




ƒл€ роботи з —ќћ-перех≥дником €кий застосовуЇтьс€ в даному курсовому проект≥ потр≥бно встановити драйвер дл€ певноњ ќ—.
ƒл€ реал≥зац≥њ нашоњ програми створимо два потоки дл€ роботи функц≥й введенн€ та виведенн€ масив≥в даних. “ак €к два р≥зних потоки не можуть одночасно працювати з≥ сп≥льним ресурсом, створюЇмо затримки дл€ цих поток≥в. Ќаприклад: коли пот≥к ј буде працювати з≥ сп≥льним ресурсом, пот≥к Ѕ буде оч≥кувати зв≥льненн€ сп≥льного ресурсу. як т≥льки пот≥к ј зв≥льнить ресурс, пот≥к Ѕ почне роботу з ним.
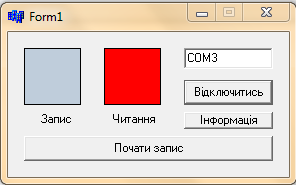
ќтже, розберемо роботу програми €ка зображена на рисунку 2.1.
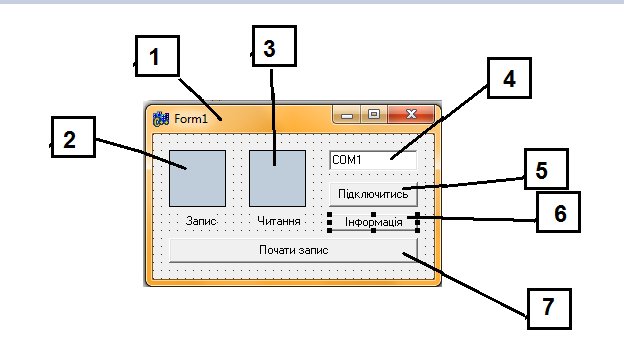
–ис. 2.1 Ц ¬≥кно робочоњ програми
1) —творимо в≥кно програми функц≥Їю __fastcall TForm1::TForm1(TComponent* Owner): TForm(Owner) { }.
2) нопки п≥д номерами 2,3,4,5,6,7 створюютьс€ за допомогою void __fastcall TForm1::Button N Click(TObject *Sender) Ц де N номер певноњ кнопки.
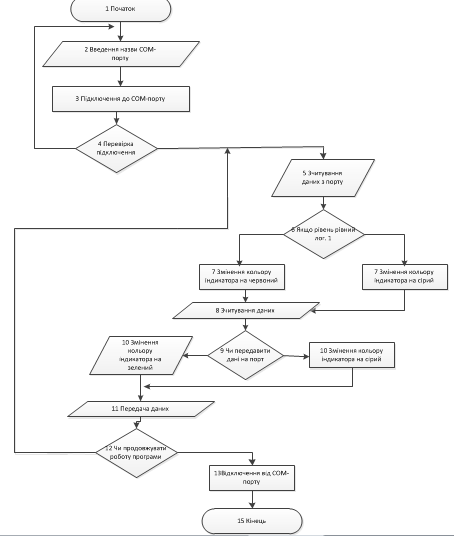
ƒл€ правильноњ роботи програми потр≥бно спершу п≥дключитись до потр≥бного COM-порту. ƒл€ цього в пол≥ п≥д номером 4, вводимо назву потр≥бного порту. ѕ≥сл€ чого натискаЇмо на кнопку п≥д номером 5. ѕ≥сл€ чого проводимо перев≥рку чи д≥йсно програма п≥дключилась до потр≥бного порту, €к показано на алгоритм≥ рис. 2.1.

