




¬ данной лабораторной работе исследуетс€ —ј”, где ќ” имеет сильно нелинейные свойства. ”правление осуществл€етс€ с помощью пропорционального регул€тора и нечеткого супервизора.
ѕри этом объект управлени€ с существенно нелинейными свойствами [ коэффициент
f(y) =  при управл€ющем воздействии
при управл€ющем воздействии  зависит от управл€емой величины
зависит от управл€емой величины  ], описываетс€ уравнением:
], описываетс€ уравнением:
 . (5)
. (5)
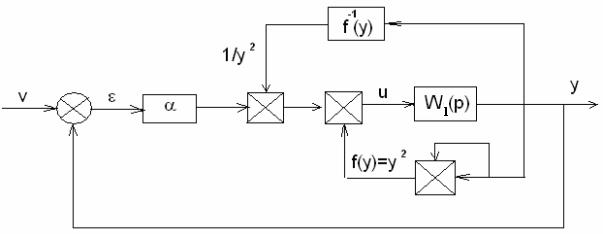
—труктуру данного объекта можно представить как линейную часть с передаточной функцией
 , (6)
, (6)
охваченную квадратичной обратной св€зью (рис. 6).
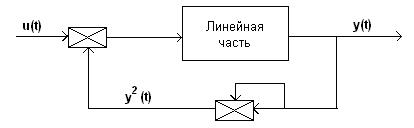
–ис. 6.
÷ель управлени€: найти закон управлени€, который обеспечивал бы качественную работу системы автоматического управлени€ при изменении рабочей точки (состо€нии равновеси€), т.е. значений y = const, дл€ широкого диапазона рабочих точек (0<y<4). ќб€зательным €вл€етс€ выполнение услови€  .
.
–ассмотрим модель системы, в которой управление осуществл€етс€ с помощью пропорционального регул€тора. Ёту систему можно реализовать с помощью инструментального средства Simulink, как показано на рис. 7. ”чтем, что на систему может действовать действует некоторое возмущающее воздействие g(t), которое на схеме представлено в виде блока Disturbance.
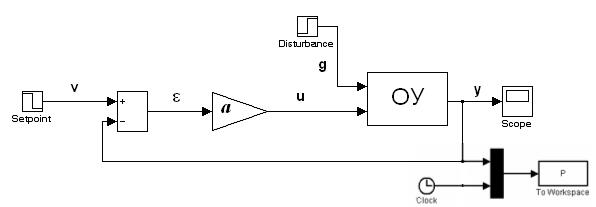
–ис. 7.
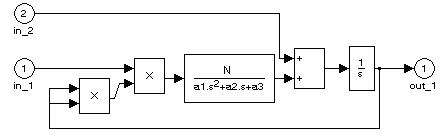
¬нутренн€€ структура ќ”, включа€ линейную и нелинейную часть, может быть раскрыта с помощью рис. 8. — входа in_1 подаетс€ входное воздействие  , а с входа in_2 возмущающее воздействие g(t).
, а с входа in_2 возмущающее воздействие g(t).
 .
.
–ис. 8.
— помощью подбора можно найти удовлетвор€ющий нас коэффициент усилени€ пропорционального регул€тора a, но только дл€ одного входного (а соответственно и дл€ одного выходного значени€), т.е. дл€ одной рабочей точки, например, дл€ v(t)=1(t). Ќетрудно убедитьс€, что, если рабоча€ точка изменитс€, то система перестанет качественно работать. ¬ данной системе (рис. 7) нелинейность свойств вызвана коэффициентом при управл€ющем воздействии .
„тобы исключить вли€ние указанной нелинейности, другими словами, осуществить точную линеаризацию ќ” [3], необходимо включить в систему блок регулировки параметров с нечетким супервизором. –азумно спроектировать нечеткий супервизор, на выходе которого формировалась бы функци€
 . (7)
. (7)
ѕри этом коэффициент пропорционального регул€тора целесообразно находить по формуле
 , (8)
, (8)
где  - коэффициент усилени€ основного регул€тора, обеспечивающий выполнение заданных требований в отношении перерегулировани€ или времени регулировани€ дл€ v(t)=1(t). “огда коэффициент kp можно найти по формуле (8), подставл€€ интересующее нас значение выходной величины y. ƒл€ конкретной системы схема, удовлетвор€юща€ поставленной цели управлени€, может быть представлена в виде рис. 9.
- коэффициент усилени€ основного регул€тора, обеспечивающий выполнение заданных требований в отношении перерегулировани€ или времени регулировани€ дл€ v(t)=1(t). “огда коэффициент kp можно найти по формуле (8), подставл€€ интересующее нас значение выходной величины y. ƒл€ конкретной системы схема, удовлетвор€юща€ поставленной цели управлени€, может быть представлена в виде рис. 9.
–ис. 9.
—упервизор нейтрализует нелинейность  при всех , поэтому система может рассматриватьс€ как линейна€ (точно линеаризованна€) (см. рис. 10).
при всех , поэтому система может рассматриватьс€ как линейна€ (точно линеаризованна€) (см. рис. 10).
