




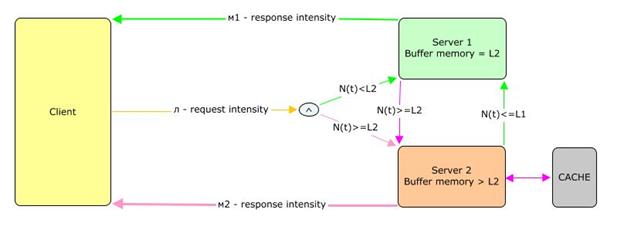
–ис. 3 онцептуальна€ модель гистерезисного управлени€ потоком заданий в серверной системе
¬ представленной концептуальной модели отражены два режима работы сервера, в зависимости от размера буферной пам€ти. —огласно функциональной модели, серверна€ система производит смену между режимами работы, когда очередь запросов превышает L2, соответственно текущий размер буферной пам€ти при работе в первом режиме равен L2. ќбратна€ смена происходит, когда размер очереди падает до L1. –азмер буферной пам€ти второго сервера > L2
¬ зависимости от режима, в котором выполн€етс€ работа сервера, интенсивность ответов на клиентские запросы равна  - при работе в первом режиме (с буферной пам€тью L2) и
- при работе в первом режиме (с буферной пам€тью L2) и  - при работе во втором режиме (с буферной пам€тью > L2).
- при работе во втором режиме (с буферной пам€тью > L2).
–азработка приложени€ дл€ определени€ показателей качества двухуровневого управлени€ потоком заданий в серверной системе
“абл. 1
ѕараметры исследуемой системы
| System #3 | |
|
| 
|
|
| 
|
| ћеханизм управлени€ | √истерезисное |
| ѕараметры управлени€ | 

|
Ч интенсивность потока ответов сервера дл€ режима работы с первым сервером;
Ч интенсивность потока ответов сервера дл€ режима работы со вторым сервером;
 Ч интенсивность вход€щего потока запросов, при которой выполн€етс€ переход на другой сервер при гистерезисном управлении;
Ч интенсивность вход€щего потока запросов, при которой выполн€етс€ переход на другой сервер при гистерезисном управлении;
 Ч интенсивность вход€щего потока запросов, при которой выполн€етс€ смена режима работы при гистерезисном управлении.
Ч интенсивность вход€щего потока запросов, при которой выполн€етс€ смена режима работы при гистерезисном управлении.
ѕараметры и дл€ исследуемых систем отличаютс€ между собой на пор€док, что отражает увеличение интенсивности потока ответов.
»нтенсивность поступлени€ запросов  - измен€емый параметр.
- измен€емый параметр.
ѕараметры  дл€ первой и второй системы из лабораторной работы є5 заданы равными параметрам
дл€ первой и второй системы из лабораторной работы є5 заданы равными параметрам  и системы соответственно с двухуровневым управлением. »сход€ из этого и учитыва€ особенности гистерезисного управлени€, можно сделать предположение о том, что характеристики систем будут соотноситьс€ следующим образом:
и системы соответственно с двухуровневым управлением. »сход€ из этого и учитыва€ особенности гистерезисного управлени€, можно сделать предположение о том, что характеристики систем будут соотноситьс€ следующим образом:

|
где  ,
,  ,
,  Ц характеристики i -й системы.
Ц характеристики i -й системы.
ƒл€ оценки динамических характеристик реализуем необходимые функции в среде Matlab.
‘ункци€ gisterN(lam, m_1, m_2, L_1, L_2) вычисл€ет значение  Ц среднее количество запросов, наход€щихс€ в системе, при гистерезисном управлении:
Ц среднее количество запросов, наход€щихс€ в системе, при гистерезисном управлении:

–ис. 4 ќписание функции GisterN
‘ункци€ gisterQ(lam, m_1, m_2, L_1, L_2) вычисл€ет значение  Ц среднее количество запросов, ожидающих обработки, при гистерезисном управлении:
Ц среднее количество запросов, ожидающих обработки, при гистерезисном управлении:

