




Расчётно-экспериментальная работа № 8
Содержание
1. Краткие теоретические сведения
Назначение и принцип действиядвигателя.
Внешний вид и конструкциядвигателя.
Способы включения обмотки возбуждения
Основные характеристики двигателя.
2. Задание на расчет
3. Пример расчета двигателя
4. Контрольные вопросы
1. Краткие теоретические сведения
Назначение и принцип действиядвигателя. Двигатели постоянного тока до сих пор находят широкое применение, хотя они значительно дороже и менее надёжны, чем асинхронные и синхронные. Их широко используют в электротранспорте, для привода прокатных станов, металлорежущих станков и т. д. Двигатели небольшой мощности применяют во многих системах автоматики.
Преимущество ДПТ - возможность плавного и экономичного регулирования в широком диапазоне частоты вращения вала и создания большого пускового момента при относительно небольшом пусковом токе.
НедостатокДПТ- наличие щёточно-коллекторного аппарата, который требует тщательного ухода в эксплуатации и снижает надежность машины.
Принцип действия двигателя иллюстрирует рис.1. Основные части двигателя: статор и ротор, рис.1 а). Статор (неподвижная часть) представляет собой полый стальной цилиндр, на котором установлен постоянный магнит с северным полюсом N сверху и южным полюсом S снизу. Внутри статора на валу размещен ротор (вращающаяся часть). Он представляет собой сплошной стальной цилиндр с пазами, внутри которых размещены витки обмотки. Концы каждого витка оформлены в виде медных полосок коллектора, закрепленного на валу. К полоскам подводится с помощью медно-графитовых щеток ток I от внешнего источника напряжения U. При протекании тока I виток поворачивается вместе с ротором по часовой стрелке под действием сил Ампера.
Рис.1 б) иллюстрирует силы Ампера и связанное с ними правило левой руки: если магнитные силовые линии В входят в ладонь сверху, а четыре пальца руки показывают направление тока I в проводе, то большой палец покажет направление действия силы Ампера f на провод. Под действием вращающего момента, обусловленного силами Ампера, ротор на валу начинает вращаться, его вращение передается рабочему механизму РМ с помощью ленточной или шестеренчатой передачи.
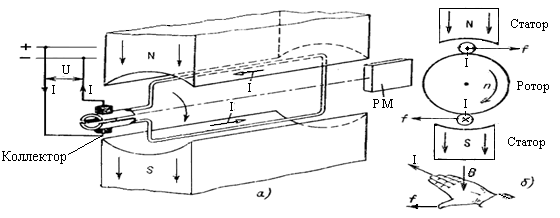
Рис.1. Принцип действия двигателя ПТ и правило левой руки
Конструкция и внешний вид двигателя. На рис. рис.2.а) показана конструкция двигателя (постоянный магнит заменен на электоромагнит), на рис. 2 б) – его внешний вид.
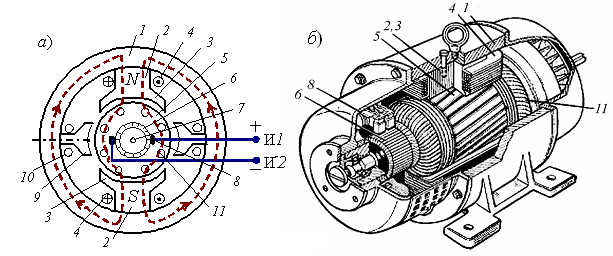
Рис. 2. Конструкция и внешний вид двигателя
Основными частями двигателя постоянного тока являются статор и якорь, отдалённые друг от друга воздушным зазором (0,3…0,5 мм), рис. 2, а).
Статор- э то стальной цилиндр 1, внутри которого крепятся главные полюса 2 с полюсными наконечниками 3, образуя вместе с корпусом магнитопровод машины. На главных полюсах расположены последовательно соединённые обмотки возбуждения 4 электромагнита, предназначенного для создания постоянного магнитного потока Фв машины. Концы И1 и И2 обмотки возбуждения (ОВ) выводят на клеммный щиток, расположенный на корпусе машины.
Помимо основных полюсов внутри статора располагают дополнительные полюса 9 с обмотками 10, которые служат для уменьшения искрения в скользящих контактах (между щётками и коллектором).
Ротор - это цилиндр 5, набранный из листов электротехнической стали, снаружи которого имеются пазы, в которые уложена обмотка 11, рис. 2.а). Отводы обмотки якоря припаивают к пластинам коллектора 6, расположенного на вращающемся в подшипниках валу 7.
