




Устройства, приборы и системы производственной и пожарной автоматики состоят из отдельных элементов.
Элемент – это конструктивно обособленная часть схемы, устройства или системы, выполняющий определенную функцию. Элементом может быть резистор, конденсатор, трансформатор, клапан и т.д. Несмотря на значительное разнообразие основных функций, выполняемых в разных автоматических системах, общим для элементов автоматики является передача поступающих на них воздействий (сигналов) в определенном направлении, а также то или иное преобразование сигнала по значению, характеру или даже по физической природе. По виду выполняемых функций элементы автоматики можно разделить на следующие основные типы:
1. Датчики, преобразующие различные неэлектрические величины в электрические сигналы.
2. Усилители, усиливающие поступающие на них сигналы, но не изменяющие физической природы этих сигналов.
3. Реле, позволяющие с помощью сравнительно слабых электрических сигналов управлять более мощными электрическими цепями (включать или отключать эти цепи).
4. Стабилизаторы, поддерживающие постоянство выходного напряжения или тока при изменениях входного сигнала или сопротивления нагрузки.
5. Двигатели, преобразующие ту или иную энергию в перемещения (угловые или линейные) и приводящие в действие тот или иной механизм или объект.
6. Распределители, обеспечивающие поочередное подключение различных элементов или электрических цепей к какому-либо одному элементу или к одной точке электрической цепи.
7. Вычислительные элементы, выполняющие математические и логические операции над различными величинами.
8. Корректирующие элементы, улучшающие свойства системы или отдельных ее частей.
9. Исполнительные механизмы, предназначенные для изменения управляемых величин.
10. Командоаппараты, предназначенные для подачи в систему различных воздействий и команд.
Элементы, выполняющие те или иные функции, могут отличаться друг от друга по физическим принципам, лежащим в основе их действия. С этой точки зрения основные элементы автоматики можно разделить на следующие разновидности:
1. Электромеханические, в которых электрическая энергия преобразуется в механическую или, наоборот, механическая – в электрическую.
2. Электротепловые или электротермические, в которых происходит переход электрической энергии в тепловую или тепловой в электрическую.
3. Электромагнитные или ферромагнитные, в основе действия которых лежит электромагнитное явление и используются свойства ферромагнитных материалов.
4. Электронные, к которым относятся электронные лампы, полупроводниковые элементы, фотоэлементы и т.п.
5. Ионные, в которых используются процессы в ионизированных газах (газотроны, тиратроны и др.).
6. Радиоактивные, т.е. используются вещества, обладающие радиоактивным излучением.
7. Пневматические, использующие энергию сжатого воздуха или каких-либо иных газов под давлением.
8. Гидравлические, действие которых основано на использовании энергии жидкости под давлением.
В общем виде элемент (рис. 1.3) представляет собой преобразователь, на вход которого подается сигнал Х вх, а на выходе получается сигнал Х вых. Элементы могут быть пассивными и активными. В пассивных элементах (рис. 1.3, а) отсутствует вспомогательный источник энергии (ВИЭ), в них сигнал Х вых получается за счет сигнала Х вх, а в активных элементах имеется вспомогательный источник энергии (рис. 1.3, б). В этих элементах входная величина только управляет передачей энергии от ВИЭ выходной величине. Если в пассивных элементах в результате потерь выходной сигнал меньше входного, то в активных элементах выходной сигнал может быть и больше входного сигнала, так как в данном элементе возможно усиление сигнала за счет ВИЭ. Величины Х вх и Х вых могут быть как электрическими (ток, напряжение, сопротивление), так и неэлектрическими (давление, скорость, температура, перемещение и т.д.).