–ис. 5 ќписание функции GisterQ
function Q = gisterQ(lam, m_1, m_2, L_1, L_2)
%GISTERP returns average Q value for hysteresys control system
% k state number = queue length
% lam input intensity
% m_1 output intensity for 1st mode
% m_2 output intensity for 2nd mode
% L_1 hysteresis control 1st parameter
% L_2 hysteresis control 2nd parameter
r=lam./m_1;
r_1=lam./m_2;
q=L_2-L_1-1;
P_0=(1./(1-r)-((q+1).*r.^(L_1+q).*(r-r_1))./((1-r.^(q+1)).*(1-r_1))).^(-1);
|
|
|
Q=P_0.*(((r-(L_1+1).*r.^(L_1+1)+L_1.*r.^(L_1+2))./(1-r).^2 -(r-r.^(L_1+1))./(1-r))+(r.^(L_1).*(1-r))./(1-r.^(q+1)).*((L_1-1).*(((r-r.^(q+1))./(1-r)-q.*r.^(q+1))./(1-r)+(r.^q.*r_1.*(q-(r_1-r_1.^(q+1))./(1-r_1)))./(1-r_1))+(((r-(q+1).*r.^(q+1)+q.*r.^(q+2))./(1-r).^2 -(r.^(q+1).*q.*(q+1))./2)./(1-r)+(r.^q.*r_1.*((q.*(q+1))./2-(r_1-(q+1).*r_1.^(q+1)+q.*r_1.^(q+2))./(1-r_1).^2))./(1-r_1)))+((1-r_1.^(q+1)).*(1-r).*r.^(L_1+q))./((1-r.^(q+1)).*(1-r_1)).*((r_1.*(L_1+q-1))./(1-r_1)+r_1./(1-r_1).^2));
end

–ис. 6 –еализаций функций и построение графиков зависимостей в системе MatLab
√рафики зависимостей  и
и  дл€ исследуемых систем показаны на рис. 5.
дл€ исследуемых систем показаны на рис. 5.

–ис. 7 √рафики зависимостей среднего количества запросов в системе и среднего количества ожидающих обслуживани€ запросов от интенсивности вход€щего потока запросов дл€ исследуемых систем с одноуровневым и гистерезисным управлением потоком заданий
Ќа рис. 7 величины  и
и  Ц характеристики дл€ i -й системы. »з графиков видно, что характеристики и монотонно возрастают с увеличением интенсивности вход€щего потока . “акже видно, что среднее количество ожидающих обслуживани€ запросов приблизительно на 1 меньше среднего количества запросов в системе , что соответствует сути данных характеристик.
Ц характеристики дл€ i -й системы. »з графиков видно, что характеристики и монотонно возрастают с увеличением интенсивности вход€щего потока . “акже видно, что среднее количество ожидающих обслуживани€ запросов приблизительно на 1 меньше среднего количества запросов в системе , что соответствует сути данных характеристик.
ѕри  длина очереди не превышает порогового значени€ L дл€ систем с одноуровневым управлением и порогового значени€ дл€ систем с гистерезисным управлением, так как система работает преимущественно с первым сервером. ѕри приближении величины к значению система работает преимущественно со вторым сервером; длина очереди на некотором интервале возрастает слабо, затем неограниченно возрастает. ѕри
длина очереди не превышает порогового значени€ L дл€ систем с одноуровневым управлением и порогового значени€ дл€ систем с гистерезисным управлением, так как система работает преимущественно с первым сервером. ѕри приближении величины к значению система работает преимущественно со вторым сервером; длина очереди на некотором интервале возрастает слабо, затем неограниченно возрастает. ѕри  система уже не в состо€нии обработать вход€щий поток запросов, характеристики и
система уже не в состо€нии обработать вход€щий поток запросов, характеристики и  определить нельз€.
определить нельз€.
¬ыполн€ютс€ следующие услови€:

что соответствует сделанному ранее предположению.

