ѕрописываем путь к папке с тестами
addpath D:\trenag
запускаем тест командой
tr_PID

ќ––≈ ÷»я ќЌ“”–ј — —“ј“»„≈— »ћ ќЅЏ≈ “ќћ ”ѕ–ј¬Ћ≈Ќ»я
ƒл€ придани€ контуру астатизма по управлению используютс€ интегральные регул€торы: » ѕ» и ѕ»ƒ.
–азличаютс€ возможности интегрального (»), пропорционально-интегрального (ѕ») и
пропорционально-интегрального-дифференциального (ѕ»ƒ) регул€торов.
ѕроизводим сравнение коррекции »-регул€тором, ѕ»-регул€тором и ѕ»ƒ-регул€тором.
ќдинаковым дл€ трЄх видов коррекции делаем запас устойчивости по фазе разомкнутого контура управлени€,
чтобы обеспечить одинаковое перерегулирование процессов в замкнутом контуре управлени€ объектом.
онтура управлени€ будут различатьс€ быстродествием при обинаковом качестве переходных характеристик.
ѕараметры регул€торов расчитывают под наибольшее быстродействие (частоту среза) с заданным перерегулированием.
ќЅЏ≈ “ ”ѕ–ј¬Ћ≈Ќ»я
Warning: Size vector should be a row vector with integer elements.
> In rlax at 10
In tr_PID at 53
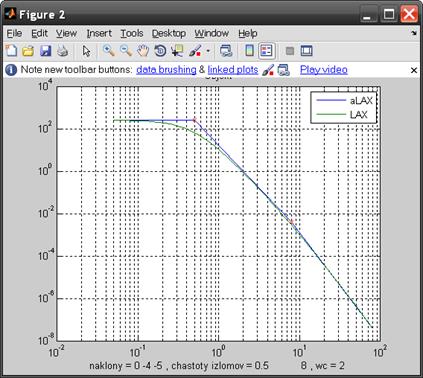
јссимптотическа€ Ћј’ объекта управлени€ имеет наклоны 0 -4 -5
с изломами на частотах 0.5 8
и частотой среза wc = 2
_ _ _ _ _ _ _ _
—татический оэффициент усилени€ объекта = 256 (это наш 0 из расчета). ѕередаточна€ функци€ объекта управлени€ =
Zero/pole/gain:
---------------
(s+0.5)^4 (s+8)
Ќули, полюсы и коэффициент zpk-формы ѕередаточной функции объекта управлени€ =
z =
Empty matrix: 0-by-1
ps =
-8.0000
-0.5000
-0.5000
-0.5000
-0.5000
k =
ќбъект, naklony = 0 -4 -5, chastoty izlomov = 0.5 8, wc = 2
ѕ»ƒ- регул€тор имеет два нул€ (корн€ полинома числител€) и два полюса (корн€ полинома знаменател€).
—воими нул€ми ѕ»ƒ- регул€тор может компенсирует два полюса объекта управлени€.
“еоретически омпенсируемые полюсы объекта могут быть положительными, т.е. неустойчивыми. ѕрактически - нет.
ќбычно компенсируют самые малые полюсы, как наиболее инерционные, тормоз€щие процессы управлени€.
ѕусть ограничение подъЄма усилени€ дифференциальной составл€ющей закона управлени€ = 10
«јƒјЌ»≈ ќћѕ≈Ќ—»–”≈ћџ’ ѕќЋё—ќ¬
ѕ»ƒ-регул€тор компенсирует самую большую посто€нную времени “1 = 2 C, а следующую за ней “2 = 2 — уменьшает в 10 раза
ѕ»-регул€тор компенсирует лишь одну, самую большую посто€нную времени “1 = 2 C, так как имеет лишь один нуль.
»-регул€тор нулей не имеет и средств дл€ компенсации у него нет.
–ј—„®“ ќ—Ќќ¬Ќќ√ќ ѕј–јћ≈“–ј ќЌ“”–ј ”ѕ–ј¬Ћ≈Ќ»я
«адаЄмс€ желаемым перерегулированием <= 5 % переходной характеристики контура управлени€ с каждым регул€тором.
» соответствующим ему коеффициентом ke = 0.5 смещени€ частоты среза относительно частоты суммарной инерционности объекта.
