




1. ѕеред выполнением работы ознакомитьс€ с основными определени€ми и формулами из раздела Ђ“еоретическа€ частьї.
2. ќзнакомитьс€ с заданием к лабораторной работе.
3. Ќарисовать структурную схему —ј” и проставить в блоках выражени€ дл€ передаточных функций с численными значени€ми параметров типовых звеньев, вз€тыми из отчетных материалов лабораторной работы є 2.
4. ѕеред выполнением пунктов 1 и 2 задани€ запустить программу MATLAB и выполнить следующую последовательность действий:
1) «адать в окне команд описание передаточных функций разомкнутой (W (p)), а затем замкнутой (W з(p)) систем, использу€ при этом аналитическое выражение передаточной функции замкнутой —ј” с пропорциональным звеном в цепи обратной св€зи, статический коэффициент усилени€ которого равен 1,  :
:
>> sys = (sys 1 + sys 2)* sys 3* sys 4.
>> sysz = sys *(1 + sys).
2) Ќабрать команду [>> step (sysz); grid ] дл€ вывода переходной функции замкнутой —ј”.
5. ѕо графику переходной функции, пример которой показан на рис. 9, определить следующие показатели качества:
- врем€ регулировани€ t p;
- перерегулирование Δ h max;
- частоту колебаний f к;
- число колебаний n;
- максимальную скорость v max изменени€ регулируемой величины.
¬рем€ регулировани€ t p определ€ет длительность переходного процесса и характеризует быстродействие системы. “еоретически переходной процесс длитс€ бесконечно долго, однако он заканчиваетс€ практически, как только отклонение регулируемой величины от установившегос€ значени€ не будет превышать допустимых пределов ε = (3-5)%∙ h у. »ногда быстродействие системы характеризуют временем t у достижени€ переходной функцией первый раз установившегос€ значени€ или временем t max достижени€ максимального значени€ h max.
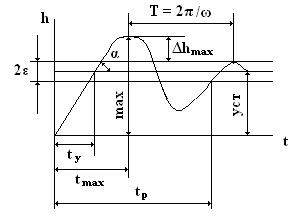
–ис. 9 ѕример переходной характеристики колебательной системы
6. Ќабрать команду [>> bode (sysz); grid ] дл€ вывода частотных функций Ћј„’ и Ћ‘„’ замкнутой —ј”.
7. ѕо графику Ћј„’ (см. рис. 6) определить наклон кривой в области еЄ пересечени€ с осью абсцисс в точке ωср и прот€женность участка с данным наклоном. ≈сли ωср = 20 дЅ/дек, а прот€женность участка средних частот приближенно равна одной декаде, то можно говорить об удовлетворительном приемлемом качестве регулировани€.
8. ѕо графику Ћј„’, если переходной процесс носит колебательный характер, определить значение ωmax.
10. ќформить отчет, который должен содержать:
- название и цель работы;
- основные определени€, аналитические формулы и задаваемые команды;
- выводы с результатами оценки качества регулировани€.
ѕриложение
јЌјЋ»« —ј” — ѕќћќў№ё MATLAB и SIMULINK
ѕо удобству графического пользовательского интерфейса, разнообразию моделей (блоков) в множестве библиотек, наличию виртуальных средств визуализации результатов моделировани€ SIMULINK выгодно отличаетс€ от множества программ аналогичного на значени€. ¬озможности SIMULINK существенно усиливаютс€ дес€тками пакетов расширени€ системы ЂMATLAB + SIMULINKї.
|
|
|
–азработка моделей средствами SIMULINK основана на использовании мыши и технологии Drag-and-Drop (Ђѕеретащи и ќставьї). ƒл€ построени€ моделей —ј” используютс€ модули (или блоки), хран€щиес€ в библиотеке SIMULINK.
Ѕлоки, включаемые в создаваемую модель, могут быть св€заны между собой как по информации, так и по управлению. ’арактер св€зи зависит от типа блока и логики работы модели. ƒанные, которыми обмениваютс€ блоки, могут быть скал€рными величинами, векторами или матрицами произвольной размерности. –ассмотрим построение временных характеристик с помощью пакета Control System на примере апериодического звена первого пор€дка с передаточной функцией W (s) = 1/(0,5∙ s + 1). Ќеобходимо сразу отметить, что в системе MATLAB дл€ обозначени€ оператора Ћапласа вместо символа р используетс€ символ s.
