




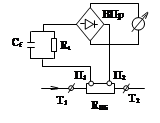
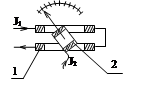
Т1, Т2 – токовые зажимы
П1, П2 – потенциальные зажимы
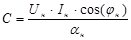
Общие св-ва приборов:
1) Универсальность, многофункциональность, многопредельность;
2) Класс точности 0,2 и ниже (дополнительная погрешность определяется не идеальностью элементов выпрямления);
3) Необходимость введения температурной и частотной компенсации
№15
Электромагнитные приборы (устройство и теория измерительных механизмов, амперметры, вольтметры, основное уравнение, область применения)
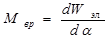
ИМ использует принцип взаимодействия магнитного поля, создаваемого катушкой стоком и магнитного сердечника.
1- 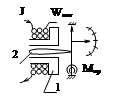 катушка
катушка
2- сердечник
1) Данное уравнение подтверждает физ. принцип  ;
;
2) Прибор измеряет постоянный и переменный ток  ;
;
3) Шкала прибора квадратичная. Для выравнивания шкалы осуществляется математическая оптимизация формы сердечника, чтобы скомпенсировать нелинейную зависимость;
4) Так как L @ KL×(Wвитк)2 то

Уравнение показывает, что a пропорционально ампер-виткам (J×Wвитков). Это дает возможность расширять пределы измерения в пределах номинальных ампер-витков, путем подбора соответствующих значений тока и числа витков (J×Wвитков) ном.;
5) На базе данного ИМ выполняются измерители тока и напряжения в широких пределах;
6) Достижимый класс точности 0.5
Приборы выполняют классов 0,5; 1; …;
7) Источниками дополнительной погрешности есть:
-частота или форма измеряемого сигнала;
 |
-внешние магнитные поля;
Для устранения влияния магнитного поля используют экранирование (это дорого) или астазирование (на шкале такого прибора пишут астатический)
 |
8). На показания прибора в малой степени влияют температура, влажность, вибрации;
Сердечник должен быть магнитомягким и иметь малые потери на гистерезис и вихревые токи.
Одной из модификаций есть логометры, на базе которых могут быть выполнены фазометры и другие приборы.
 |
№16
Электромагнитные логометры и приборы на их основе – схемы, теория, св-ва, область применения
Логометр – прибор, который измеряет отношение двух величин (“logos”-отношение).
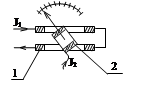
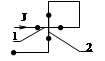
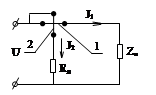
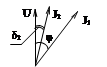
Фазометры работают на принципе логометров,. Схема его включений в цепь показана на рисунке
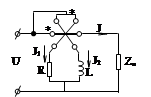 |
Обмотки наматываются так, чтобы моменты М1 и М2 были направлены друг к другу. Равновесие подвижной системы наступает при равенстве
Мвр1= Мвр2
 |


g = 90° - рамки скреплены под углом 90°
Мвр1= Мвр2

 С учетом ВТД:
С учетом ВТД:

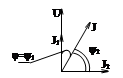
При условии J1 =J2 получим:
ctg j = ctg a
a = j уравнение фазометра
Фазометр – это прибор, который преобразует электрический угол в равный механический
Фазометры могут иметь одностороннюю (0...90°) или двухстороннюю (-90° 0 +90°) шкалу, которая позволяет выполнять измерения при любом характере нагрузки (емкостная, индуктивная) и не требует переключателя направления тока.
Источником дополнительной погрешности есть изменение частоты, формы напряжения (тока) т.к. J1 =J2 только при w=const
Поэтому фазометры применяют в цепях с частотой в пределах 45 ¸55 Гц
Класс точности не выше 0.5
№17
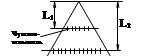
Электростатические приборы (устройство ИМ, уравнение шкалы, св-ва, область применения)
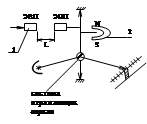
Испльзуется принцип электростатического взаимодействия конструктивных элементов. Вкачестве конструктивных элементов используются пластины различной формы, электроды правильной и неправильной формы.
ЭВП- электрод высокого потенциала
ЭНП- электрод низкого потенциала
1-электроды
2-магнитоиндукционный успокоитель
Система отсчета- световая. Используется для увеличения чувствительности ИМ и точности измерений.
Длина L2 моделируется многократным отражением для увеличения чувствительности. При этом шкала может быть линейная и сферическая.
-  линейная
линейная
-
 - сферическая
- сферическая
Данный ИМ позволяет измерять разность потенциалов или напряжения для цепей постоянного и переменного тока, при этом шкала прибора квадратична. Для выравнивания шкалы применяются электроды особой формы.
Данный ИМ служит основой выполнения вольтметров в широких пределах 10 В ¸ 100 кВ. Поэтому есть одним из основных приборов высоковольтных измерений. При этом есть возможность менять пределы измерения, изменяя расстояние l.
Для расширения функциональных возможностей выполняются комбинированые приборы, сочетающие электронный блок (котор. преобразует входную величину»kx) и электростатический ИМ
№18
Электродинамические приборы (устройство и принцип действия ИМ, уравнение шкалы на постоянном токе, особенности, область применения)
Данный ИМ использует принцип взаимодействия эл. котуров, обтекаемых током.
1- неподвижная катушка
2-подвижная катушка