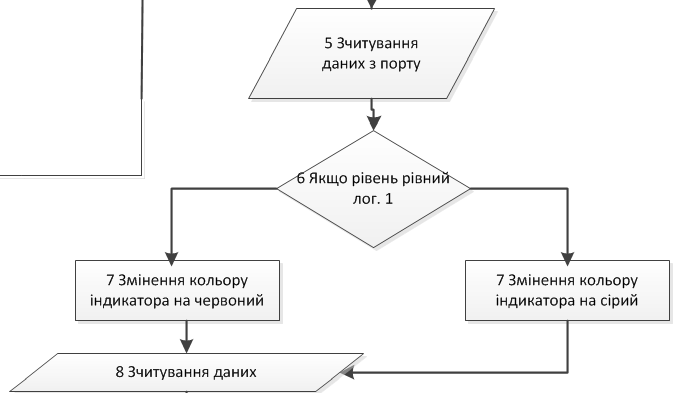
–ис. 2.1 Ц јлгоритм п≥дключенн€ до COM-порту
«читаЇмо дан≥ з п≥дключеного —ќћ-порту. якщо р≥вень сигналу р≥вний р≥вню лог≥чноњ 1, тод≥ зм≥нюЇмо кол≥р ≥ндикатора на червоний (–ис. 2.1 п≥д номером 2, –ис. 2.2, 2.6) та зчитуЇмо дан≥. якщо н≥, зм≥нюЇмо кол≥р ≥ндикатора на с≥рий (–ис. 2.5) ≥ переходим до наступного пунтку.
ƒал≥, в≥дбудетьс€ запис даних в —ќћ-порт. якщо Ї дан≥ дл€ передач≥, зм≥нимо кол≥р ≥ндикатора на зелений (–ис. 3.1 п≥д номером 3, –ис. 3.7), та передаЇмо дан≥. якщо ж н≥, кол≥р ≥ндикатора залишаЇтьс€ с≥рим (–ис. 2.5) ≥ переходим до наступного пунтку. ќстанн≥м пунктом перев≥р€Їтьс€ чи продовжувати роботу пограми, €кщо н≥ то виходимо з програми, €кщо так вертаЇмось до початку програми. ѕовний алгоритм наведено в додатку ј.
ќтже, в результат≥ виконанн€ цих пункт≥в отримуЇмо таку робочу програму (–ис 2.4). од програми наведений в додатку Ѕ.
–ис. 2.2 Ц «читуванн€ даних з —ќћ-порту

–ис. 2.3 Ц ѕередача даних в —ќћ-порт
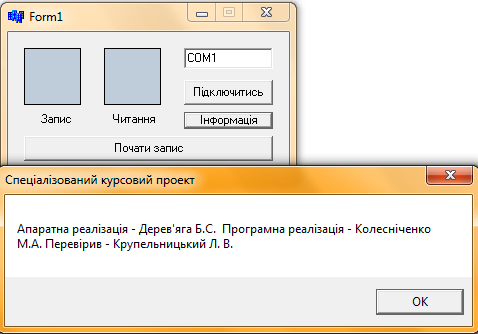
–ис. 2.4 Цѕрограма та ≥нформац≥€ про розробник≥в.
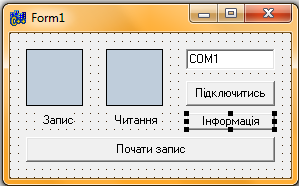
–ис. 2.5 Ц ѕ≥дключенн€ COM-порту
–ис. 2.6 Ц ¬≥дбуваЇтьс€ зчитуванн€ даних.
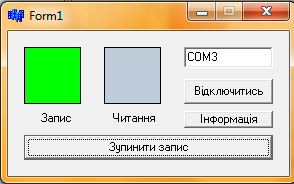
–ис. 2.7 Ц ¬≥дбуваЇтьс€ запис даних.
ƒана програма може працювати в будь-€к≥й верс≥њ Windows на €ку встановлена оболонка Borland Builder C++. ¬ результат≥ комп≥люванн€ даноњ програми був створений виконуваний файл Project1.exe.