 |
Рис. 1.3. Элементы автоматики:
а – пассивный элемент автоматики; б – активный элемент автоматики
Чтобы оценить свойства элементов автоматического устройства, необходимо знать их показатели. В автоматике свойства функциональных элементов оцениваются различными показателями, связанными с входной и выходной величинами. Если входная величина элемента с течением времени не изменяется, режим элемента называется статическим. Если же входная величина элемента изменяется с течением времени, то это сопровождается соответствующим изменением выходной величины. Подобный режим называется динамическим. В соответствии с этим различают статические и динамические показатели элемента. Важнейшим показателем статического режима элемента автоматики является его статическая характеристика, под которой понимается зависимость выходной величины элемента от его входной величины, выраженная графически. Математическое выражение этой зависимости Х вых = f (Х вх) называется уравнением статики элемента. На рис. 1.4 приведены примеры различных статических характеристик элементов. Как видно из рисунка, характеристики могут быть линейными (рис. 1.4, а) и нелинейными (рис. 1.4, б), в соответствии с этим и элементы делятся на линейные и нелинейные. Линейная статическая характеристика есть прямая, проходящая под некоторым углом К к горизонтальной оси. Угол наклона характеристики есть величина постоянная, а его тангенс определяет передаточный коэффициент или коэффициент преобразования:
К = Х вых /Х вх. (1.1)
Передаточный коэффициент является важным показателем элемента. Он может иметь ту или иную разность или быть безразмерной величиной. Применительно к разным функциональным элементам передаточный коэффициент носит разные названия. Так, для датчиков его часто называют чувствительностью, для усилителей – коэффициентом усиления, для стабилизаторов величину, обратную передаточному коэффициенту, – коэффициентом стабилизации.
Линейный элемент обладает постоянным передаточным коэффициентом, тогда как передаточный коэффициент нелинейного элемента в разных точках характеристик различен и характеризуется тангенсом угла наклона касательной, приведенной к нелинейной характеристике в интересующей нас точке. Иногда пользуются понятием дифференциального передаточного коэффициента
К д = D Х вых / D Х вх = dХ вых /dХ вх, (1.2)
где D Х вых и D Х вх– малые изменения выходной и входной величин относительно некоторой точки характеристики.
Для линейного элемента понятия К и К дсовпадают. Уравнение статики элемента, обладающего линейной характеристикой, является алгебраическим уравнением первой степени вида
Х вых = КХ вх,
тогда как нелинейные элементы описываются алгебраическими уравнениями более высоких степеней. Другой важный показатель элемента – его порог чувствительности, под которым понимается минимальное значение входной величины, вызывающее изменение выходной величины. Практически все реальные элементы автоматики обладают тем или иным порогом чувствительности. Статическая характеристика элемента, обладающего порогом чувствительности, не проходит через начало координат, на оси абсцисс получается некоторый отрезок. Такая характеристика показана на рис. 1.4, в. Отрезок А¢–А, численно равный удвоенному значению порога чувствительности 0 А, называется зоной нечувствительности элемента. Если зона нечувствительности невелика и ею можно пренебречь, характеристика элемента может быть линериазована. Такая характеристика на
рис. 1.4, в показана штриховой линией. Возникновение зоны нечувствительности в различных элементах происходит по разным причинам.
 |
Рис. 1.4. Статические характеристики элементов автоматики
В таких элементах, как реле, редукторы, электродвигатели, существуют небольшие изменения входной величины из-за наличия люфта, трения, магнитного гестерезиса и т.п. В других элементах, таких, как датчики, усилители, стабилизаторы, может иметь место нестабильность характеристики, выражающаяся в том, что при неизменном значении входной величины выходная величина самопроизвольно изменяется в некоторых пределах. Самопроизвольное изменение выходной величины элемента при неизменном значении выходной величины может быть также в результате изменения внутренних свойств элемента (старение, износ) или при изменении внешних факторов (температуры, влажности, давления окружающей среды, питающего напряжения и др.). На рис. 1.4, г кривая 1 соответствует первоначальной характеристике элемента, а кривая 2 есть характеристика того же элемента, изменившаяся в результате влияния одного из перечисленных ранее факторов. Как видно, эта нестабильность приводит к погрешностям (см. далее гл.5). Передача сигналов от одного элемента к другому осуществляется посредством связей между ними. Связи могут быть механическими, электрическими, пневматическими, гидравлическими и др. Различают также прямые и обратные связи. Посредством прямых связей сигнал с выхода предыдущего элемента передается на вход последующего.