—уммарные инерционности = [8.125 6.125 4.325] (это наше Tsum) C нескомпенсированных полюсов контуров управлени€ с », ѕ», ѕ»ƒ-регул€тором.
|
|
|
∆елаемые частоты среза (и коэффициенты усилени€)= [0.061538 0.081633 0.11561] (это наше находим желаемую частоту среза wcj) 1/C разомкнутых контуров управлени€ с », ѕ», ѕ»ƒ-регул€тором
–≈√”Ћя“ќ–џ
ѕередаточна€ функци€ (zpk-форма) »-регул€тора =
Zero/pole/gain:
0.00024038
----------
s
ѕередаточна€ функци€ (zpk-форма) ѕ»-регул€тора =
Zero/pole/gain:
0.00063776 (s+0.5)
------------------
s
ѕередаточна€ функци€ (zpk-форма) ѕ»ƒ-регул€тора =
Zero/pole/gain:
0.0090318 (s+0.5)^2
-------------------
s (s+5)
(это наша передаточна€ функци€ Wpid (s) в zpk-форме)
ѕередаточна€ функци€ (tf-форма) ѕ»ƒ-регул€тора =
Transfer function:
0.009032 s^2 + 0.009032 s + 0.002258
------------------------------------
s^2 + 5 s
ќЌ“”–ј ”ѕ–ј¬Ћ≈Ќ»я –ј«ќћ Ќ”“џ≈
„астота среза = 0.059805 1/C, запас по фазе = 62.2886 гр. разомкнутого контура управлени€ с »-регул€тором. W(s) =
Zero/pole/gain:
0.030769
-----------------
s (s+0.5)^4 (s+8)
„астота среза = 0.078674 1/C, запас по фазе = 62.6103 гр. разомкнутого контура управлени€ с ѕ»-регул€тором. W(s) =
Zero/pole/gain:
0.081633
-----------------
s (s+0.5)^3 (s+8)
Zero/pole/gain:
1.1561
-----------------------
s (s+0.5)^2 (s+5) (s+8)
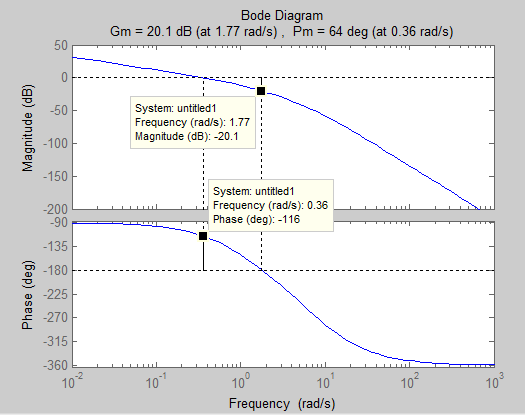
„астота среза = 0.11016 1/C, запас по фазе = 63.0985 гр. разомкнутого контура управлени€ с ѕ»ƒ-регул€тором. W(s) =
Zero/pole/gain:
1.1561
-----------------------
s (s+0.5)^2 (s+5) (s+8)
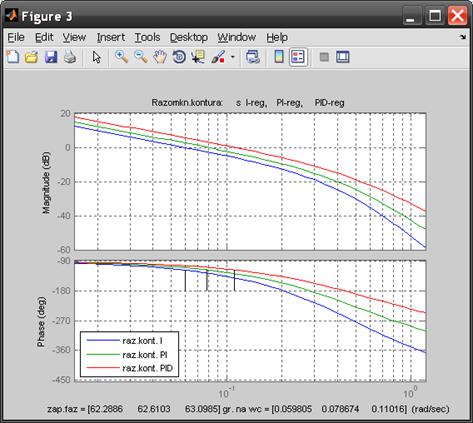
«апасы по фазе = [62.2886 62.6103 63.0985] гр. близки за счЄт разных wc = [0.059805 0.078674 0.11016] 1/C, контуров управлени€ с », ѕ», ѕ»ƒ-регул€тором.