¬»—Ќќ¬ »
¬ дан≥й науково-досл≥дн≥й робот≥ було проведено анал≥з посл≥довних ≥нтерфейс≥в COM та USB, та передача поток≥в даних через них. “акож наведено детальну ≥нформац≥ю про середовище розробки Borland Builder, робота з високор≥вневою мовою програмуванн€ —++. ћожливост≥ реал≥зац≥њ передач≥ даних на зовн≥шн≥й пристр≥й за допомогою мови C++.
Ѕуло розроблено програму дл€ лабораторного стенду плати ≥ндикац≥њ вводу/виводу дл€ передач≥ та зчитуванн€ поток≥в даних на та з COM-порту.
|
|
|
≈ќћ IBM PC, на €кому в≥дбуваЇтьс€ робота програми, повинен мати наступн≥ м≥н≥мальн≥ конф≥гурац≥њ:
1. ѕроцесор 286DX/66MHz або кращий;
2. ќперативну памТ€ть не менше 16 ћЅ;
3. 3,19 ћЅ в≥льного м≥сц€ на жорсткому диску;
4. ќ— Windows 95/98/NT/ME/2000/XP/Vista/Win 7/ Win 8;
5. ћон≥тор;
6. ¬≥део карту.
ѕ≈–Ћ≤ ѕќ—»ЋјЌ№
1. http://cisco.opennet.ru/docs/RUS/serial_guide/index.html#2_2 Ц розробка програм дл€ RS-232;
2. http://www.softelectro.ru/rs232.html - опис RS232, COM порт≥в;
3. http://www.denvo.ru/pub/hardware/rs-232.html - ≥нтерфейс RS-232;
4. 4 http://www.realcoding.net/articles/programmirovanie-com-portov.html- програ-
муванн€ COM порт≥в;
5. http://carradio.narod.ru/03.html - програмуванн€ порт≥в вводу/виводу;
6. http://www.comprog.ru/Assembler/article_267.htm - програмуванн€ COM порт≥в;
7. http://www.alterbit.ru/glossary121.html - ун≥версальна посл≥довна шина;
ƒќƒј“ »
ƒќƒј“ќ ј
јлгоритм програми
ƒќƒј“ќ Ѕ
од програми
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
HANDLE hComPort, hComPortW, hComPortR;
// ≥ндеф≥катори порт≥в запису читанн€
int status = 0; // статус п≥дключенн€
int thStW = 0; // статус запису в порт
DWORD bytes; // зм≥нна €ка м≥стить зчитаних к-сть байт
char *szComPort; // зм≥нна €ка м≥стить назву порта
char buf[4]; // допом≥жний буфер даних
char *buf_out = "1"; // масив даних €к≥ в≥дправл€ютьс€ в порт
char *buf_in = new char[strlen(buf_out)]; // буфер дл€ читанн€ даних
int a = 0;
HANDLE hThreadR, hThreadW;
// ≥ндеф≥катори функц≥й поток≥в читанн€ та запису
DWORD thIDR, thIDW; // ≥ндеф≥катори поток≥в
DWORD WINAPI read(LPVOID IpParam);
// оголошенн€ функц≥њ потоку дл€ читанн€
DWORD WINAPI write(LPVOID IpParam);
// оголошенн€ функц≥њ потоку дл€ запису
__fastcall TForm1::TForm1(TComponent* Owner) // створенн€ форми
: TForm(Owner)
{ }
void __fastcall TForm1::Button1Click(TObject *Sender) // створенн€ кнопки п≥дключенн€ до пристрою
{
if (status == 1) { // €кщо в≥н п≥дключений
// CloseHandle(hComPort); // в≥дключитись в≥д порта
SuspendThread(hThreadR); // зупитини пот≥к читанн€
SuspendThread(hThreadW); // зупитини пот≥к запису
Shape1->Brush->Color=clInactiveCaption; // задати с≥рим кольором запис
Button1->Caption="ѕ≥дключитись"; // зм≥нити напис на п≥дключитись
status = 0; // занулюЇмо
}else{ // €кщо пристр≥й не був п≥дключений