¬ системе MATLAB дл€ построени€ временных характеристик с помощью пакета используютс€ функции step - дл€ построени€ переходной функции h (t) и impulse - дл€ построени€ весовой функции g (t).
–ассмотрим последовательность действий при этом:
1) в окне команд, которое высвечиваетс€ на экране монитора, с помощью клавиатуры задаем описание системы в виде передаточной функции W (s), использу€ при этом прин€тое в MATLAB ее сокращенное обозначение в виде tf (transfer function):
>> sys = tf ([1], [0.5 1]).
ѕараметрами функции tf €вл€ютс€ вектора коэффициентов числител€ и знаменател€ передаточной функции W (s), заключенные в квадратные скобки, которые друг от друга должны быть разделены зап€той. ѕри этом значени€ коэффициентов об€зательно отдел€ютс€ друг от друга пробелами. Ќеобходимо помнить, что при задании дробного числа вместо зап€той следует ставить точку.
2) ѕосле набора функции нажимаетс€ клавиша Enter (ввод), в результате чего в окне команд отобразитс€ набранна€ передаточна€ функци€ в обычном ее представлении:
 .
.
3) «адаем построение временных характеристик путем набора в окне команд соответствующих функций:
- дл€ переходной характеристики: >> step(sys), после чего нажимаем клавишу Enter и на экране в отдельном окне высвечиваетс€ искомый график в следующем виде, рис. ѕ.1
- дл€ весовой (импульсной) характеристики: >> impulse(sys), в результате чего после нажати€ клавиши Enter на экране по€витс€ график функции g (t), рис. ѕ.2
–ассмотрим построение частотных характеристик —ј” с помощью пакета Control System на примере нашего апериодического звена. »сходными данными дл€ построени€ €вл€етс€ рассмотренное выше описание системы, прин€тое в MATLAB, в виде передаточной функции:
>> sys = tf ([1], [0.5 1]).
Ћогарифмическа€ амплитудна€ (Ћј„’) и фазова€ (Ћ‘„’) частотные характеристики задаютс€ в Control System с помощью одной команды bode: >> bode (sys), после запуска которой с помощью нажати€ клавиши Enter на экране по€в€тс€ соответствующие графики, рис. ѕ.3.
ƒиапазон частот дл€ построени€ графиков выбираетс€ по умолчанию автоматически. ¬ случае, если выбранный диапазон не удовлетвор€ет постав
¬ качестве команды на построение годографа амплитудно-фазочастотной характеристики (ј‘„’) используетс€ функци€ nyquist:
>> nyquist (sys)
–ассмотрим построение переходной характеристики дл€ выбранного ранее в качестве примера апериодического звена с помощью программы SIMULINK, которую следует предварительно запустить, выбрав ее из верхней строки (меню) команд на экране монитора.
|
|
|
ƒл€ получени€ переходной характеристики —ј” необходимо с помощью предоставл€емого пользователю инструментари€ SIMULINK смоделировать поступление на вход системы сигнала в виде единичной ступенчатой функции, использу€ дл€ этой цели блок единичного скачка Step, рис. ѕ.4.
ѕосле подключени€ к выходу системы виртуального измерительного прибора в виде осциллографа (блока Scope) и последующего запуска процесса моделировани€ на экране монитора в отдельном окне получим соответствующий график переходной функции, рис. ѕ.5.
ѕри анализе параметров переходного процесса необходимо учитывать, что по умолчанию в блоке Step продолжительность скачка составл€ет не 0 с, а 1 с.
— помощью программы SIMULINK нельз€ получить импульсную характеристику, так как в составе инструментари€ системы отсутствует блок, формирующий δ-функцию, а его моделирование путем дифференцировани€ единичного скачка дает большую погрешность.
—писок литературы:
1. “еори€ автоматического управлени€/ ѕод ред. ј.ј. ¬оронова. „. 1 и 2. Ц ћ.: ¬ысша€ школа, 1986.
2. –отач ¬.я. “еори€ автоматического управлени€ / ”чебник дл€ вузов.
Ц ћ.: ћЁ», 2006.