ќЌ“”–ј ”ѕ–ј¬Ћ≈Ќ»я «јћ Ќ”“џ≈
ѕередаточна€ функци€ замкнутого контура управлени€ с »-регул€тором =
Zero/pole/gain:
0.030769
------------------------------------------------------------------
(s+8) (s+0.7725) (s^2 + 0.1625s + 0.01364) (s^2 + 1.065s + 0.3651)
ѕередаточна€ функци€ замкнутого контура управлени€ с ѕ»-регул€тором =
Zero/pole/gain:
0.081633
-------------------------------------------------------
(s+8) (s^2 + 0.2062s + 0.02212) (s^2 + 1.294s + 0.4613)
ѕередаточна€ функци€ замкнутого контура управлени€ с ѕ»ƒ-регул€тором =
Zero/pole/gain:
1.1561
--------------------------------------------------------
(s+8.001) (s+4.996) (s+0.7263) (s^2 + 0.2767s + 0.03982)
ћаксимум ј„’ замкнутого контура с », ѕ», ѕ»ƒ-регул€тором, M = [1 1 1] на частоте wm = [0 0 0] 1/C
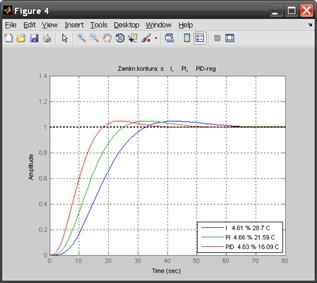
ƒлительность h(t) = [28.7 21.59 16.09] —, относительно суммарной инерционности = [3.5323 3.5249 3.7202] дл€ контуров с », ѕ», ѕ»ƒ-регул€тором,
ќЁ‘‘»÷»≈Ќ“џ » —ќ—“ј¬Ћяёў»≈ ѕ»ƒ-–≈√”Ћя“ќ–ј
ќбнуленных нулей = 2
оэффициенты ѕ»ƒ регул€тора: пропорциональный kP = 0.001716, интегральный kI = 0.00045159 (это наш коэффициент интегральный Ki) 1/—, дифференциальный kD = 0.0014632 C
омпенсируемые полюса объекта как отношени€ коэффициентов: -kI/kP = -0.5, -kP/kD = -0.5
ѕередаточные функции компонентов ѕ»ƒ-регул€тора: ѕропорциональной = 0.001716, »нтегральной =
Transfer function:
0.0004516
---------
s
ƒифференциальной =
Zero/pole/gain:
0.0073158 s
-----------
(s+5)
- - - - - - - - - - - - - - - - - -
ћ»Ќ»ћ»«ј÷»я ƒЋ»“≈Ћ№Ќќ—“» ѕ≈–≈’ќƒЌќ… ’ј–ј “≈–»—“» » » ƒ–”√»’ ѕќ ј«ј“≈Ћ≈… ј„≈—“¬ј ”ѕ–ј¬Ћ≈Ќ»я
|
|
|
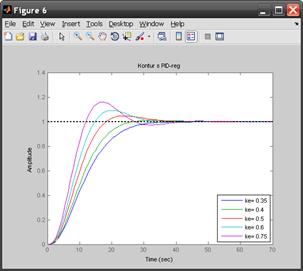
¬ј–№»–”≈ћ ѕј–јћ≈“– ke ќЌ“”–ј ”ѕ–ј¬Ћ≈Ќ»я
ќЌ“”– ”ѕ–ј¬Ћ≈Ќ»я — ѕ»ƒ-–≈√”Ћя“ќ–ќћ
относительный коэффициент ke 0.35 0.4 0.5 0.6 0.75
частота среза разомк.контура 0.07892044 0.08957145 0.1101628 0.1298598 0.1576205
запас по фазе разомк.контура 70.59127 68.01942 63.09847 58.46395 52.07169
перерегулирование (в %) 0.12 1.03 4.63 9.08 16
длительность h(t) 5% трубку 25.34 20.64 16.09 25.46 23.63
длительность h(t) 1% трубку 32.19 33.46 34.47 30.39 38.17
показатель колебательности ћ 1 1 1 1.030675 1.139509
I1 = интеграл{t*|е(t)|}dt 101.0032 80.07521 65.23106 62.10055 64.79587
I2 = интеграл{е(t)^2}dt 8.924494 8.204782 7.233078 6.628516 6.097149
ѕриведенные в таблице данные следует использовать дл€ оптимизации контура управлени€ с ѕ»ƒ-регул€тором.
ћинимальное врем€ = 16.09 — вхождени€ процесса в 5 % трубку достигаетс€ при перерегулировании = 4.63 % и ke = 0.5,
на скачЄк координаты установивше€с€ ошибка = 0, на скачЄк скорости - ошибка = 9.0775, или 907.75 % величины скачка.
ћинимальное врем€ = 30.39 — вхождени€ процесса в 1 % трубку достигаетс€ при перерегулировании = 9.08 % и ke = 0.6,
на скачЄк координаты установивше€с€ ошибка = 0, на скачЄк скорости - ошибка = 7.7006, или 770.06 % величины скачка.