Коллектор представляет собой цилиндр, набранный из медных пластин, изолированных друг от друга и от вала и закреплённых (по технологии "ласточкина хвоста") на стальной втулке.
Коллектор (в генераторном режиме) играет роль механического выпрямителя переменной ЭДС, индуктируемой в обмотке якоря.
К коллектору с помощью пружин прижимаются неподвижные медно-графитовые щётки 8, соединённые с клеммами Я1 и Я2 щитка. Образовавшиеся скользящие контакты дают возможность соединить вращающуюся обмотку якоря(ОЯ)с электрической цепью: снять выпрямленное напряжение с коллектора (генераторный режим) или соединить якорную обмотку с источником постоянного напряжения (двигательный режим)). Суммарное сопротивление цепи якоря Rя = 0,5…5 Ом.
Способы включения обмотки возбуждения. В зависимости от того, как обмотка возбуждения ОВ включена относительно сети и якоря, различают двигатели постоянного тока (ДПТ):
ДПТ независимого возбуждения, рис.3 а)
ДПТ с параллельного возбуждения рис.3 б),
ДПТ с последовательного возбуждения рис.3 в),
ДПТ с смешанного возбуждения рис.3 г).
На рис. 3 приведены электрические схемы возбуждения указанных типов ДПТ.
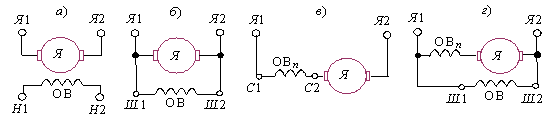
Рис.3. Способы включения обмотки возбуждения.
Основные параметры и характеристики двигателя.
Ос новными параметрами двигателя ПТ являются:
· n -частота вращения якоря, об/мин;
·  - угловая частота вращения якоря,
- угловая частота вращения якоря,  2
2  60, рад/c
60, рад/c
· М - средний электромагнитный момент (в Н×м), действующий на якорь ДПТ, по обмотке которого протекает ток Iя,  где Fс - среднее значение силы в ньютонах (Н), действующей на якорь, d - диаметр якоря, м.
где Fс - среднее значение силы в ньютонах (Н), действующей на якорь, d - диаметр якоря, м.
· Рмех = М – механическая мощность на валу,
· Р2 - полезная мощность на валу, передаваемая рабочей мащине, Р2= Рмех – Рпот ,, где Рпот,- потери мощности, связанные с разогревом двигателя и трением в подшипниках.
· η – коэффициент полезного действия, η = Р2/ Р1, где Р1-электрическая мощность, потребляемая от сети постоянного тока.
Основные характеристики двигателя:
Важнейшей характеристикой является механическая n (M), представляющая зависимость частоты вращения n ротора от развиваемого ДПТ момента вращения М при условии постоянства напряжения и сопротивлений в цепи якоря и в цепи возбуждения.
Зависимость М = f (Iя) называется моментной характеристикой двигателя. При установившемся режиме работы двигателя электромагнитный момент вращения М связан с током якоря Iя.
Характеристика коэффициента полезного действия h = ¦(Iя) нарастает очень быстро при росте нагрузки от нуля (режим холостого хода) до 0,5 Iян и достигает наибольшего значения в пределах от 0,5 до 0,8 номинальной нагрузки, а затем медленно падает вследствие роста потерь.
Электромеханические свойства ДПТ определяются его скоростной характеристикой n (Iя), представляющей зависимость частоты вращения n от тока якоря Iя при U = const и Iв = const.
Все основные характеристики представлены рис.4, где по осям приведены нормированные значения параметров, получаемые делением на эталон. В качестве эталона принято нормативное значение параметра.
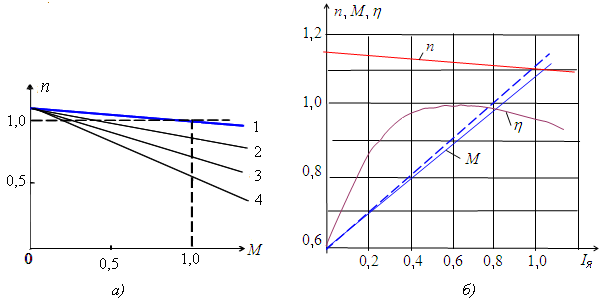
Рис.4. Механическая характеристика, рис.4 а), и рабочие характеристики, рис. 4 б), двигателя
2. Задание на расчет
Рассчитать электромеханические показатели рабочего режима двигателя:
А. Определить номинальный вращающий момент М= 𝖞 Рн /𝝎 (𝝎=2πn/60).
