





 |
s = M/W
M = P*ℓ
W = b*h2 / 6
s =P*ℓ*6 / b*h2
P – сила
s – механическое напряжение.
М – изгибающий момент
W – момент сопротивления
Ползучесть – это не 100% передача деформации на датчик из-за некачественной приклейки.
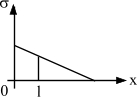
Устраним погрешность от места установки датчика, т.е. механическое напряжение везде одинаково.
s = P*ℓ*6 / k*ℓ*h2 = P*6 / k*h2

Схемы включения тензодатчиков.
1. Делитель U. Т.к. это параметрический датчик, его необходимо подключить к источнику.
 При изменении Rтд будет изменяться Uвых
При изменении Rтд будет изменяться Uвых
Uпит выбирается по документации.
|
При измерении температуры Rтд будет и будет
|
2. Схема включения – мостовая.

Если R3/R1= R4/R2, то Uвых = 0, т.е.
мост сбалансирован.
Если в одно из плеч моста включить тензодатчик, то Uвых моста будет зависеть от Rтд.
Чтобы устранить температурную погрешность используют схемы компенсации.
1.1-го типа.

 Р
Р

 ТДр - рабочий
ТДр - рабочий
|

 ТДк – компенсирующий и располагается
ТДк – компенсирующий и располагается
 перпендикулярно направлению силе.
перпендикулярно направлению силе.


При изменении температуры Rтдр и Rтдк изменяются одинаково, напряжение в точках a и b меняется одинаково: jа = jb = const
2. 2-го типа. Оба датчика рабочие, но т.к. они очень быстро нагреваются, то происходит термокомпенсация.
 1 - сжимается R↑,
1 - сжимается R↑,
Тд1 2 – разжимается R↓,
 Р
Р
Тд2
Мостовая схема чувствительна к изменению R резисторов, включённых в соседние плечи
моста, если эти изменения с разними знаками.
Сопротивление включенные в диагональные плечи моста должны меняться одинаково (R1 и R2).
Питание моста может быть постоянным и переменным, но для практических
целей необходима балансировка моста:
 а) Питание моста постоянным током.
а) Питание моста постоянным током.
Rш < Rб Изменяя положение движка можно балансировать мост.
|
Rш должно быть очень маленьким для
уменьшения пределов изменения Rбал,
т.е. нужна плавная подстройка(доли Ом).

|
Кроме измерения механического напряжения в реальных конструкциях и деталях ТД применяются в составе датчиков веса, давления, перемещения (тензолиты).

