




ќ“„≈“ ѕќ ЋјЅќ–ј“ќ–Ќќ… –јЅќ“≈ є5
ƒисциплина: ћатематическое моделирование объектов и систем управлени€
“ема: јнализ динамики приводных систем звеньев роботов на примере электроприводов с типовыми регул€торами с помощью функций библиотеки Control System Toolbox
| ¬ыполнили студенты группы 13345/2 | __________________ ¬.¬. ¬арлашин __________________ ј.ё. ¬олков |
| ѕреподаватель | __________________ Ќ.¬. –остов |
—анкт-ѕетербург 2016
«адача
јнализ характеристик двигател€ посто€нного тока (ƒѕ“) по его передаточной функции, исследование частотных характеристик.
»сходные данные
ѕередаточна€ функци€ ƒѕ“
ѕараметры ƒѕ“:
е Ц коэффициент противоЁƒ— двигател€ (конструктивный параметр)
“а Ц электрическа€ посто€нна€ времени
“м Ц механическа€ посто€нна€ времени, “м = (RaJ)/(KeKm)
m Ц электромеханическа€ посто€нна€ двигател€ (конструктивный параметр)
J Ц момент инерции на валу вигател€
Rа Ц сопротивление обмоток €кор€

–исунок 1 Ц —труктурна€ схема контура тока
сп Ц коэффициент передачи силового преобразовател€
“сп Ц посто€нна€ времени силового преобразовател€
Ua Ц максимальное напр€жение €кор€
дт Ц коэффициент передачи датчика тока
ωmax Ц максимальна€ скорость двигател€
ѕередаточна€ функци€ регул€тора тока
“рт и ртЦ параметры регул€тора тока

–исунок 2 Ц —труктурна€ схема контура скорости
ѕередаточна€ функци€ регул€тора скорости
“рс и рсЦ параметры регул€тора скорости
¬ыполнение работы
ѕостроение частотных характеристик дл€ ƒѕ“ при трех различных значени€х момента инерции на валу двигател€
%«адача: построить характеристики ƒѕ“ при J={J1,J2,J3}
close all;clc;clear all;
Ra=10; %ќм
Ta=0.01;
Ke=0.05; %¬с/рад
Km=Ke;Ќм/ј
J=0.5E-5; % первое значение момента инерции, кгм^2
% J=1.5E-5; % второе значение момента инерции
% J=3E-5; % третье значение момента инерции
Tm=(J*Ra)/(Ke*Km);
DC_Motor=tf(1/Ke,[Tm*Ta Tm 1]);
figure(1);
subplot(1,2,1);bode(DC_Motor,{10, 10000});grid on;hold on
subplot(1,2,2);step(DC_Motor,0:0.0005:0.5);grid on;hold on;
¬ывод по пункту 1
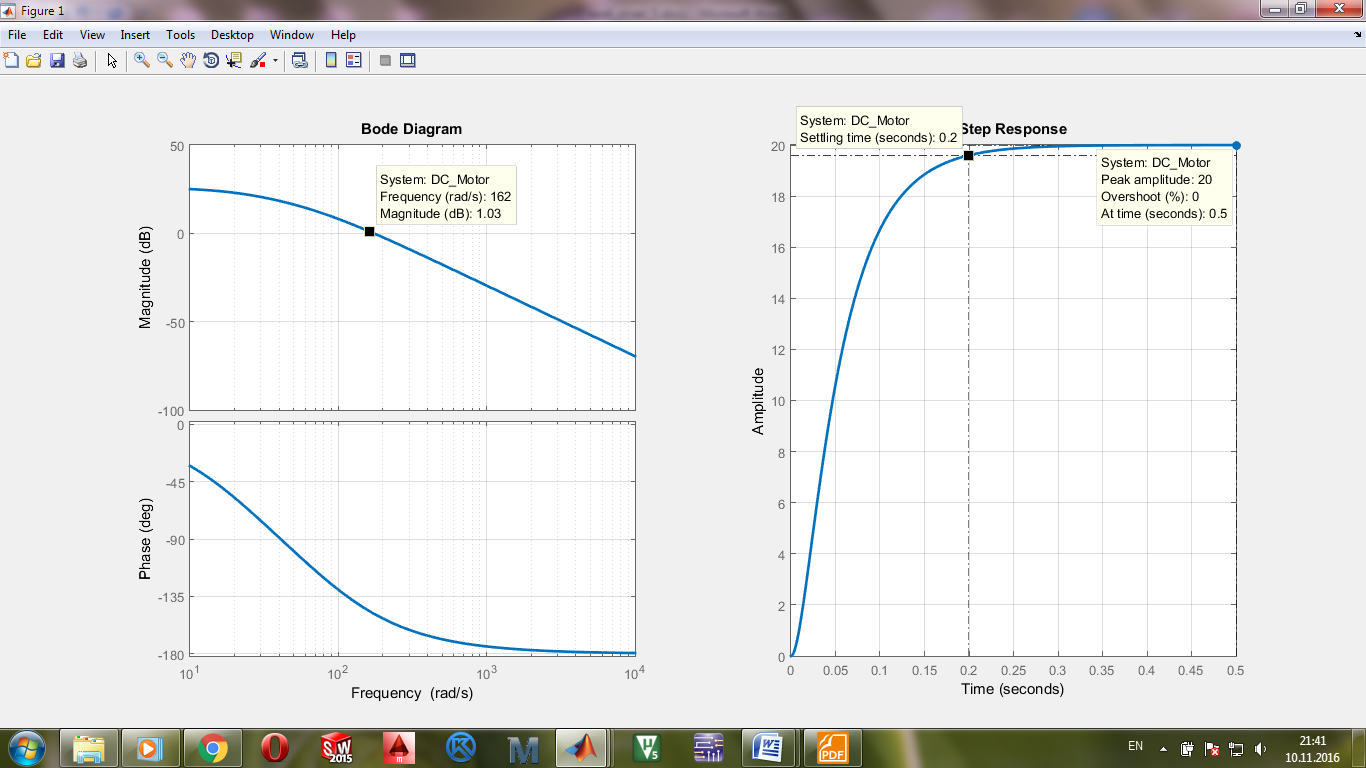
–езультаты моделировани€ (см. рисунки 3-5) показывают, что при различных моментах инерции на валу электродвигател€ переходные процессы имеют разные частоты среза, а так же переходные характеристики. — увеличением момента инерции на валу двигател€ переходные процессы зат€гиваютс€, исчезает колебательность, частота среза уменьшаетс€ (рисунки 4 и 5).