Б. Определить ток якоря Iя = Uн / Rя
В.Определить магнитный поток кФ= M / Iя , где к-конструктивный коэффициент
Г. Определить ток обмотки возбуждения I ов = Uовн / Rов
Д. Определить индуктивность обмотки возбуждения L ов= кФ/ I ов
Е. Определить проводимость механической нагрузки (коэффициент трения якоря) M / 𝝎 (𝝎=2πn/60)
Расчет вести по вариантам, исходя из следующих данных в таблице 1:
Таблица 1.Двигатели постоянного ток серии 2 ПН, длина сердечника якоря h=90 мм
| N | Рн, кВт | Uн, В | n об/мин | n max об/мин | 𝖞 % | Rя, Ом | Rдоп Ом | R ов, Ом | Lя, мГн |
| 0,17 | 47,5 | 5,84 | 4,40 | ||||||
| 48,5 | 27,2 | 16,2 | |||||||
| 0,25 | 3.99 | 2,55 | 78,7 | ||||||
| 15.47 | 11.2 | ||||||||
| 0,37 | 61,5 | 2,52 | 1,4 7 | ||||||
| 0.4 | 61,5 | 10,61 | 6,66 | ||||||
| 0,71 | 69,5 | 0,54 | |||||||
| 3,99 | 2,55 | ||||||||
| 71,5 | 0, 6 | 0,35 | |||||||
| 72,5 | 2,52 | 1.47 |
3. Пример расчета
Зададимся данными для расчета согласно таблице ниже
| Рн, кВт | Uн, В | n об/мин | n max об/мин | 𝖞 % | Rя, Ом | Rдоп Ом | R ов, Ом | Lя, мГн |
| 0,17 |
Проводим расчет:
А. Определяем номинальный вращающий момент М= 𝖞 Рн /𝝎 (𝝎=2πn/60).
𝝎=2πn/60=78,5 рад/с М= 𝖞 Рн /𝝎 =0,5  170/78/5=1,08 Н
170/78/5=1,08 Н  м.
м.
Б. Определим ток якоря Iя = Uн / Rя=120/10=12 A
В.Определим магнитный поток кФ= M / Iя = 1,08 / 12=0,09, где к - конструктивный коэффициент
Г. Определить ток обмотки возбуждения I ов = Uовн / Rов=120/160=0,75 А
Д. Определим индуктивность обмотки возбуждения. Произведение к L ов определим из условияк L ов=  =
=  =0,12
=0,12
Примем к =0,03, тогда L ов= 0,12/ 0.03=4 Гн
Е. Определим проводимость механической нагрузки (в качестве неё примем коэффициент трения вала якоря): M / 𝝎= 1,08/78,5=0,014 Н м  /рад
/рад
Расчет окончен
Для проверки соберем в программе EWB схему испытания двигателя постоянного тока согласно рис. 5. Электронная модель двигателя представлена двумя центральными элементами схемы: первый элемент определяет обмотку возбуждения, второй – ротор двигателя. Их можно найти в поле компонентов программы, щелкнув по пиктограмме М.
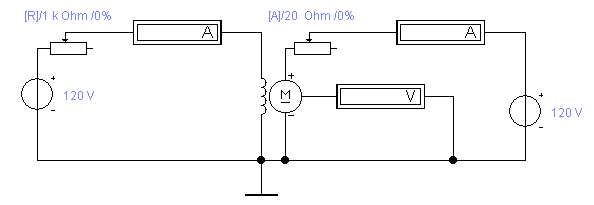
Рис. 5. Схема испытания двигателя постоянного тока в программе EWB
Щелкнув двойным щелчком мышки по изображению двигателя и используя команду Edit, можнооткрыть его диалоговое окно, показанное на рис. 6.
