




Simulink и Scicos:
1. Ќаличие сигналов активации блоков: модель Scicos должна быть конфигурирована по другому, чтобы получить те же результаты.
2. –азмерность входов и выходов: Scicos требует установки этих параметров дл€ блоков, в то врем€ как в SimulinkТе они устанавливаютс€ в соответствии с вычислительным кодом.
»ллюстраци€ 1 показывает пример PID моделей в исполнении Simulink и Scicos.


»з графиков видно, что оба имитатора привод€т к одинаковым результатам.

ѕримеры
»зучать программирование на нагл€дных примерах намного легче, чем читать учебники, как бы хорошо они ни были написаны. ’ороший пример заставл€ет быстро поверить в свои силы и подвигает на создание своих собственных моделей.
ѕример 1. –ассмотрим структуру системы оценивани€ в пространстве состо€ний, получающую выборку данных от линейной системы. —истема смоделирована как линейна€ непрерывна€:
 = јх + ¬u,
= јх + ¬u,
у = Cx,
где A, B, C - посто€нные матрицы.
Ќаблюдению доступен вектор y, поступающий на вход без шумов. роме того, на вход поступает управление u и начальное значение вектора х: х0. Ќа выходе формируетс€ оценка  . ѕереходный процесс в такой системе должен быть по возможности коротким, но при этом флуктуационна€ составл€юща€ ошибки не должна быть велика.
. ѕереходный процесс в такой системе должен быть по возможности коротким, но при этом флуктуационна€ составл€юща€ ошибки не должна быть велика.
”равнение оценивани€ в таком случае имеет вид:
= A + Bu + K(y−C ).
ћатрица K должна быть выбрана так, чтобы у собственных значений − KC были отрицательные вещественные части.
“екст программы Scilab дл€ выполнени€ этой процедуры с неопределенными заранее матрицами, помещенными в контекст модели, €вл€етс€ следующим:

‘ункци€ ppol используетс€, чтобы получить матрицу усилени€ K. Ќа вход u подаетс€ sin (t).
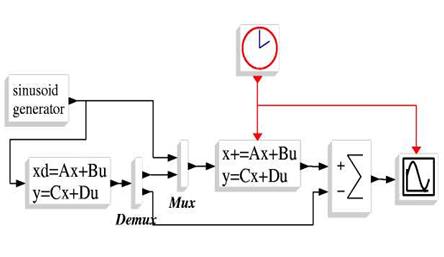
»спользование символических параметров полезно, потому что оно позвол€ет нам создавать универсальную модель. „тобы изменить матрицы A, B, и C и размерность системы или врем€ дискретизации, мы должны изменить только определение m, n и матрицы. Ќикаких изменений в схеме не требуетс€. 

Ќа верхней панели показаны параметры до их изменени€. Ќа нижней после изменени€.
‘актически, перезаписыва€ контекст, мы можем сделать диаграмму полностью универсальной.
—делаем загрузку:

ћы только должны удостоверитьс€, что файл данных datafile содержит переменные A, B, C, D, x0, и dt прежде, чем начать сеанс Scicos. Ётот файл может быть создан в Scilab следующим образом:
→save('datafile'',A,B,C,x0,dt)
омментарий.
≈сли контекст содержит много строк кода Scilab, удобно поместить код в отдельный файл скрипта и выполнить его единственной командой exec в контексте. ќднако, если файл, выполн€емый командой exec, изменен, когда модель уже открыта и пользователь хочет, чтобы изменени€ были прин€ты во внимание, он должен сделать оценку, потому что у Scicos нет никакого способа узнать, были ли сделаны изменени€.
Ќужно также отметить, что использование отдельного файла скрипта подразумевает, что диаграмма Scicos не €вл€етс€ модульной, и этот файл скрипта должен всегда сопровождать модель.
|
|
|
ѕример 2. –ешить дифференциальное уравнение
y'"' + y'"+ y" + 0.5y' + 0.1y = 0.1,
при нулевых начальных услови€х.
ƒл€ самой высокой производной запишем
y'"' = - y'"- y" - 0.5y´- 0.1y + 0.1.
ѕредположим, что y'"' известна. “огда, после четырехкратного интегрировани€ получим у. —ама€ высока€ производна€, y'"' существует между блоками 8 и 1.
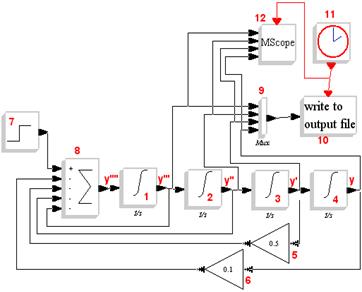
ѕосто€нное слагаемое 0.1 формируетс€ блоком 7 как шаг в момент t=0. ѕроизводные y'", y", y' и y отoбражаютс€ в MScope 12.
–езультаты решени€ через мультиплексор 9 записаны в файл в ASCII-коде блоком 10.
Ќачальные услови€ у всех интеграторов нулевые, в соответствии с услови€ми задачи.
” интеграторов есть верхние и нижние пределы. Ќеобходимо не забывать задать их перед пуском.
Ѕлок 7 по умолчанию имеет начальное врем€ ступени равное 1. ≈го необходимо заменить на 0.
Ѕлоки 5 и 6 не об€зательны, так как можно установить входной множитель в блоке 8. «десь они включены дл€ нагл€дности.
„асы активации имеют начальное врем€ равное нулю, а период 0.1. Ёто не имеет никакого отношени€ к точности решени€, а только задает шаг выхода.
MScope имеет размерность входных портов портов {1 1 1 1}. ¬еличины Ymin и Ymax были установлены после первого прогона. ѕериод обновлени€ (refresh-period) такой же как окончательное врем€ интегрировани€.
«апись в файл (блок 10) удобна тем, что данные могут быть импортированы в другие программы. Ќеобходимо задать им€ файла и задать строку формата в стиле Fortran. Ёто значит:
формат пишетс€ в круглых скобках и включает:
/ Ц нова€ лини€;
iw Ц область целого числа с шириной w знаков;
fw.d Ц область числа с плавающей зап€той шириной w знаков, включа€ d цифры после дес€тичной зап€той. «десь w> = d+3, чтобы включить по крайней мере одну цифру целого числа, знак и точку;
ew.d Ц область числа с плавающей зап€той, степень дес€ти шириной w знаков, включа€ d цифры после дес€тичной зап€той. «десь w> = d+7, чтобы включить по крайней мере одну цифру целого числа, знак дл€ мантиссы, трех знаков дл€ экспоненты, знака экспоненты и одного дл€ точки;
nx n Ц пробелы;
tn Ц перемещает курсор принтера в положение n.
¬ этом примере выбрано (7 (e16.8,1x)) дл€ строки формата (8 дес€тичных чисел), так как величины переменных малы.
ѕример 3. –ассмотрим решение еще одного ƒ”.
ѕродемонстрируем простым примером, как моделирование некоторых уравнений может стать сложным (можно показать как эту задачу можно облегчить с помощью компонентов Modelica). –ассмотрим систему ƒ”:

“еперь покажем реализацию этих уравнений в модели.

¬ блочном подходе есть несколько недостатков. ƒл€ моделировани€ часто необходимо слишком много блоков. Ёто делает модель неудобочитаемой. “акже в такой сложной блок-схеме трудно отразить нагл€дно структуру физической или технической задачи.
ѕример 4.
Ѕлок с массой ћ перемещаетс€ по грубой поверхности с коэффициентом трени€ f. ѕосто€нна€ сила сопротивлени€ Ц fЈMЈg, где g Ц сила т€готени€, и K Ц коэффициент упругости пружины.
ѕокажем движение блока на графике, если его перемещают на 1 метр направо и отпускают.

“акое движение можно описать уравнением:
y" = -y - 0.15*sign (y').
Ќачальное условие дл€ положени€ установлено в 1 метр (в блоке интегратора 2), врем€ окончани€ интеграции 9.4, врем€ обновлени€ MScope 10. ѕериод часов активации 0.01, а начальное врем€ равно нулю.
|
|
|



омментарии.
‘азовый портрет отражает начальные величины y = 1 и y' = 0. —корость в начале равна нулю, а ускорение отрицательно, таким образом, блок начинает перемещатьс€ влево. Ёто означает, что посто€нна€ сила трени€, задаваема€ блоком 6, должна быть положительна и это так и есть, так как она отрицательна на входе (знак минус на входе блока 6).
≈сли установить врем€ интеграции больше, чем физически возможное врем€ (здесь 3Јπ секунды) то Scicos входит в бесконечный цикл и после этого придетс€ остановить модель вручную.
Ћитература
1. Ramine Nikoukhah. Scicos: a dynamic systems modeler and simulator. INRIA-Rocquencourt. Domaine de Voluceau, France.
2. Masoud Najafi. The numerical solver for the simulation of the hybrid dynamical systems. Universite Paris, 2005, 237 c.
3. Jean-Marie Zogg. Arbeiten mit Scilab und Scicos. Fachhochschule Ostschweitz, 2007, 125 c.
4. Finn Haugen. Master Scicos. 8. July 2008.
5. Grudlagen digitale Regelung und Mechatronik Simulation mit Scilab und Scicos. www.ebokaktiv.de
6. Ramine Nikoukhah. Scicos: a dynamic systems modeler and simulator. INRIA, Franse.
7. ћатериалы сайта www.scilab.org

