




ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Тетрадь для лабораторных работ
Студента______________________________________________
(Ф.И.О., курс, факультет, группа)
Самара
Самарский государственный технический университет
Протокол
Лабораторная работа №1
Структурный анализ плоских механизмов
С низшими кинематическими парами
Цель работы: ознакомление со структурой (строением) механизма, характером движения его звеньев и их точек. При этом устанавливается, из каких звеньев и кинематических пар состоит механизм, определяется класс пар и число степеней свободы механизма. Затем выделяются структурные группы, составляющие механизм, и делается вывод о его классе.
1. Подсчёт числа степеней свободы механизма по формуле Чебышева.
2. Кинематическая схема механизма выполнена в масштабе
µ l = _____ (м/мм)
Таблица 1
Звенья, составляющие механизм
| № подвижного звена | |
| Название звена | |
| Характер движения звена |
Таблица 2
Характеристики кинематических пар
| Обозначение кинематической пары на схеме | |
| Номера звеньев, составляющих пару | |
| Вид пары | |
| Класс пары |
3. Класс, вид и порядок групп Ассура, составляющих механизм. Вывод о классе механизма.
4. Формула строения механизма.
Подпись преподавателя
«___» _____________ 20__г.
Протокол
Лабораторная работа №2
Кинематический анализ плоских рычажных механизмов
Цель работы: освоение следующих методов кинематического анализа механизма:
1. Метод планов;
2. Метод замкнутого векторного контура (аналитический метод).
Исходные данные для анализа: кинематическая схема механизма с размерами звеньев, закон движения начального звена.
1. Планы механизма, скоростей и ускорений:
2. Исходные данные механизма, значения вычисленных параметров.
Подпись преподавателя
«___» _____________ 20__г.
Протокол
Лабораторная работа №3
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТЕЛ
Определение момента инерции методом двухниточного подвеса
Цель работы: экспериментальное определение момента инерции тела цилиндрической формы относительно оси вращения.
1.Схема установки.

Р и с. 3.1. Двухниточный подвес
2.Исходные данные.
2.1.Длина нитей l _____ м.
2.2.Расстояние от нити до оси патрона а =____м.
2.3.Масса патрона mп=____кг.
2.4.Масса детали mд =____кг.
2.5. Масса всей системы mt = то + тл = кг.
3. Результаты эксперимента.
3.1. Время двадцати полных колебаний патрона (измеряется три раза):
 c;
c;  c;
c;  c.
c.
3.2. Среднеарифметическое время двадцати полных колебаний патрона:

3.3. Период колебания патрона:

3.4. Время двадцати полных колебаний системы, состоящей из патрона и детали (измеряется 3 раза):
 c;
c;  c;
c;  c.
c.
3.5. Среднеарифметическое время двадцати полных колебаний системы:

3.6. Период колебаний системы:

4. Момент инерции детали относительно оси вращения:
 м2.
м2.
Определение момента инерции методом физического маятника
Цель работы: экспериментальное определение осевого момента инерции твёрдого тела сложной формы.
1. Схема установки (рис. 3.2).

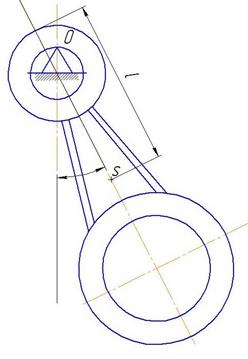
Р и с. 3.2. Физический маятник
2. Исходные данные.
2.1. Масса шатуна m=_____кг.
2.2. Расстояние от центра масс до оси подвеса шатуна l =_____м.
3. Результаты эксперимента.
3.1. Время полных двадцати колебаний шатуна (измеряется 3 раза):
 c;
c;  c;
c;  c.
c.
3.2. Среднеарифметическое время двадцати полных колебаний шатуна:

3.3. Период колебаний шатуна:

4. Вычисление моментов инерции.
4.1. Момент инерции шатуна относительно оси подвеса:
 __________________________________ кг∙м2
__________________________________ кг∙м2
4.2. Момент инерции шатуна относительно оси, проходящей через центр масс:
Jsz = Jz-ml2 =_________________________________________ кг ∙ м2.