Mпр=D×a
 (1)
(1)
Уравнение (1) показывает, что a пропорционально произведению токов и изменению взаимоиндуктивности.
Для исключения зависимости  используют катушки такой формы, что дает возможность считать
используют катушки такой формы, что дает возможность считать  в диапазоне шкалы [0-a]
в диапазоне шкалы [0-a]
 (2)
(2)
Если J1=J2=J, то
 (2 `)
(2 `)
Для постоянного тока a соответствует выражениям (2) и (2 `).
Это подтверждает квадратичность шкалы. Выравнивание осуществляется формой катушек.
Общие св-ва приборов:
1) Приборы эл.-динам. системы выполняются для измерения практически всех эл. величин в широких пределах.
2) Это наиболее точные приборы для цепей переменного тока, с классами 0.5 и выше, и поэтому часто являются контрольно-поверочными
3) Приборы потребляют относительно малую мощность, что определяет низкий уровень методической погрешности
4) На показания прибора влияют (дополнительная погрешность) - частота, форма измеряемого сигнала, внешние магн. поля, а также могут влиять температура, влажность, механические воздействия.
№19
Электродинамические приборы (устройство и принцип действия измерительного механизма на переменном токе, уравнение шкалы, схемы включения обмоток, область применения)
Данный ИМ использует принцип взаимодействия эл. котуров, обтекаемых током.
1- неподвижная катушка
2-подвижная катушка
Mпр=D×a
(1)
Уравнение (1) показывает, что a пропорционально произведению токов и изменению взаимоиндуктивности.
Для исключения зависимости используют катушки такой формы, что дает возможность считать в диапазоне шкалы [0-a]
Если J1=J2=J, то
Это подтверждает квадратичность шкалы. Выравнивание осуществляется формой катушек.
 Для переменного тока:
Для переменного тока:
i1=Jm1×sin(wt)
i2=Jm2×sin(wt-y)

Мt – мгновенный момент

Mвр=К2×J1×J2×cos(y)
J1 и J2 - действующие значения токов.
Тогда a по переменному току
 Схемы включения обмоток
Схемы включения обмоток
1. последовательное соединение катушек
J=J1=J2
Cos(y)=1
a=K1×J2
Легко заменяется на a=KU×U2
Данное соединение можно использовать для
Амперметров до 5 А
Вольтметров до 600 В
При этом показания на постоянном и переменном токе одинаковы
2. Параллельное соединение
 |
Угол отклонения пропорционален квадрату действующего значения измеряемого тока
Данное соединение можно использовать для
Амперметров до 10 А
Вольтметров до 100 В
3. комбинированное соединение:
1- неподвижная обмотка (токовая), включается последовательно
2- подвижная обмотка (напряжения)

или приблизительно

Таким образом такое соединение измеряет активную мощность и соответствует ваттметру.
При этом в отличии от других приборов этой системы, шкала ваттметра равномерная
Цена деления прибора (при cos(j)=1)

Для низко косинусных ваттметров
№20
Логометры электродинамической системы (устройство ИМ, уравнение шкалы, приборы на их основе, св-ва, область применения).
Логометр – прибор, который измеряет отношение двух величин (“logos”-отношение).
Фазометры работают на принципе логометров
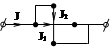
Устройство фазометра
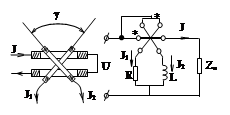 |
Обмотки наматываются так, чтобы моменты М1 и М2 были направлены друг к другу. Равновесие подвижной системы наступает при равенстве
Мвр1= Мвр2

g = 90° - рамки скреплены под углом 90°
Мвр1= Мвр2
С учетом ВТД:
При условии J1 =J2 получим:
ctg j = ctg a
a = j уравнение фазометра
Фазометр – это прибор, который преобразует электрический угол в равный механический
Фазометры могут иметь одностороннюю (0...90°) или двухстороннюю (-90° 0 +90°) шкалу, которая позволяет выполнять измерения при любом характере нагрузки (емкостная, индуктивная) и не требует переключателя направления тока.
Источником дополнительной погрешности есть изменение частоты, формы напряжения (тока) т.к. J1 =J2 только при w=const
Поэтому фазометры применяют в цепях с частотой в пределах 45 ¸55 Гц
Класс точности не выше 0.5

