




“еоретическа€ часть
ѕусть система описываетс€ векторным дифференциальным уравнением с переменными коэффициентами:

 - матрица коэффициентов объекта управлени€, коэффициенты завис€т от времени;
- матрица коэффициентов объекта управлени€, коэффициенты завис€т от времени;
 - пр€моугольна€ матрица распределени€ управл€ющих воздействий. оэффициенты этой матрицы также завис€т от времени.
- пр€моугольна€ матрица распределени€ управл€ющих воздействий. оэффициенты этой матрицы также завис€т от времени.
Ќеобходимо перевести систему из некоторого начального состо€ни€ x(t0) в заданное конечное состо€ние
x(tk) ≅0, (2)
использу€ допустимые функции управлени€  и не выход€ за допустимые пределы по фазовым переменным в процессе движени€.
и не выход€ за допустимые пределы по фазовым переменным в процессе движени€.
ќдин из методов решени€ этой задачи состоит в минимизации критери€ качества, представл€ющего собой сумму квадратичной формы от вектора конечного состо€ни€ и интеграла от суммы квадратичных форм вектора состо€ни€ и вектора управлени€

«десь Gk и Q(t) - положительно полуопределенные матрицы, R(t) - положительно определенна€ матрица.
”правление , минимизирующее (3), можно найти путем совместного решени€ уравнени€ (1) и уравнени€ Ёйлера-Ћагранжа
где гамильтониан

откуда
 .
.
ѕодстановка (7) в (1) приводит к следующей линейной краевой задаче:

–езультатом решени€ двухточечной краевой задачи (8), (9) €вл€етс€ программное управление

где симметрична€ матрица S(t) определ€етс€ из матричного уравнени€ –иккати

при граничном условии S(tk) = Gk, а  и
и  св€заны линейным преобразованием
св€заны линейным преобразованием

¬ектор  можно найти из уравнени€
можно найти из уравнени€

ƒл€ задачи терминального управлени€ основной интерес представл€ет сам непрерывный закон управлени€ с обратной св€зью
 .
.
¬ыбор посто€нных весовых коэффициентов
«акон управлени€ и реакци€ системы в значительной степени завис€т от выбора весовых коэффициентов показател€ качества. ¬заимосв€зь весовых коэффициентов и параметров оптимальной системы или ее реакцией в общем случае очень сложна€.
ƒл€ получени€ допустимых уровней величин  ,
,  и матрицы Gk, Q(t) и R(t) могут быть выбраны, например, диагональными со следующими элементами:
и матрицы Gk, Q(t) и R(t) могут быть выбраны, например, диагональными со следующими элементами:

ƒл€ стационарных систем метод выбора коэффициентов функционала предложен Ёллертом.
ƒл€ объекта второго пор€дка, описываемого уравнением

с показателем качества
где tk=∞, а матрицы Q и R имеют вид
закон управлени€ имеет вид

в котором коэффициенты  определ€ютс€ из решени€ системы нелинейных алгебраических уравнений (11) –иккати
определ€ютс€ из решени€ системы нелинейных алгебраических уравнений (11) –иккати
а вектор определ€етс€ из уравнени€ (13)

“ак как замкнута€ система линейна€ стационарна€, то ее передаточна€ функци€ определ€етс€ как

—огласно процедуре Ёллерта выбор коэффициента Удемпфировани€Ф ζ обеспечивает требуемую степень устойчивости системы при условии, что ни одна из переменных системы не превышает заданных пределов.
ѕосто€нна€ времени T выбираетс€ в соответствии с требуемой полосой пропускани€ системы или ограничени€ми на u2(t) из уравнени€

при подстановке в него максимально допустимой величины u2(t), УнаихудшихФ x1(t), x2(t) и v1(t), предварительно разрешив уравнени€ (22) относительно  .
.
|
|
|
ѕосле определени€ ζ и T весовые коэффициенты q11 и q22 задаютс€ уравнени€ми

ƒл€ выпуклости функционала качества весовые коэффициенты q11 и q22 должны быть неотрицательными. ¬ сущности, это требование служит проверкой непротиворечивости требований проектировани€ в предположении правомерности выбора квадратичного показател€ качества с посто€нными весовыми коэффициентами.
ѕосле определени€ этих величин предположение о бесконечном tk отбрасываетс€ (это €вл€етс€ слабым местом методики Ёллерта) и рассчитываетс€ оптимальна€ система дл€ заданного tk.
ƒл€ объектов, описываемых уравнени€ми более высокого пор€дка, уравнение (23) принимает вид

соответственно дл€ систем первого, второго и третьего типа, то есть систем соответственно с нулевой установившейс€ ошибкой при единичном ступенчатом входном сигнале, единичном линейно нарастающем входном сигнале и т.д.
ѕрактическа€ часть
»сходные данные:
ü оэффициент обратной св€зи 
ü ѕосто€нна€ времени 
ü 
—труктурна€ схема исследуемой системы иммет вид:
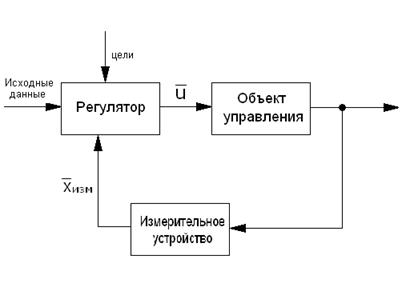
—огласно исходным данным, передаточна€ функци€ имеет вид:

ѕри переходе в пространство состо€ний имеем:
> W=[tf([16],[0.01 0.08 1]) tf([16],[0.01 0.08 1])]
Transfer function from input 1 to output:
---------------------
0.01 s^2 + 0.08 s + 1
Transfer function from input 2 to output:
---------------------
0.01 s^2 + 0.08 s + 1
>> [A,B,C,D]=SSDATA(W)
A = // матрица системы
0 -12.5000
8.0000 -8.0000
B = // матрица управлени€
0 0
0 8.0000
C = // матрица выхода (наблюдени€)
1.0000 0
0 12.5000
Q = // матрица весовых коэффициентов
4.5903 0
0 0.0000
ƒл€ исходной системы Ћј„’ имеют вид:

ѕереходной процесс исследуемой системы:

ћатрицу R вычислим по методу Ѕрайсона и ’о ё-ши:
 дл€
дл€ 

ћатрицу коэффициентов обратной св€зи найдем с помощью подпрограммы lqr (пакетMatLAB)
[K,S,E]=lqr(A,B,Q,R)
sys1=ss(A,B,eye(2),D);
sys2=ss(K);
sys3=ss(C);
Pss1=feedback(sys1,sys2);
Pss1=series(Pss1,sys3);
[A1,B1,C1,D1] = ssdata(Pss1);

— учетом всего выше изложенного график оптимального управлени€ имеет вид:

ƒалее используем подпрограмму feedback, дл€ того, чтобы сформировать замкнутую систему управлени€ и построить переходной процесс оптимальной системы.