Под обратными связями понимают связи, посредством которых сигнал с выхода элемента передается на его вход или с выхода одного из последующих элементов передается на вход одного из предыдущих элементов (рис. 1.5). Сигнал, передаваемый по цепи обратной связи, называется сигналом обратной связи Х о.с. Алгебраическое суммирование сигналов принято изображать на структурных схемах специальным условным знаком. Обратные связи могут охватывать и всю систему в целом, т.е. передавать сигналы с выхода системы обратно на ее вход. Такие обратные связи называют главными, в отличие от местных, охватывающих отдельные элементы или часть системы.
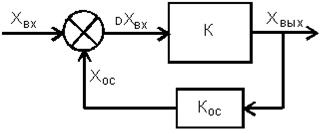
Рис. 1.5. Обратные связи
Величина К о.с, показывающая, какая часть выходного сигнала V поступает обратно на вход в виде сигнала обратной связи Х о.с, называется коэффициентом обратной связи:
К о.с = Х о.с /Х вых . (1.3)
Обратные связи делятся на положительные и отрицательные. Положительными считаются такие обратные связи, когда сигнал обратной связи складывается с входным сигналом, т.е.
D Х вх = Х вх +Х о.с . (1.4)
Если же входной сигнал и сигнал обратной связи вычитаются, обратная связь называется отрицательной. В этом случае
D Х вх = Х вх - Х о.с. (1.5)
В общем случае сигнал, поступающий на вход элемента при наличии обратной связи,
D Х = Х вх ± Х о.с. (1.6)
Если сигнал обратной связи и выходной сигнал к входу элемента подключены параллельно, обратная связь называется параллельной. При последовательном подключении входного сигнала и сигнала обратной связи последняя называется последовательной. Обратные связи действуют, т.е. передают сигналы, как в установившихся, так и в переходных процессах и называются соответственно жесткими и гибкими обратными связями.
Различные обратные связи по-разному влияют на свойства охватываемых ими элементов. При наличии обратной связи сигнал на входе элемента выражается уравнением (1.6), где на основании формулы (1.3)
Х о.с = К о.с Х вых.
Поэтому уравнение элемента, охваченного обратной связью, может быть записано в виде
Х вых = К (Х вх± К о.с Х вх ), (1.7)
где К – передаточный коэффициент элемента без обратной связи.
Раскрывая скобки и группируя член с Х вых слева, а члены с Х вх справа, получаем
Х вых = [ К/ (1± К о.с К)] Х вх. (1.8)
Член K/ (1± K ос К) представляет собой передаточный коэффициент элемента, охваченного обратной связью. Введем обозначение
К/ (1± К о.с К) = К. (1.9)
В знаменателе этого выражения знак минус соответствует положительной, а знак плюс – отрицательной обратной связи. Отсюда следует, что положительная обратная связь увеличивает передаточный коэффициент элемента, а отрицательная уменьшает. Произведение К о.с К называют фактором обратной связи, а двучлен 1± К о.с – глубиной обратной связи. В плане практических рекомендаций следует иметь в виду, что положительная обратная связь увеличивает не только передаточный коэффициент охватываемого элемента, но в такой же степени увеличивает возникающие в элементе погрешности и искомые сигналы, влияние помех и собственных шумов, ухудшает стабильность передаточного коэффициента. Отрицательная же обратная связь наряду со снижением передаточного коэффициента во столько же раз снижает влияние на сигнал помех, уменьшает искажение сигнала, повышает стабильность передаточного коэффициента, т.е. улучшает основные показатели элемента.