ћинимум показател€ колебательности ћ = 1 достигаетс€ при перерегулировании <= 4.63 % и ke <= 0.5.
ћинимум (модульной, умноженной на врем€) интегральной оценки I1 = 62.1006 достигаетс€ при перерегулировании = 9.08 % и ke = 0.6.
ћинимум квадратичной интегральной оценки I2 достигаетс€ вблизи границы устойчивости, и категорически не рекомендуетс€ еЄ использовать дл€ оптимизации.
ћ»Ќ»ћ”ћ ѕ≈–≈’ќƒЌќ… ’ј–ј “≈–»—“» » ќѕ–≈ƒ≈Ћя≈“—я —”ћћј–Ќќ… »Ќ≈–÷»ќЌЌќ—“№ё = 4.325 — Ќ≈— ќћѕ≈Ќ—»–ќ¬јЌЌџ’ ѕќЋё—ќ¬ ќЌ“”–ј ”ѕ–ј¬Ћ≈Ќ»я.
ћ»Ќ»ћ”ћ ѕ≈–≈’ќƒЌќ… ’ј–ј “≈–»—“» » = 16.09 — «ј¬»—»“ “ќЋ№ ќ ќ“ ƒ»‘‘≈–≈Ќ÷»јЋ№Ќќ… —ќ—“ј¬Ћяёў≈…, ”ћ≈Ќ№Ўјёў≈… ѕќ—“ќяЌЌ”ё ¬–≈ћ≈Ќ» ќЅЏ≈ “ј ¬ 10 –ј«.
ƒјЋ№Ќ≈…Ў≈≈ ”ћ≈Ќ№Ў≈Ќ»≈ ѕ≈–≈’ќƒЌќ… ’ј–ј “≈–»—“» » ¬ќ«ћќ∆Ќќ ƒќѕќЋЌ»“≈Ћ№Ќџћ ѕƒ-–≈√”Ћя“ќ–ќћ, ”ћ≈Ќ№Ўјёў»ћ ≈ў® ќƒЌ” ѕќ—“ќяЌЌ”ё ¬–≈ћ≈Ќ» ќЅЏ≈ “ј.
“еперь по графикам. ¬ идеале графики из теста tr_PID и программы из расчета вручную (если расчитано верно) должны совпасть, как и значени€, выделенные пр€моугольниками. Ќа первом графике это красна€ лини€ (raz. Kont. PID) Ќужно учитывать тот факт, что на графиках разный масштаб.




Ёти графики тоже совпадают с красным из tr_PID (PID и ke=0.5). горб над единичной пунктирной линией означает наше перерегулирование в 5%, которое мы задавали в исходных данных. ѕри ke=0.35 (перерегулирование в 0%) график плавно стремитьс€ к единичному уровню усилени€. „ем выше перерегулирование, тем выше ke и выше горб.


ƒополнено!
—н€ть параметры c графиков дл€ препода можно так (сделано на основе других графиков):
ѕосле написание проги по вашим расчЄтам вылезут 2 фигуры
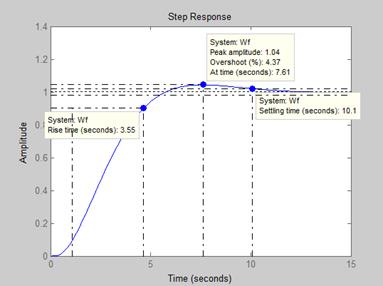
“ам, где переходна€ характеристика с перерегулированием, первый график:
¬ матлабе правой кнопкой клик -> Characteristics -> Peak Response
ѕо€витс€ син€€ точка, на ней левый клик, по€в€тс€ параметры в пр€моугольнике:
Overshoot = перерегулирование
ƒлительность переходного процесса = врем€ (снизу) на амплитуде (слева) до уровн€ 1+0.05 или 1-0.05. Ёто из теории. »ли правый клик, Characteristics -> Setting Time. но матлаб криво как-то показывает, не по тем пределам)
“ам есть еще врем€ насыщени€ (врем€ процесса до уровн€ 0.9 по амплитуде) (ѕ ћ, Characteristics -> Rise time)

¬тора€ фигура:
–асставл€ем точки над пересечением вертикальной пунктирной линией и графиком, нажимаем на точки, вылезут пр€моугольники с параметрами. ѕараметры должны совпасть со сорокой над фигурой, там усиление с частотой и запас по фазе с частотой (с фазой горизонтальный пунктир на -180∞, значит 180∞-116∞=64∞ = совпадает!)