hComPort = CreateFileA(COM1->Text.c_str(), GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0); // п≥дключенн€ до ком порта
COMMTIMEOUTS ComTimeouts={100,100,150,100,150}; // затримки запису, читанн€
SetCommTimeouts(hComPort, &ComTimeouts); // виконати затримки
if (hComPort == INVALID_HANDLE_VALUE) { // перев≥рка п≥дключенн€ до ком порта
MessageBox(NULL, "Ќеможливо п≥дключитись до пристрою", "ѕомилка", MB_OK); // виведенн€ пов≥домленн€
}else{ //€кщо п≥дключились
CloseHandle(hComPort);
Button1->Caption="¬≥дключитись"; // м≥н€Їмо напис на в≥дключенн€
szComPort = COM1->Text.c_str(); // зчитуЇмо дан≥ про ком порт
|
|
|
hThreadR = CreateThread(NULL,0,read,0,0,&thIDR);
// запуск пот≥к читанн€
status = 1; // записуЇм одиничку
if(thStW == 1){
// перев≥р€Їмо чи попередньо в≥дбувавс€ запис в ком порт
ResumeThread(hThreadW); // в≥дновлюЇмо пот≥к запису
}
}
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
// створенн€ кнопки дл€ початку ≥ зупиненн€ запису
{
if(Shape1->Brush->Color == clLime){ // зафарбувати зеленим
SuspendThread(hThreadW); // зупин€Їмо пот≥к запису
Shape1->Brush->Color=clInactiveCaption; // зафарбовуЇмо с≥рим
Button2->Caption="ѕочати запис";
// в≥дображенн€ напису "почати запис" на кнопц≥
}else{
Shape1->Brush->Color=clLime; // зафарбовуЇмо зеленим
Button2->Caption="«упинити запис";
// в≥дображенн€ напису "зупинити запис" на кнопц≥
ResumeThread(hThreadW); // в≥дновлюЇмо пот≥к запису
if(thStW == 0){ // €кщо попередньо запис не в≥дбувавс€
hThreadW = CreateThread(NULL,0,write,0,0,&thIDW); // створюЇмо пот≥к
thStW = 1; // вказуЇмо що пот≥к попередньо запускалась
}else{
ResumeThread(hThreadW); // в≥дновлюЇмо роботу потоку дл€ запису
}
}
}
//---------------------------------------------------------------------------
DWORD WINAPI write(LPVOID IpParam){ // функц≥€ потоку дл€ запису в порт
while(1){
WriteFile(hComPort, buf_out, strlen(buf_out), &bytes, NULL); // запис в порт
}
}
DWORD WINAPI read(LPVOID IpParam){ // функц≥€ потоку дл€ читанн€ з порту
while(1){
hComPort = CreateFileA(Form1->COM1->Text.c_str(), GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0); // п≥дключенн€ до ком порта
COMMTIMEOUTS ComTimeouts={100,100,150,100,150}; // затримки запису, читанн€
SetCommTimeouts(hComPort, &ComTimeouts); // виконати затримки
ReadFile(hComPort, buf_in, 1, &bytes, NULL);
CloseHandle(hComPort); // читанн€ з порту
if(bytes == 1){ // перев≥рка к≥лькост≥ прочитаних байт
Form1->Shape2->Brush->Color=clRed; // зм≥на кол≥ру в≥кна читанн€ на червоний
}
else{
Form1->Shape2->Brush->Color=clInactiveCaption; // зм≥на кол≥ру в≥кна читанн€ на с≥рий
}
}
}
void __fastcall TForm1::Button3Click(TObject *Sender) // створенн€ кнопки розробники
{
MessageBox(NULL, "јпаратно - ƒерев'€га Ѕ.—. ѕрограмно - олесн≥ченко ћ.ј.", "–озробники", MB_OK); // виведенн€ пов≥домленн€
}
//---------------------------------------------------------------------------