Для автоматических систем характерно наличие сигналов, изменяющихся с течением времени. При этом как входные величины, так и выходные для элементов и системы в целом не остаются постоянными. Такое состояние системы называем динамическим, а показатели, характеризующие поведение элементов в динамическом режиме, – показателями динамики элемента или его динамическими показателями. Процесс, протекающий в элементе при изменении его входной величины, называется переходным процессом. Поведение элемента в этом случае описывается дифференциальным уравнением того или иного порядка. Важнейшим динамическим показателем элемента автоматики является его динамическая характеристика, под которой понимается изменение выходной величины элемента с течением времени. Следует, однако, иметь в виду, что характер изменения выходной величины элемента зависит не только от свойств самого элемента, но и от характера изменения его входной величины. Чтобы можно было сравнивать динамические свойства различных элементов, пользуясь их динамическими характеристиками, следует подавать в ходе этих элементов сигналы, имеющие одинаковый характер, т.е. одинаково изменяющиеся с течением времени.
Общепринято в качестве таких сигналов использовать:
единичный скачок внешнего воздействия, представляющий собой функцию времени, которая отличается скачкообразным изменением в момент времени t = 0 и сохраняет свое постоянное значение при t > 0
(рис. 1.6, а);
единичный импульс внешнего воздействия, который представляет собой скачкообразно изменяющуюся функцию времени с бесконечно малой длительностью скачка (t ®0) (рис. 1.6, б);
гармоническое воздействие и воздействие непрерывно возрастающее с постоянной скоростью (рис. 1.6, в, г).
Чаще других для исследования динамических характеристик элементов автоматики используется единичная функция. Такой сигнал позволяет выявить и оценить количественно важное свойство элемента – его инерционность, т.е. наличие некоторого запаздывания в изменении выходного сигнала по сравнению с изменением сигнала на входе элемента.
Зависимость Х вых= f (t) при изменении входного сигнала Х вх, выраженная графически, называется графиком переходного процесса элемента. Эта кривая является графической интерпретацией решения дифференциального уравнения элемента, в котором входная и выходная величины являются функциями времени t. Разные элементы автоматики могут иметь различные графики переходных процессов (рис. 1.7). Переходный процесс, показанный на рис. 1.7, а, говорит о том, что элемент не обладает инерционностью, т.е. выходной сигнал изменяется одновременно с изменением входного сигнала без какого бы то ни было запаздывания.

Рис. 1.6. Типовые внешние воздействия

    |
Рис. 1.7. Переходные процессы в элементах автоматики
Элемент, переходный процесс которого показан на рис. 1.7, б, обладает инерцией, вследствие чего его выходная величина Х вых нарастает постепенно после скачкообразного изменения (нарастания) входной величины Х вх. Степень инерционности элемента оценивают постоянной времени Т элемента. Если кривая Х вых = f (t) является экспонентой, то значение постоянной времени соответствует абсциссе точки а и пересечения касательной к экспоненте 0 а с установившимся значением выходной величины Х вых. уст. Постоянная времени Т является одним из важнейших динамических показателей элемента. На рис. 1.7, в показан колебательно-затухающий переходный процесс, при котором выходная величина Х вых совершает ряд колебаний около установившегося значения Х вых. уст с постоянной частотой f 0 = 1/ T 0, где Т 0– период колебаний с непрерывно убывающей амплитудой.
Колебательная частота f 0 или круговая частота W 0 называются частотой собственных колебаний элемента. Она зависит от внутренних свойств элемента и является важным показателем его динамических свойств. Время t уст, в течение которого выходной сигнал достигает значения, незначительно отличающегося от Х вых на величину D Х вых, оговоренную техническими условиями элемента t уст, называется временем установления или длительностью переходного процесса. В отдельных случаях входная величина Х вх может изменяться периодически, например в элементах пожарной автоматики, вследствие чего и выходная величина Х вых может меняться периодически (рис. 1.7, г). В этих случаях инерционность элемента сказывается на значении фазового сдвига кривой Х вых = f (t) относительно кривой Х вх = f (t).
Исследование переходных процессов элементов автоматики дает возможность установить и его динамические погрешности. Переходная характеристика элемента может быть получена экспериментально. Для этого входную величину изменяют скачкообразно, и с помощью регистрирующего устройства (осциллографа или самописца) записывают выходную величину, т.е. получают ее график Х вых = f (t).

