




ћатлаб-—имулинк структура системы управлени€ на базе ѕ»ƒ-регул€тора показана на рис. 3.21.
ѕримечание. Ќа рис 3.21 использованы следующие латинские обозначени€: ЂPID controllerї - ѕ»ƒ-регул€тор, блок ЂPendulum Cartї описывает уравнени€ движени€ ќ”, блок ЂK gains PIDї описывает значени€ вектора  . Ѕлок ЂUnit Delayї задает врем€ задержки в сигнале измерени€ угла ма€тника. ѕри
. Ѕлок ЂUnit Delayї задает врем€ задержки в сигнале измерени€ угла ма€тника. ѕри  получаем модель свободного движени€.
получаем модель свободного движени€.
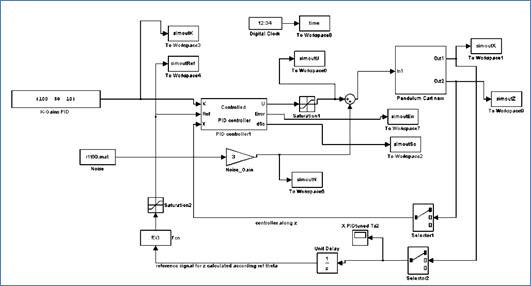
–ис. 3.21. —имулинк структура системы управлени€ ќ” на основе ѕ»ƒ-регул€тора
«адающий сигнал дл€ данной задачи управлени€ €вл€етс€ переменным и вычисл€етс€ следующим образом:  (подробное объ€снение дано в главе 5.4). «ададим также ограничение на задающий сигнал:
(подробное объ€снение дано в главе 5.4). «ададим также ограничение на задающий сигнал:  .
.
¬ыберем следующую область изменени€ коэффициентов усилени€ ѕ»ƒ - регул€тора  и попробуем Ђвручнуюї подобрать посто€нные значени€ дл€ нашей задачи управлени€.
и попробуем Ђвручнуюї подобрать посто€нные значени€ дл€ нашей задачи управлени€.
Ќа рис. 3.22 показано движение перевернутого ма€тника при наличии времени задержки в сигнале измерени€ угла ма€тника и при значени€х , выбранных вручную: 
 .ƒл€ поддержани€ ма€тника в вертикальном положении определить вручную оптимальные коэффициенты усилени€ ѕ»ƒ-регул€тора трудно.
.ƒл€ поддержани€ ма€тника в вертикальном положении определить вручную оптимальные коэффициенты усилени€ ѕ»ƒ-регул€тора трудно.
| 
|
–ис. 3.22. ƒвижение ма€тника с классическим ѕ»ƒ управлением при наличии времени задержки в сигнале измерени€ угла ма€тника
Ёто €вл€етс€ сложной комбинаторной задачей и не всегда под силу даже опытному проектировщику —ј”. ƒл€ решени€ задачи управлени€ будем использовать инструментарий ќЅ« на м€гких вычислени€х.
Ќашей задачей €вл€етс€ спроектировать с помощью ќЅ« оптимальную и робастную Ѕ« Ќ–.
Ќачнем с процесса построени€ обучающего сигнала (ќ—) с помощью √ј (подробнее смотри также в главе 5.4).
ѕостроение обучающего сигнала
¬ыберем следующие параметры поиска дл€ √ј:
Ј область поиска значений вектора с шагом разбиени€  (смотри описание работы √ј в главе 2);
(смотри описание работы √ј в главе 2);
Ј функци€ пригодности представл€ет собой сумму абсолютных значений угла отклонени€ ма€тника и его угловой скорости, вз€тых со знаком минус.
—огласно теории, √ј ищет максимум функции пригодности ‘ѕ. ќднако, дл€ нашей задачи управлени€ оптимальным решением €вл€ютс€ значени€ вектора , дающие минимум отклонени€ ма€тника. –ассматрива€ ‘ѕ с отрицательным знаком, можем заменить задачу поиска минимума на задачу поиска максимума:  . «адав все необходимые дл€ √ј параметры, можем применить его дл€ поиска оптимального сигнала управлени€ дл€ заданной задачи управлени€. ѕо окончании процесса поиска оптимального сигнала управлени€ с помощью √ј, формируем обучающий сигнал дл€ следующего этапа технологии проектировани€.
. «адав все необходимые дл€ √ј параметры, можем применить его дл€ поиска оптимального сигнала управлени€ дл€ заданной задачи управлени€. ѕо окончании процесса поиска оптимального сигнала управлени€ с помощью √ј, формируем обучающий сигнал дл€ следующего этапа технологии проектировани€.
ѕример фрагмента обучающего сигнала, построенного в результате √ј поиска, показан на рис. 3.23.
