




“≈’ЌќЋќ√»„≈— »… ќЋЋ≈ƒ∆ є 24
(√јќ” —ѕќ “ є24)
“≈—“ќ¬џ≈ «јƒјЌ»я
к комплексному экзамену по дисциплинам:
≈Ќ.01 ћатематика
≈Ќ.02. »нформационные технологии в профессиональной де€тельности
специальность 080114 Ёкономика и бухгалтерский учет
ћосква
2013г.
ритерии оценок
–абота состоит из 4 заданий.
–ешение каждого задани€ состоит из нескольких успешных шагов, ведущих к правильному ответу. ажда€ задача оцениваетс€ провер€ющим преподавателем в зависимости от числа успешно выполненных шагов в баллах с учетом веса задачи. ќбучающийс€ может набрать 6 баллов, решив все задачи.
Ѕаллы за задани€ распредел€ютс€ следующим образом:
| 1б | 2б | 2б | 1б |
| —одержани€ критери€ | Ѕалл |
| ќбоснованно получен правильный ответ. | |
| ќтвет получен, решение в целом верное, но либо недостаточно обоснованное, либо содержит вычислительные погрешности, в результате которых ответ может быть неверным. | |
| –ешение не соответствует ни одному из критериев, перечисленных выше |
| оличество баллов | ќтметка |
| 5-6 | |
| 2-3 | |
| 0-1 |
ћј“≈ћј“» ј
вариант 1
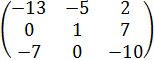
«адача є 1. –ешить уравнение
 = 0
= 0
¬арианты ответов:
1) 9; 2) 3; 3) -9; 4) 27
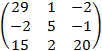
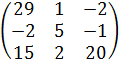
«адача є 2. ¬ычислить 3ј - ¬т

¬арианты ответов:
1) 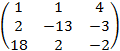 ; 2)
; 2) 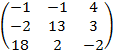 ; 3)
; 3)  ; 4)
; 4) 
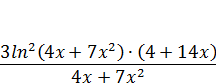
«адача є 3. ¬ычислить производную функции

¬арианты ответов:
1) -4cos3(8x3+1)∙sin(8x3+1)∙24x2; 2)-4cos3(8x3+1)∙sin(8x3+1)∙(24x2+1);
3) 4cos(8x3+1)∙sin3(8x3+1)∙24x2; 4) 4cos3(8x3+1)∙sin(8x3+1)∙24x2
«адача є 4. ƒл€ заданных комплексных чисел z1 и z2 найти 2z2 - z1, если
z1 = 2 + 3i, z2 = 1+ i
¬арианты ответов:
1) 3+5i; 2)-3+5i; 3) 3-5i; 4) -3-5i
ќтветы к тестовым задани€м по дисциплине
ћатематика (вариант 1)
| Ќомер задани€ | |||||
| ¬ариант ответа | |||||
| ќтвет | - 9 |
| -4cos3(8x3+1)∙sin(8x3+1)∙24x2 | 3+5i | |
вариант 2
«адача є 1. –ешить уравнение
 = 0
= 0
¬арианты ответов:
1) 6; 2) -6; 3) -2; 4) 3
«адача є 2. ¬ычислить -2ј + ¬т

¬арианты ответов:
1)  ; 2)
; 2) 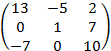 ; 3)
; 3)  ; 4)
; 4) 
«адача є 3. ¬ычислить производную функции

¬арианты ответов:
1) 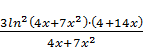 ; 2)
; 2)  ; 3)
; 3) 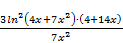 ; 4)
; 4) 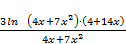
«адача є 4. ƒл€ заданных комплексных чисел z1 и z2 найти -3z2 + z1, если
z1 = 5 + 2i, z2 = -3 + 7i
¬арианты ответов:
1) 14+19i; 2) 14-9i; 3) -14-19i; 4) 14-19i
ќтветы к тестовым задани€м по дисциплине
ћатематика (вариант 2)
| Ќомер задани€ | |||||
| ¬ариант ответа | |||||
| ќтвет | - 6 |
| 
| 14-19i | |
вариант 3
|
|
|
«адача є 1. –ешить уравнение
 = 0
= 0
¬арианты ответов:
1) -13; 2) 3; 3) 23; 4) 13
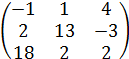
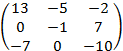
«адача є 2. ¬ычислить 4ј - ¬т

¬арианты ответов:
1)  ; 2)
; 2)  ; 3)
; 3) 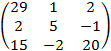 ; 4)
; 4) 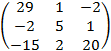
«адача є 3. ¬ычислить производную функции

¬арианты ответов:
1)-7sin6(x5-e3x)∙cos(x5-e3x)∙(5x4 -3e3x); 2) 7sin(x5-e3x)∙cos(x5-e3x)∙(5x4 -e3x);
3) 7sin6(x5-e3x)∙cos(x5-e3x)∙(5x4 -3e3x); 4) 7sin6(x5-e3x)∙(5x4 -3e3x)
«адача є 4. ƒл€ заданных комплексных чисел z1 и z2 найти 3z2-z1, если
z1 = 2 - 2i, z2 = 8 Ц i
¬арианты ответов:
1) -22- i; 2) 2+ i; 3) 22+ i; 4) 22- i
ќтветы к тестовым задани€м по дисциплине
ћатематика (вариант 3)
| Ќомер задани€ | |||||
| ¬ариант ответа | |||||
| ќтвет |
| 7sin6(x5-e3x)∙cos(x5-e3x)∙(5x4-e3x) | 22- i | ||
»Ќ‘ќ–ћј÷»ќЌЌџ≈ “≈’ЌќЋќ√»» ¬ ѕ–ќ‘≈——»ќЌјЋ№Ќќ… ƒ≈я“≈Ћ№Ќќ—“»
ритерии оценок
Ђ”довлетворительної - 55 до 70% правильных ответов.
Ђ’орошої - 71 до 85% правильных ответов.
Ђќтличної - более 86% правильных ответов.
вариант 1
1. »нформацию, изложенную на доступном дл€ получател€ €зыке называют:
а) полной;
б) полезной;
в) актуальной;
г) пон€тной
д) а), г)
2. »нформацию, отражающую истинное положение вещей, называют:
а) полной;
б) полезной;
в) актуальной;
г) достоверной;
д) нет правильных ответов
¬ какой из последовательностей единицы измерени€ указаны в пор€дке возрастани€
а) гигабайт, килобайт, мегабайт, байт;
б) гигабайт, мегабайт, килобайт, байт;
в) мегабайт, килобайт, байт, гигабайт;
г) байт, килобайт, мегабайт, гигабайт.
д) гигабайт, мегабайт, байт