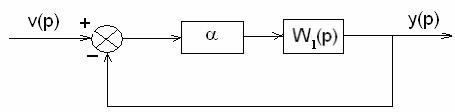
–ис. 10
ќтсюда коэффициент a следует выбирать, использу€ структуру на рис. 10 и исход€ из требований, предъ€вл€емых к проектируемой системе.
|
|
|
¬ общем случае вид функции f(y) точно не задан. ѕоэтому после определени€ коэффициента a включаем на вход объекта еще один усилительный блок с заранее неизвестным коэффициентом  (рис. 11). «атем, счита€ заданным, чему равно f(y) при y=1 (в рассматриваемом случае f(1)=1) определ€ем реакцию системы (рис.11) на v(t)=1(t) и находим величину перерегулировани€
(рис. 11). «атем, счита€ заданным, чему равно f(y) при y=1 (в рассматриваемом случае f(1)=1) определ€ем реакцию системы (рис.11) на v(t)=1(t) и находим величину перерегулировани€  , которое обычно оказываетс€ меньше заданного значени€ перерегулировани€ дл€ проектируемой системы. ѕосле чего дл€ каждой требуемой рабочей точки y=yj, j=1,2,Е,n, другими словами, дл€ каждого задающего воздействи€ v(t)=yj1(t) находим путем симул€ции модели значение коэффициента j, при котором величина перерегулировани€ оказываетс€ близкой к величине .
, которое обычно оказываетс€ меньше заданного значени€ перерегулировани€ дл€ проектируемой системы. ѕосле чего дл€ каждой требуемой рабочей точки y=yj, j=1,2,Е,n, другими словами, дл€ каждого задающего воздействи€ v(t)=yj1(t) находим путем симул€ции модели значение коэффициента j, при котором величина перерегулировани€ оказываетс€ близкой к величине .
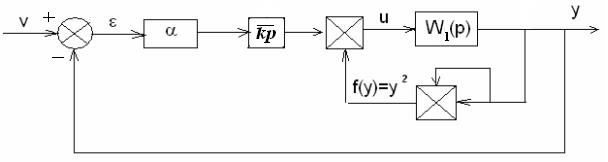
–ис.11
ѕолученные данные сводим в таблицу 2.
“абл. 2
| y1 | y2 | Е | yn |

| 
| Е | 
|
—ледующий шаг Ц реализаци€ супервизора, осуществл€ющего интерпол€цию точек, определ€емых “абл.2. “акой супервизор можно реализовать, примен€€ блок задани€ таблиц Lookup Table из категории Lookup Tables средства Simulink или нечеткий контроллер “акаги-—угено. ¬ последнем случае приходим к нечеткому супервизору.
–ис. 12 иллюстрирует, каким образом можно аппроксимировать желаемую кривую изменени€ коэффициента (y) дл€ n=3, т.е. использу€ три точки (другими словами, три правила) и тем самым осуществить нечеткое супервизорное управление. –азумеетс€, чтобы повысить точность аппроксимации, можно добавить еще правила, которые очевидно улучшат качество управлени€.
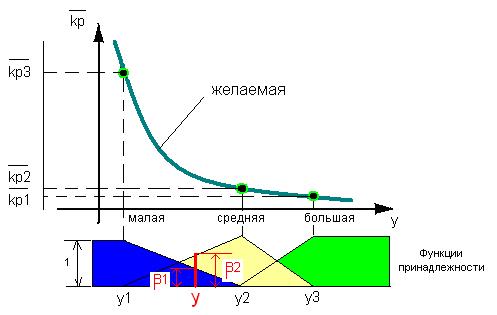
–ис. 12.
»з диапазона изменени€ управл€емой величины y измер€ютс€ три значени€ y, им присваиваютс€ характеристики мала€, средн€€ и больша€. ƒалее выбираютс€ треугольные функции принадлежности. »спользу€ полученные данные, можно составить нечеткие правила дл€ данного случа€ (трех выбранных точек)(трех оредставл€етс€ действительным между ложью и истиной.:
≈сли управл€ема€ величина y больша€, “о коэффициент усилени€  .
.
≈сли управл€ема€ величина y средн€€, “о коэффициент усилени€  .
.
≈сли управл€ема€ величина y мала€, “о коэффициент усилени€  .
.
ѕри этом
 , (9)
, (9)
где  ,
,  ,
,  - переменные, показывающие степень истинности данной предпосылки.
- переменные, показывающие степень истинности данной предпосылки.
ѕравила не аналогичны заданию таблиц, так как нечетка€ арифметика интерполирует форму нелинейной функции. ѕоказано, что объем пам€ти, требуемый дл€ хранени€ информации о функци€х принадлежности и правил значительно меньше, чем дл€ таблиц задани€, в особенности дл€ систем с несколькими входами, в результате чего скорость вычислений может быть повышена.
Ќаконец, замен€€ блок  (рис. 9) блоком задани€ таблиц или нечетким супервизором, получаем искомую систему, котора€ должна удовлетвор€ть предъ€вл€емым требовани€м.
(рис. 9) блоком задани€ таблиц или нечетким супервизором, получаем искомую систему, котора€ должна удовлетвор€ть предъ€вл€емым требовани€м.

