




ЋјЅќ–ј“ќ–Ќјя –јЅќ“ј є 3
Ђѕќ—Ћ≈ƒќ¬ј“≈Ћ№Ќјя RC-÷≈ѕ№
ѕ–» ¬ќ«ƒ≈…—“¬»» √ј–ћќЌ»„≈— »’ ќЋ≈ЅјЌ»…ї
¬ыполнила: ћаругина . ј.
√руппа: Ё–-16-15
Ѕригада є7
ѕроверил: ‘ланден ¬. —.
ћосква 2016
ЋјЅќ–ј“ќ–Ќјя –јЅќ“ј є 3
÷ель работы Ч на простейших примерах освоить основные пон€ти€ и методы анализа линейной цепи при гармонических колебани€х.
»зучаютс€ следующие основные вопросы:
1) пон€тие комплексной амплитуды гармонического колебани€; 2) комплексный метод анализа линейной цепи при гармонических колебани€х; 3) поведение простейшей нерезонансной цепи (последовательной RC -цепи) при воздействии гармонических колебаний; 4) векторна€ диаграмма изучаемого процесса; 5) правила вычислени€ эквивалентной емкости при параллельном и последовательном соединении элементов.
“≈ќ–≈“»„≈— јя „ј—“№
ѕредставление о гармонических колебани€х:
≈сли некотора€ величина u(t) измен€етс€ во времени по закону
u(t) = umcos(ωt + φ), (1.1)
то говор€т, что происход€т гармонические колебани€,причем ит называетс€ амплитудой,ωЧ круговой частотой,а аргумент косинуса ωt + φ Ц фазойколебаний (полной фазой); последн€€, если это требуетс€, приводитс€ к значению, лежащему в пределах 0 ÷ 2π; или Цπ ÷ π; величину φ называют начальной фазой (а также фазовым сдвигом или просто фазой).
ћетод комплексных амплитуд:
ѕерейдЄм к изложению обычно используемого в случае гармонических колебаний метода комплексных амплитуд. Ќа основании известной формулы Ёйлера функцию и (1.1) можно представить как вещественную часть экспоненциальной:
 , (1.2)
, (1.2)
где множитель A называетс€ комплексной амплитудой колебаний. ак видно, в комплексном представлениимы имеем произведение функции координат и функции времени.
омплексное сопротивление Z представл€ет собой отношение комплексных амплитуд напр€жени€ и тока:
 (1.3)
(1.3)
RC-цепь Ч электрическа€ цепь, состо€ща€ из конденсатора и резистора. ≈Є можно рассматривать как делитель напр€жени€ с одним из плеч, обладающих Ємкостным сопротивлением переменному току.
RC-цепи пропускают посто€нную составл€ющую сигнала, отсека€ высокие частоты, то есть €вл€ютс€ фильтрами нижних частот. ѕри этом, чем выше посто€нна€ времени{\displaystyle \tau }, тем ниже частота среза. ¬ пределе пройдЄт только посто€нна€ составл€юща€.
” CR-цепей входной сигнал идЄт на конденсатор, а выходной снимаетс€ с резистора. ƒл€ посто€нного напр€жени€ конденсатор представл€ет собой разрыв цепи, то есть посто€нна€ составл€юща€ сигнала в цепи дифференцирующего типа будет отсечена.
“акие цепи €вл€ютс€ фильтрами верхних частот. » частота среза в них определ€етс€ всЄ той же посто€нной времени{\displaystyle \tau }. „ем больше посто€нна€ времени{\displaystyle \tau }, тем ниже частота, котора€ может быть без изменений пропущена через цепь.
ƒќћјЎЌяя ѕќƒ√ќ“ќ¬ ј
—хемы изучаемых цепей
| uвх |
| uC |
| uR |
| R |
| C |
| uC |
| uR |
| R |
| C |
| б) |
| а) |
| uвх |
|
|
|
–ис.1
Ќа (рис. 1, а)выходное напр€жение снимаетс€ с конденсатора, на (рис. 1, б) Ц с резистора.
ќсновные формулы
¬ходное гармоническое напр€жение:
 (1.4)
(1.4)
 (1.5)
(1.5)
¬ыходное напр€жение на конденсаторе:
 (1.6)
(1.6)
 (1.7)
(1.7)
¬ыходное напр€жение на резисторе:
 (1.8)
(1.8)
 (1.9)
(1.9)
Ќачальна€ фаза напр€жени€ на конденсаторе:
 (1.10)
(1.10)
Ќачальна€ фаза напр€жени€ на резисторе:
 (1.11)
(1.11)
оэффициент затухани€ цепи:
 (1.12)
(1.12)
–асчетна€ часть
ƒано: Uвх=1 ¬; φвх=0∞
C1=1/(2ωR)
C2=1/(ωR)
C3=2/(ωR)
ƒл€ случа€ с последовательными конденсаторами:


ƒл€ случа€ с одним конденсатором:



ƒл€ случа€ с параллельными конденсаторами:


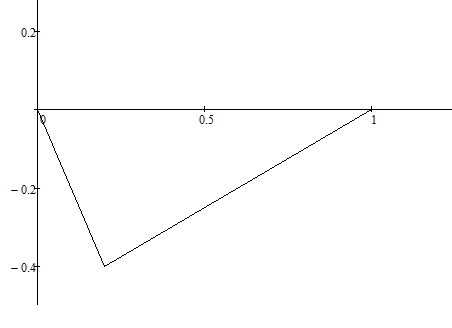
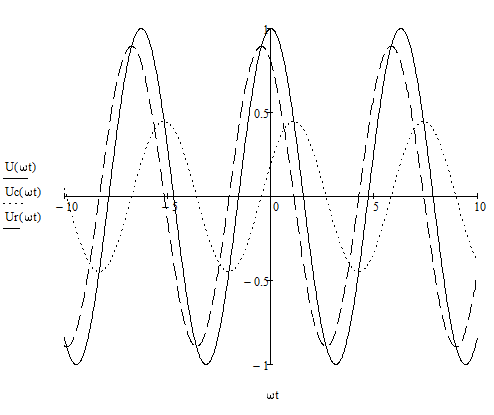
ѕостроение векторных диаграмм
ƒл€ случа€ 1:

ƒл€ случа€ 2:
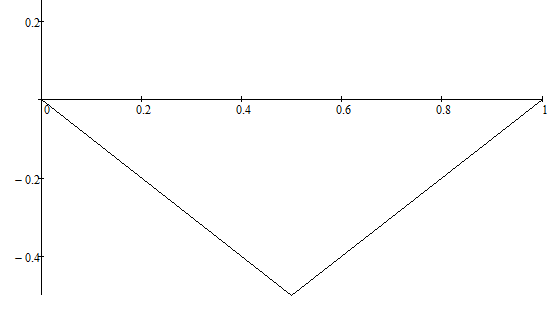
ƒл€ случа€ 3:
ѕостроение осциллограмм
ƒл€ случа€ 1:
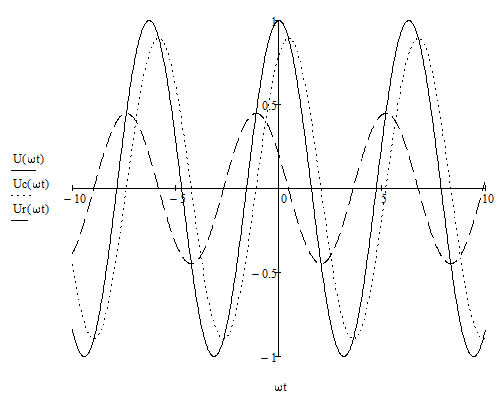
ƒл€ случа€ 2:
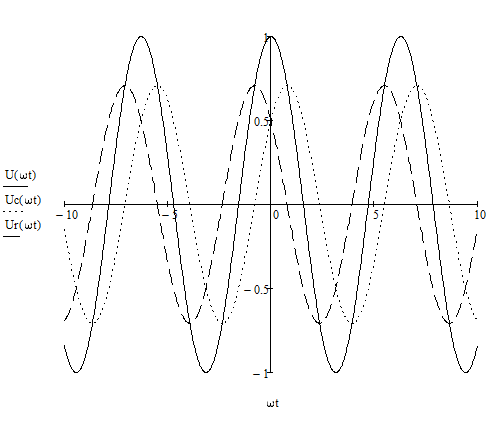
ƒл€ случа€ 3:
Ё —ѕ≈–»ћ≈Ќ“јЋ№Ќјя „ј—“№
3.1. ¬ключили блок питани€ лабораторной установки.
3.2. —обрали исследуемую цепь и установили требуемые значени€.
3.3. »змерили напр€жени€ на резисторе и конденсаторе, также измерили начальную фазу.
3.4. —равнили полученные путем измерений значени€ с результатами расчетов.
“аблица є1
| C | UC, ¬ | UR, ¬ | j C, гр. | j R, гр. | ѕримечани€ |
| ќдиночный элемент | 0,7071 | 0,7071 | -45 | –асчет | |
| 0,69 | 0,685 | -51,6 | 43,2 | »змерение | |
| ѕараллельное соединение | 0,4472 | 0,8944 | -63,43 | 26,56 | –асчет |
| 0,465 | 0,89 | -68,51 | 25,66 | »змерение | |
| ѕоследовательное соединение | 0,8944 | 0,4472 | -26,57 | 63,42 | –асчет |
| 0,905 | 0,435 | -20,86 | 59,47 | »змерение |
≠≠≠≠
≠≠≠
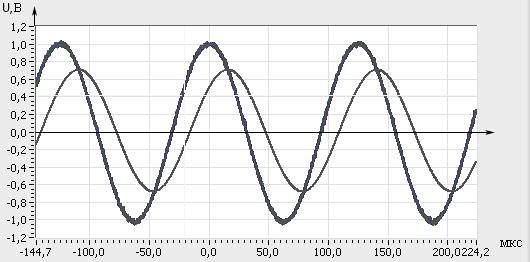
√рафик 1: измерени€ с конденсатора (одиночный).
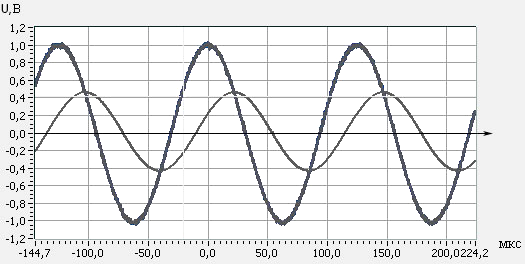
√рафик 2: измерени€ с конденсатора (параллельное соединение).
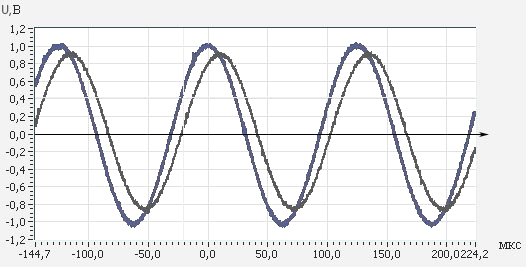
√рафик 3: измерени€ с конденсатора (последовательное соединение).
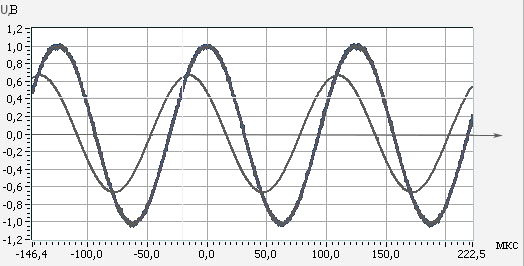
√рафик 4: измерени€ с резистора (одиночный).
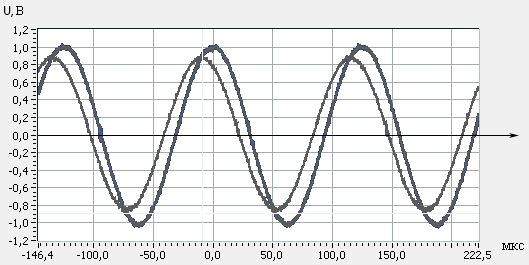
√рафик 5: измерени€ с резистора (параллельное соединение).
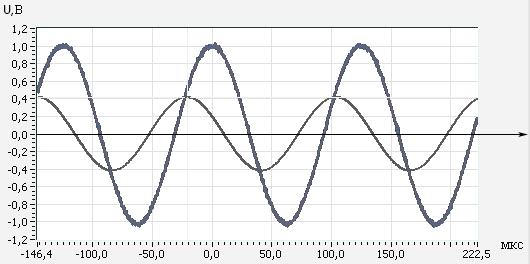
√рафик 6: измерени€ с резистора (последовательное соединение).
¬ывод:
»сход€ из экспериментальных и расчетных данных, видна зависимость амплитуды и смещени€ фазы гармонического сигнала от типа и количества элементов, с которых снимаетс€ напр€жение. ѕри детальном рассмотрении полученных данных становитс€ пон€тно, что при сн€тии напр€жени€ с резистора фаза смещаетс€ вправо (при возрастании сопротивлени€ смещение увеличиваетс€), при сн€тии напр€жени€ с конденсатора фаза смещаетс€ влево (при возрастании емкости смещение увеличиваетс€).

