




Введение
Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
В наше время большое применение нашел частотно-регулируемый привод. Его используют в конвейерных системах, резательных автоматах, управлении приводами мешалок, насосов, вентиляторов, компрессоров и т.п. Всё большую популярность ЧРП приобретает в городском электротранспорте, особенно в троллейбусах. Применение позволяет: повысить точность регулирования и снизить расход электроэнергии в случае переменной нагрузки. Во многих установках на регулируемый электропривод возлагаются задачи не только плавного регулирования момента и скорости вращения электродвигателя, но и задачи замедления и торможения элементов установки. Классическим решением такой задачи является система привода с асинхронным двигателем с преобразователем частоты, оснащённым тормозным переключателем с тормозным резистором. При этом в режиме замедления/торможения электродвигатель работает как генератор, преобразуя механическую энергию в электрическую, которая в итоге рассеивается на тормозном резисторе. Типичными установками, в которых циклы разгона чередуются с циклами замедления являются подъёмники, лифты, центрифуги, намоточные машины и т.п.
В данном курсовом проекте необходимо спроектировать замкнутую систему автоматического управления электроприводом механизма поворота. В ходе работы будут разработаны структурная, функциональная и принципиальная схема замкнутой системы управления ПЧ-АД, расчет и выбор элементов схемы, произведено параметрирование выбранного ПЧ, выбор и расчет параметров регулятора скорости и статических механических характеристик, в пакете MatLab расчитаны динамические режимы работы ЭП.
Исходные данные
| Таблица 1 – Исходные данные курсовой работы | ||
| Параметр | Значение | |
| Количество скоростей | ||
| Способ задания скорости | Дискретный | |
| Устройство задания скорости | Коммандоаппарат | |
| Индикация режимов работы | Работа, Перегрузка | |
Диапазон регулирования скорости, 
| ||
Статическая ошибка регулирования скорости,  , % , %
|
| Таблица 2 – Технические характеристики двигателя двигателя 5АМX132S4 | ||
| Параметр | Значение | Ед. изм. |
| Номинальная мощность, Pн | 7.5 | кВт |
Номинальная частота вращения, 
| об/мин | |
КПД, 
| 87.5 | % |
| Номинальный ток при 380В, Iн | 15.3 | А |
| Номинальный момент, Мн | 49.4 | Нм |
| Отношение пускового момента к номинальному, mн | 2.1 | |
| Отношение критического момента к номинальному, mk | 2.8 | |
Динамический момент инерции ротора, 
| 0.032 | 
|
| Таблица 3 – Технические данные механизма поворота | ||
| Параметр | Значение | Ед. изм. |
| Jм =Jт | 0.022 | кг  м2 м2
|
| J1 | 0.01 | кг м2
|
| J2 | 0.04 | кг м2
|
| J3 | 0.016 | кг м2
|
| J4 | 0.033 | кг м2
|
| J5 | 0.17 | кг м2
|
| Jпл | кг м2
| |
| Z1 | - | |
| Z2 | - | |
| Z3 | - | |
| Z4 | - | |
| Z5 | - | |
| Zпл | - | |
| Cм | Н м 104
| |
| Сзш | Н м 105
| |
| nпл | Об/мин | |
| Мс | Н м
| |

| 0.8 | - |
| tп=tт | 0.3 | р |
| t01=t02 | 3.0 | c |

| гр | |
| Mс.о.=k Mc
| 0.7 | Н м
|
На рисунке 1 представлена кинематическая схема механизма поворота:
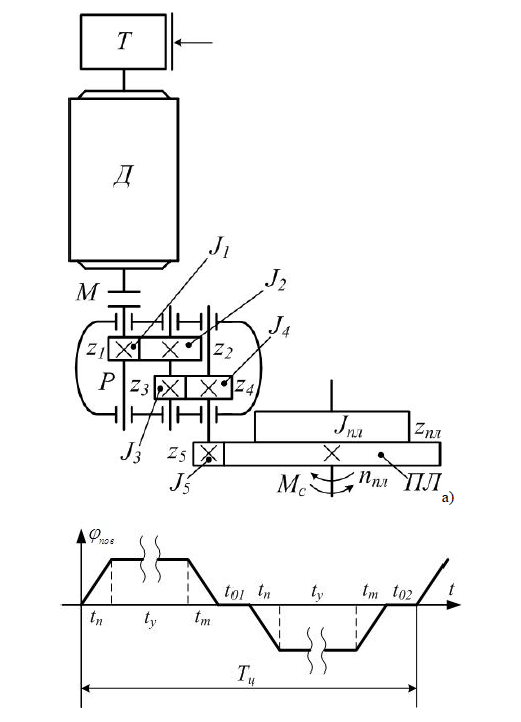
Рисунок 1 – Кинематическая схема механизма поворота.
На рисунке 2 представлена тахограмма и нагрузочные диаграммы:
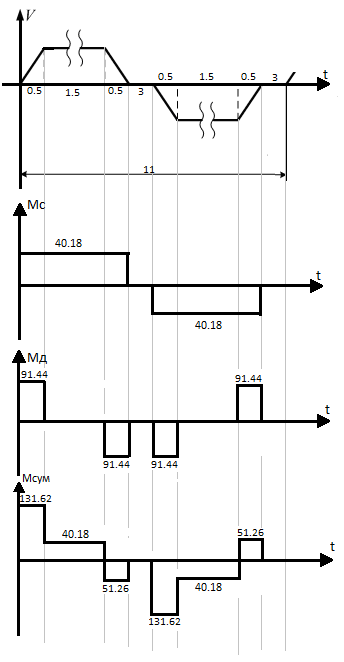
Рисунок 2 – Тахограмма и нагрузочные диаграммы.
Разработка структурной схемы системы управления ПЧ-АД
При работе АД на участке механической характеристики в пределах абсолютного скольжения  используют структурную схему:
используют структурную схему:

Рисунок 3 – Структурная схема замкнутой по скорости системы ПЧ-АД при скалярном управлении.
На структурной схеме приняты следующие обозначения:
 - модуль жесткости линеаризованной механической характеристики АД, где
- модуль жесткости линеаризованной механической характеристики АД, где  ,
,  – критический момент и скольжение;
– критический момент и скольжение;
 ;
;


 ;
;
 ;
;
 - эквивалентная электромагнитная постоянная времени цепей статора и ротора АД;
- эквивалентная электромагнитная постоянная времени цепей статора и ротора АД;
 ;
;
 - электромеханическая постоянная времени электропривода;
- электромеханическая постоянная времени электропривода;
 ;
;
 - коэффициент передачи ПЧ по
- коэффициент передачи ПЧ по  ;
;
 ;
;
 - постоянная времени цепи управления;
- постоянная времени цепи управления;
 ;
;
 - коэффициент передачи цепи обратной связи по скорости,
- коэффициент передачи цепи обратной связи по скорости,
где  - номинальная скорость;
- номинальная скорость;

 ;
;

