарно-винторезного станка 16К20
Таким образом, теоретически шпиндель имеет 24 частоты вращения. Однако, ввиду повторяемости частот 500 мин- 1, 630 мин-1, их общее количество сокращается до 22.
Вращательное движение шпинделя и перемещение суппорта связаны зависимостью (расчетные перемещения)

реверс
где т, z — модуль и число зубьев реечной шестерни; реверс.
В общем виде уравнение кинематического баланса цепи продольных подач запишется:

где i г, i кп, i ф — передаточные отношения гитары сменных колес, коробки подач и фартука.
Табличные значения величин подач могут быть получены только при установке сменных шестерен
К/L·L/N= 40/ 86·86/64
.
Удвоенные табличные значения величин подач, шагов метрических и дюймовых резьб могут быть получены установкой сменных шестерен
К/L·L/N=60/86·86/48
Величина поперечных подач составляет 1/2 продольных.
Муфта обгона Мб позволяет сообщить суппорту ускоренное движение от отдельного электродвигателя мощностью N = 0,75 кВт без выключения рабочих подач.
Механизм фартука имеет четыре кулачковые муфты, которые предназначены для включения продольной (муфты М8 и М7)
и поперечной подач (муфты M10 и М9 в прямом и обратном направлениях.
Вопросы, связанные с настройкой станка на нарезание резьб, рассматриваются в лабораторной работе №23.
Пример. Составить уравнение кинематического баланса цепи главного движения для частоты вращения шпинделя 12,5 мин 1.
Решение. Уравнение кинематического баланса цепи главного движения имеет вид

Для составления уравнения баланса кинематических цепей следует воспользоваться графиком частот вращения шпинделя станка 16К20 (рис.5.18), На графике условно лучами показаны передаточные отношения передач коробки скоростей.
 Вертикальные линии — валы, на которых установлены шестерни. Если i = 1, то луч перпендикулярен линии вала (передача 38/38·45/45); если < 1
Вертикальные линии — валы, на которых установлены шестерни. Если i = 1, то луч перпендикулярен линии вала (передача 38/38·45/45); если < 1
38 45
(передача замедления), луч наклонен вниз на определенное количество интервалов, характеризующее величину передаточного отношения (передачи 29/47;21/55;15/60;18/72)
Наклон луча вверх свидетельствует о передаче ускорения, в этом случае i > 1 (передачи
56/34;51/39;60/48). Параллельные линии характеризуют одинаковые передаточные отношения. Например, при передаче 38/38 дважды переключался блок шестерен, обеспечивая зацепления 56/34 и 51/39. Отсюда на графике три пары параллельных лучей 38/38;29/47;21/55).
Рис.5,18. График частот вращения
шпинделя токарно-винторезного
Станка 16К20
Порядок проведения работы
• Ознакомиться с условными обозначениями элементов кинематической схемы станка.
• Пользуясь кинематической схемой станка, рассмотреть передачу движений по цепям главного движения, подач и ускоренного перемещения суппорта.
• Составить уравнения кинематического баланса названных кинематических цепей.
Составить уравнение кинематического баланса цепи главного движения в соответствии, с индивидуальным заданием (табл.5.17).
Методические указания по выполнению индивидуального задания
Таблица 5.17
Индивидуальное задание