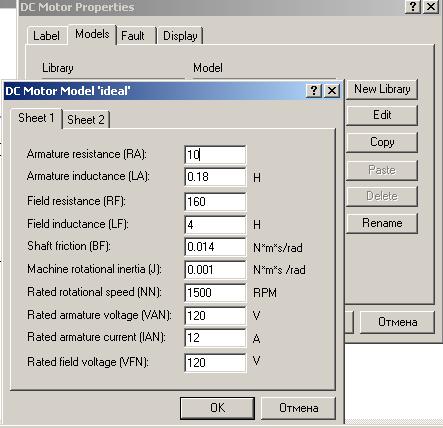
Рис. 6 Диалоговое окно двигателя постоянного тока в программе EWB
В этом окне используются поля:
Ra – Сопротивление ротора в Омах, Ω
La- Индуктивность ротора в Генри,Гн
Rf - Сопротивление полевой обмотки в Омах, Ω
Lf - Индуктивность полевой обмотки в генри,Гн
Bf - Трение вала в Н•м•с/рад, N m*s/rad
J - Инерция вращения машины в Н•м•с2/рад, N*m*s2/rad
nn- Номинальная скорость вращения, в оборотах в минуту, PRM
Van - Номинальная напряжение ротора в Вольтах,V
Ian- Номинальный ток ротора в Aмперах, А
Vfn - Номинальная напряжение на полевой обмотке в Вольтах,V
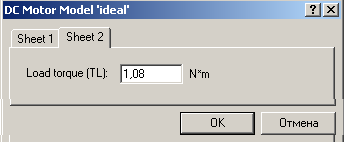
Следует установить в открывшемся окне Sheet 1 электромеханические показатели рабочего режима двигателя, рассчитанные ранее. Затем следует открыть последнее окно Sheet 2 и в установить значение вращающего момента вращающий момент М в N*m.
При запуске схемы в работу будем иметь показания приборов, показанные на рис.7.
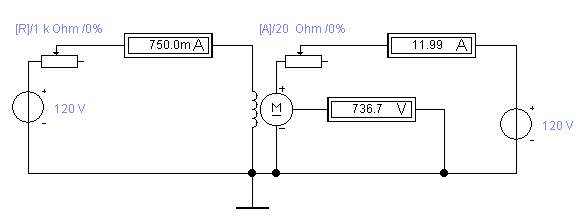
Рис. 7. Экспериментальное испытание двигателя, собранного в соответствии с расчетом.
Показания вольтметра определяют на скорость вращения n, выраженную в об/мин.
Из рисунка видно, что показания приборов в основном подтверждают расчет. При желании, можно снять механическую и рабочие характеристики двигателя, работая с реостатами R и А схемы. Значения вращающего момента будут определяться по показаниям амперметров условием: М= 0,12  .
.
Для облегчения понимания механических параметров в Приложении 1 приведем электромеханические аналогии.
Приложение 1. Электромеханические аналогии
| Электрический аналог | Механический аналог |
| Ток, [I]=А. | Вращающий момент, [M]= Н*м. |
| Напряжение, [U]=В. | Угловая скорость вращения, [𝝎]=рад/c |
| Мощность, [U* I]=Вт. | Мощность на валу, [М*𝝎]=Вт. |
| Проводимость, [G]= Cм. | Коэффициент трения вала [В=М/ 𝝎]= Н* м*с/рад |
| Емкость, [С]= Ф. | Инерция вращения ротора, [J] = Н*м*с2/рад |
4. Контрольные вопросы
1. Укажите, как осуществить реверс (обратное вращение) ДПТ параллельного возбуждения?
А. Изменить полярность напряжения, подводимого к цепи якоря.
Б. Одновременно изменить полярность напряжения, подводимого к цепи якоря и к цепи возбуждения.
В. Изменить направление тока в обмотке возбуждения.
Г. Сместить положение щеток с геометрической нейтрали ДПТ.
2. Укажите, как изменяется вращающий момент ДПТ с изменением питающего напряжения U?
А. Момент ДПТ не зависит от колебаний напряжения U сети.
Б. Момент ДПТ изменяется пропорционально изменению напряжения U.
В. Момент ДПТ изменяется пропорционально изменению напряжения U 2.
Г. Момент ДПТ изменится пропорционально корню квадратному из U.
3. Укажите, как изменится частота вращения ротора ДПТ двигателя при увеличении тока возбуждения?
А. Увеличится. Б. Не изменится. В. Уменьшится.
4. Укажите, с какой целью последовательно с цепью якоря ДПТ включают сериесную обмотку возбуждения?
А. Для уменьшения пускового тока двигателя.
Б. Для уменьшения искрения в скользящих контактах коллектор-щётки.
В. Для получения большей жесткости механической характеристики ДПТ.
Г. Для ослабления реакции якоря.
5. Укажите, при каком коэффициенте нагрузки b = P 2/ P 2 н КПД ДПТ будет максимальным?
А. При b = 0. Б. При b = 1. В. При b = 0,2 …0,3. Г. При b = 0,7…0,8.