ак видно из рис. 3.23, ќ— состоит из колонок чисел, представл€ющих значени€ ошибки управлени€, ее скорости и интегральной части, а также соответствующие им оптимальные значени€ коэффициентов усилени€, найденные с помощью √ј.

–ис. 3.23. ‘рагмент обучающего сигнала
ѕроектирование Ѕ« Ќ– - Ётап 2 »“ѕ
Ќа следующем этапе нашей задачей €вл€етс€ извлечение знаний из данных, содержащихс€ в ќ—, и не просто знаний, а робастных знаний, применимых ко многим ситуаци€м управлени€.
|
|
|
ƒл€ этой задачи используем инструментарий ќЅ«. ¬ызываем файл приложени€ ЂSCOWIN.exeї и начинаем процесс проектировани€ Ѕ« на основе ќ— (подробное описание инструментари€ даетс€ в следующей главе 4). Ќачинаем с построени€ новой Ђsco-моделиї, где задаютс€ им€ sco-модели и описываютс€ все атрибуты нечеткой модели вывода.
¬ качестве модели нечеткого вывода выберем модель —угено нулевого пор€дка (смотри теорию в главе 2).
ѕримечание. ѕовторим здесь еще раз тип правил в Ѕ« в выбранной модели нечеткого вывода. ѕродукционное правило выгл€дит следующим образом:
 ,
,
где  - функции принадлежности, описывающие ошибку управлени€ е, ее скорость и интеграл.
- функции принадлежности, описывающие ошибку управлени€ е, ее скорость и интеграл.
Ќа рис. 3.24 показан пример открытого sco-файла дл€ нашей задачи управлени€ движением перевернутого ма€тника.
¬ представленном на рисунке графическом окне описаны все атрибуты Ќ–. ¬ходом в Ќ– €вл€етс€ вектор ошибки управлени€  , выходом Ц вектор
, выходом Ц вектор  , описывающий параметры ѕ»ƒ регул€тора. “аким образом, число входов Ц три, число выходов Ц 3.
, описывающий параметры ѕ»ƒ регул€тора. “аким образом, число входов Ц три, число выходов Ц 3.
¬ этом же окне находитс€ файл с ќ— (структура которого показана на рис.3.23), из которого мы будем извлекать знани€ и строить наши нечеткие правила.
ѕримечание. ‘айл ќ— имеет вид Ђим€.patї.
—ледующее действие - нажимаем первую кнопку слева ЂCreate variablesї и входим в процесс построени€ лингвистических переменных на основе √ј1 дл€ описани€ диапазона изменений значений вектора ошибки управлени€ . Ќа рис. 3.25 показан пример построенных лингвистических переменных дл€ ошибки управлени€ (Ђinput.1ї). »з рисунка видно, что дл€ описани€ диапазона значений ошибки управлени€ ќЅ« выбрал дев€ть лингвистических переменных: Ђinput 1.1ї, Ђinput 1.2ї,Е, Ђinput 1.9ї.
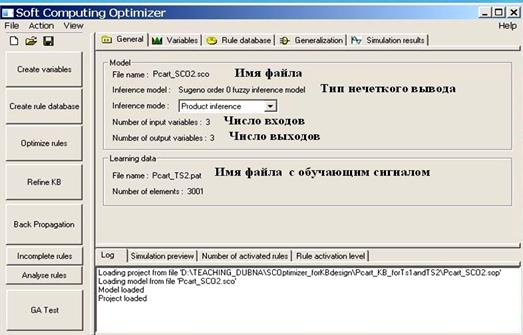
–ис. 3.24. јтрибуты sco-модели дл€ проектировани€ и оптимизации Ѕ«
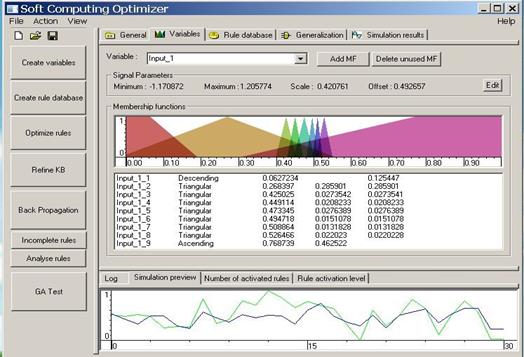
–ис. 3.25. ѕример построенных лингвистических переменных дл€ ошибки управлени€
ѕримечание. ¬ экспертных системах обычно эти лингвистические переменные имеют имена, например Ђочень маленькийї, Ђмаленькийї,Е, Ђбольшойї, Ђочень большойї. ќднако в нашем случае это делать необ€зательно, так процесс построени€ Ѕ« автоматизирован и происходит без участи€ эксперта.