–ис. 8 ќписание функции GisterW
function W = gisterW(lam, m_1, m_2, L_1, L_2)
% k state number = queue length
% lam input intensity
% m_1 output intensity for 1st mode
% m_2 output intensity for 2nd mode
% L_1 hysteresis control 1st parameter
% L_2 hysteresis control 2nd parameter
r=lam./m_1;
r_1=lam./m_2;
q=L_2-L_1-1;
P_0=(1./(1-r)-((q+1).*r.^(L_1+q).*(r-r_1))./((1-r.^(q+1)).*(1-r_1))).^(-1);
W=P_0./lam.*(((r-(L_1+1).*r.^(L_1+1)+L_1.*r.^(L_1+2))./(1-r).^2 -(r-r.^(L_1+1))./(1-r))+(r.^(L_1).*(1-r))./(1-r.^(q+1)).*((L_1-1).*(((r-r.^(q+1))./(1-r)-q.*r.^(q+1))./(1-r)+(r.^q.*r_1.*(q-(r_1-r_1.^(q+1))./(1-r_1)))./(1-r_1))+(((r-(q+1).*r.^(q+1)+q.*r.^(q+2))./(1-r).^2 -(r.^(q+1).*q.*(q+1))./2)./(1-r)+(r.^q.*r_1.*((q.*(q+1))./2-(r_1-(q+1).*r_1.^(q+1)+q.*r_1.^(q+2))./(1-r_1).^2))./(1-r_1)))+((1-r_1.^(q+1)).*(1-r).*r.^(L_1+q))./((1-r.^(q+1)).*(1-r_1)).*((r_1.*(L_1+q-1))./(1-r_1)+r_1./(1-r_1).^2));
end

–ис. 9 –еализаци€ функции GisterW и построение графика зависимости
Ќа рис. 10 показаны графики зависимостей  дл€ исследуемых систем.
дл€ исследуемых систем.
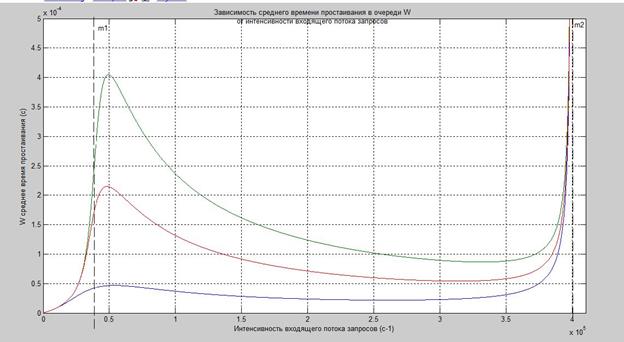
–ис. 10 √рафики зависимостей среднего времени простаивани€ в очереди от интенсивности вход€щего потока запросов дл€ исследуемых систем с одноуровневым и гистерезисным управлением потоком заданий
Ќа рис. 10 величина  Ц среднее врем€ простаивани€ в очереди дл€ i -й системы. »з графиков видно, что значение
Ц среднее врем€ простаивани€ в очереди дл€ i -й системы. »з графиков видно, что значение  монотонно возрастает с увеличением интенсивности вход€щего потока при ; при близком к функци€ имеет локальный максимум. ѕри приближении величины к значению на некотором интервале среднее врем€ простаивани€ в очереди убывает, так как возрастает веро€тность нахождени€ системы в режиме работы со вторым сервером. ѕри близком к функци€ неограниченно возрастает. ѕри система уже не в состо€нии обработать вход€щий поток запросов, и характеристику определить нельз€. “акже из графиков видно, что выполн€етс€ соотношение
монотонно возрастает с увеличением интенсивности вход€щего потока при ; при близком к функци€ имеет локальный максимум. ѕри приближении величины к значению на некотором интервале среднее врем€ простаивани€ в очереди убывает, так как возрастает веро€тность нахождени€ системы в режиме работы со вторым сервером. ѕри близком к функци€ неограниченно возрастает. ѕри система уже не в состо€нии обработать вход€щий поток запросов, и характеристику определить нельз€. “акже из графиков видно, что выполн€етс€ соотношение
|
|
|

что соответствует сделанному ранее предположению.

