




Однією з основних умов працездатності АСР являється її стійкість, тобто здатність системи повертатися у вихідний стан після зняття впливу, який вивів її з цього стану.
Необхідною і достатньою умовою стійкості системи є негативність дійсної частини комплексних коренів характеристичного рівняння. Характеристичне рівняння одержують звичайно, дорівнюючи до нуля диференціальний оператор при вихідній величині у вихідному диференціальному рівнянні.
Обчислення коренів дуже просто лише для характеристичного рівняння першого і другого ступеня. Існують загальні вирази для коренів рівнянь третього і четвертого ступеня, але ці вирази громіздкі і практично не застосовуються. Для рівнянь більш високих ступенів взагалі неможливо написати загальні вирази для коренів через коефіцієнти характеристичного рівняння.
Існують правила, що дозволяють визначати стійкість системи без обчислення коренів. Ці правила називають критеріями стійкості. Ними і пропонується скористатися при рішенні задач [1-3, 9].
ЗАВДАННЯ №3.
Розрахунок і аналіз АСР з використанням моделювання на ПЕОМ
За наданими параметрами об'єкта регулювання і структурі регулятора (табл. 2.7), необхідно розрахувати його параметри, що забезпечують задані показники якості. Структурна схема АСР наведена на рис. 2.3.

|
| Рис. 2.3. Структурна схема АСР |
На цій схемі: g(t) – завдання; z(t) – збурювання, що приведене до входу об'єкта; e(t) – неузгодженість; y(t) – вихідна (регульована) змінна; u(t) = u1(t) + u2(t) + u3(t) – керуючий вплив.
Відомі числові значення параметрів системи й діючих сигналів наведені в табл. 2.7.
Необхідно виконати наступне.
1. Здійснити аналіз об'єкта регулювання.
2. Визначити числові значення невідомих параметрів регулятора (відзначених *), які забезпечують компенсацію «великої» постійної часу і задане перерегулювання s.
3. Визначити стале значення зазначеного сигналу при дії на входах постійних сигналів g0 и z0.
4. Розрахувати статичне відхилення (статичну помилку).
Залежність перерегулювання s від коефіцієнта демпфірування x в системі другого порядку представлено у табличному вигляді (табл. 2.6).
Таблиця 2.6
Залежність перерегулювання від коефіцієнта демпфірування
в системі другого порядку
| x | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,0 |
| s, % | 1,5 | 0,3 |
Таблиця 2.7
Варіанти завдань
| Вар. | k | Т1, с | Т2, с | koc | k1 | k2 | k3 | g0 | z0 | u1уст | u2уст | u3уст | yуст | s, % |
| 0,5 | 0,1 | * | * | * | - | - | * | |||||||
| 1,0 | 0,4 | * | * | * | - | - | * | |||||||
| 0,5 | * | * | - | - | * | |||||||||
| 0,4 | 0,5 | * | * | - | * | - | * | |||||||
| 0,4 | 0,5 | * | * | - | * | - | * | |||||||
| 0,5 | 0,1 | * | * | * | - | - | * | |||||||
| 1,2 | 0,4 | * | * | * | - | - | * | |||||||
| 0,6 | * | * | - | - | * | |||||||||
| 0,5 | 0,7 | * | * | - | * | - | * | |||||||
| 0,1 | 0,05 | 0,5 | * | * | - | * | - | * | ||||||
| 0,4 | 0,08 | * | * | * | - | * | - | |||||||
| 0,5 | * | * | * | - | * | - | ||||||||
| 0,2 | 0,08 | * | * | * | - | - | * | |||||||
| * | * | * | - | - | * | |||||||||
| 0,5 | 0,1 | * | - | * | - | * | ||||||||
| 0,5 | * | * | * | - | - | * | ||||||||
| 1,0 | 0,4 | * | * | * | - | - | * | |||||||
| 0,3 | 0,3 | * | * | - | * | - | * | |||||||
| 0,3 | 0,15 | * | * | - | - | * | * | |||||||
| 0,8 | * | * | - | - | * | |||||||||
| 0,2 | 0,07 | 0,5 | * | * | - | * | - | * | ||||||
| 1,5 | 0,6 | * | * | * | - | - | * | |||||||
| * | * | * | - | - | * | |||||||||
| 0,6 | * | * | - | - | * | * | ||||||||
| 0,9 | 0,2 | * | * | * | - | - | * | |||||||
| 0,4 | * | * | - | - | * | |||||||||
| 0,3 | 0,4 | * | * | - | * | - | * | |||||||
| 1,3 | 0,4 | * | * | * | - | - | * | |||||||
| 0,2 | 0,8 | * | * | - | * | - | * | |||||||
| 0,5 | 0,06 | * | * | * | - | - | * | |||||||
| 0,25 | 0,75 | * | * | * | - | * | - | |||||||
| 0,3 | 0,2 | * | - | * | - | * | ||||||||
| 1,0 | 0,5 | * | * | * | - | - | * | |||||||
| 0,5 | * | * | - | - | * | |||||||||
| 0,3 | * | * | - | - | * | |||||||||
| 0,15 | 0,03 | 0,5 | * | * | - | * | - | * |
ЗАВДАННЯ №4.
Розрахунок параметрів автоколивань в нелінійній системі
В завданні пропонується розрахувати параметри автоколивань у нелінійній системі (НС) на прикладі системи, що слідкує, з нелінійним елементом (НЕ) типу двопозиційного реле (характеристика якого наведена на рис. 2.4) і з лінійною частиною (ЛЧ), заданою функцією передачі
 ,
,
де К – коефіцієнт передачі; Т – постійна часу.
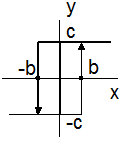
Рис. 2.4. Характеристика НЕ
Значення параметрів наведені в табл. 2.8.
Таблиця 2.8
| № варіанта | Параметри НС | № варіанта | Параметри НС | ||||||
| Т, с | К | b | c | Т, с | К | b | c | ||
| 0,1 | 1,0 | ||||||||
| 0,2 | 0,1 | ||||||||
| 0,5 | 0,3 | ||||||||
| 1,0 | 0,5 | 1,5 | |||||||
| 0,8 | 0,8 | 0,7 | |||||||
| 0,1 | 1,0 | 0,5 | |||||||
| 0,2 | 0,2 | ||||||||
| 0,3 | 0,4 | ||||||||
| 0,5 | 0,2 | ||||||||
| 0,7 | 0,7 | ||||||||
| 0,9 | 0,8 | ||||||||
| 1,0 | 1,0 | ||||||||
| 0,1 | 0,5 | 1,5 | |||||||
| 0,2 | 0,3 | ||||||||
| 0,3 | 1,5 | 0,1 | |||||||
| 0,4 | 1,0 | ||||||||
| 0,5 | 0,1 | ||||||||
| 0,8 | 0,1 |