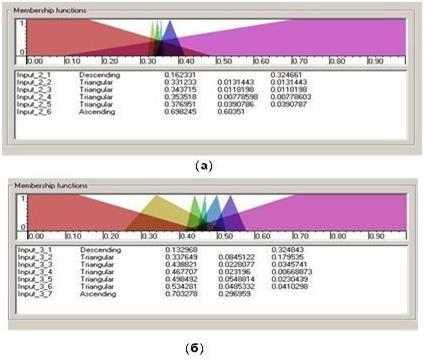
–ис. 3.26. ѕример построенных лингвистических переменных дл€ скорости ошибки управлени€ (а) и интегральной ошибки управлени€ (б)
ƒл€ описани€ диапазона значений скорости ошибки управлени€ (Ђinput.2ї) ќЅ« выбрал шесть лингвистических переменных и дл€ описани€ диапазона значений интегральной ошибки управлени€ (Ђinput.3ї) выбрано семь лингвистических переменных, показанных на рисунке 3.26.
“еперь переходим к кнопке ЂCreate rule databaseї дл€ построени€ Ѕ«. — учетом количества лингвистических переменных дл€ трех входных переменных, полна€ Ѕаза «наний состоит из  378 нечетких правил.
378 нечетких правил.
ѕример построени€ Ѕ« с выбранными критери€ми отбора правил показан на рис. 3.27.
¬ соответствии с выбранными критери€ми (смотри меню слева на рис.3.27), ќЅ« построил базу знаний из 44 правил (окно справа на рис.3.27).
ƒалее с помощью опций ЂOptimize rulesї и ЂRefine KBї проводитс€ оптимизаци€ выбранной Ѕ« с 44 правилами. ѕосле чего, с помощью модели, показанной на рис. 3.28, спроектированна€ Ѕ« провер€етс€, насколько она эффективна и робастна.
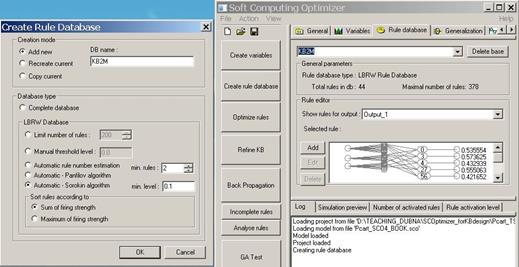
–ис. 3.27. ќкна ќЅ« дл€ построени€ базы правил
|
|
|
“естирование построенной Ѕ«
Ѕудем тестировать качество спроектированной с помощью ќЅ« базы знаний, моделиру€ поведение данного объекта управлени€ в системе ћатлаб. Matlab/Simulink модель »—” на основе нечеткого регул€тора показана на рис. 3.28.
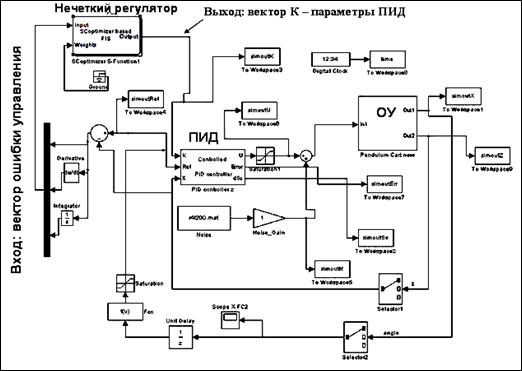
–ис. 3.28. ћатлаб-—имулинк структура нечеткого ѕ»ƒ регул€тора дл€ управлени€ динамической системой Ђперевернутый ма€тник- тележкаї
Ѕлок ЂSCoptimizer S-Function1ї представл€ет собой нечеткий регул€тор (Ќ–), реализующий функцию нечеткого вывода на основе спроектированной Ѕ« с помощью ќЅ«.
ѕараметры блока представлены на рис. 3.29.
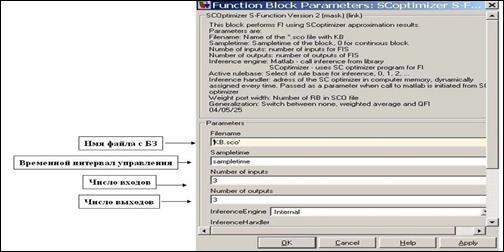
–ис. 3.29. ѕараметры блока нечеткого вывода
Ѕлок ЂSCoptimizer S-Function1ї имеет следующие параметры: им€ файла, содержащего Ѕ« построенную с помощью ќЅ«; число входных и выходных переменных и временной интервал управлени€ Ђsampletimeї = 0.025 сек.