–ис. 11 ќписание функции GisterS
function S = gisterS(lam, m_1, m_2, L_1, L_2)
% k state number = queue length
% lam input intensity
% m_1 output intensity for 1st mode
% m_2 output intensity for 2nd mode
% L_1 hysteresis control 1st parameter
% L_2 hysteresis control 2nd parameter
r=lam./m_1;
r_1=lam./m_2;
q=L_2-L_1-1;
P_0=(1./(1-r)-((q+1).*r.^(L_1+q).*(r-r_1))./((1-r.^(q+1)).*(1-r_1))).^(-1);
S=P_0./lam.*(r./(1-r).^2 -((q+1).*r.^(L_1+q).*(r-r_1))./((1-r.^(q+1)).*(1-r_1)).*((2.*L_1+q)./2+(1-r.*r_1)./((1-r).*(1-r_1))))-P_0./lam.*(((r-(L_1+1).*r.^(L_1+1)+L_1.*r.^(L_1+2))./(1-r).^2 -(r-r.^(L_1+1))./(1-r))+(r.^(L_1).*(1-r))./(1-r.^(q+1)).*((L_1-1).*(((r-r.^(q+1))./(1-r)-q.*r.^(q+1))./(1-r)+(r.^q.*r_1.*(q-(r_1-r_1.^(q+1))./(1-r_1)))./(1-r_1))+(((r-(q+1).*r.^(q+1)+q.*r.^(q+2))./(1-r).^2 -(r.^(q+1).*q.*(q+1))./2)./(1-r)+(r.^q.*r_1.*((q.*(q+1))./2-(r_1-(q+1).*r_1.^(q+1)+q.*r_1.^(q+2))./(1-r_1).^2))./(1-r_1)))+((1-r_1.^(q+1)).*(1-r).*r.^(L_1+q))./((1-r.^(q+1)).*(1-r_1)).*((r_1.*(L_1+q-1))./(1-r_1)+r_1./(1-r_1).^2));
end

–ис. 12 –еализаци€ функции GisterS и построение графика зависимостей
Ќа рис. 13 показаны графики зависимостей  дл€ исследуемых систем.
дл€ исследуемых систем.

–ис. 13 √рафики зависимостей среднего времени обслуживани€ от интенсивности вход€щего потока запросов дл€ исследуемых систем
Ќа рис. 13 величина  Ц среднее врем€ обслуживани€ дл€ i -й системы. »з графика видно, что при на некотором интервале среднее врем€ обслуживани€ не измен€етс€ и равно приблизительно
Ц среднее врем€ обслуживани€ дл€ i -й системы. »з графика видно, что при на некотором интервале среднее врем€ обслуживани€ не измен€етс€ и равно приблизительно  , так как система работает преимущественно в режиме с первым сервером. ѕри приближении величины к значению среднее врем€ обслуживани€ монотонно убывает и стремитс€ к величине
, так как система работает преимущественно в режиме с первым сервером. ѕри приближении величины к значению среднее врем€ обслуживани€ монотонно убывает и стремитс€ к величине  , так как увеличиваетс€ веро€тность нахождени€ системы в режиме работы со вторым сервером. “акже из графиков видно, что выполн€етс€ соотношение
, так как увеличиваетс€ веро€тность нахождени€ системы в режиме работы со вторым сервером. “акже из графиков видно, что выполн€етс€ соотношение

что соответствует сделанному ранее предположению.
¬ычислим характеристики работы систем, параметры которых определены в таблице 1, дл€ двух заданных значений интенсивности вход€щего потока запросов к серверу . –езультаты вычислений представлены в таблице 2.
“абл. 2