–исунок 3 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при J=0.5E-5кгм^2
–исунок 4 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при J=1.5E-5кгм^2

–исунок 5 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при J=3E-5кгм^2
2. ѕостроение частотных характеристик дл€ контура тока ( “) с пропорционально-интегральным регул€тором тока (ѕ»-–“) дл€ J= 1.5E-5кгм^2.
Ksp=3;% оэффициент передачи силового преобразовател€
Tsp=0.001;% ѕосто€нна€ времени силового преобразовател€
|
|
|
Kdt=10/3;% оэффициент передачи датчика тока, ¬/ј
Trt=Ta; % ѕосто€нна€ времени регул€тора тока
Krt=1; % настраиваемый коэффициент
%Krt=10;
%Krt=5;
Plant_KT=tf(Ksp,[Tsp 1])*tf(1/Ra,[Ta 1])*Kdt%ќбъект контура тока
PI_RT=Krt*tf([Trt 1],[Trt 0])%ѕ» регул€тор тока
KT_open=PI_RT*Plant_KT%ћодель контура тока в разомкнутом состо€нии
figure(2);subplot(1,2,1);bode(KT_open,{10, 100000});grid on;
KT_closed=feedback(KT_open,1);
subplot(1,2,2);step(KT_closed,0:0.0001:0.1);grid on;
¬ывод по пункту 2
–езультаты моделировани€ (см. рисунки 6-8) показывают, что c увеличением коэффициента пропорциональной составл€ющей регул€тора тока переходные процессы ускор€ютс€, по€вл€етс€ колебательность, частота среза увеличиваетс€ (рисунки 7 и 8). Ќа рисунке 6 подобрано оптимальное значение пропорциональной составл€ющей регул€тора тока, обеспечивающее перерегулирование в размере 4,29 %, что соответствует настройке контура тока по модульному оптимуму.

–исунок 6 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при Krt = 1

–исунок 7 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при Krt = 10

–исунок 8 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при Krt = 4.99
3. ѕостроение частотных характеристик дл€ контура скорости ( C) с пропорционально-интегральным регул€тором скорости (ѕ»-–—) дл€ момента инерции J= 1.5≈Ц5кгм^2
Tkt=2*Tsp; % ѕосто€нна€ времени контура тока
Trs=4*Tkt; % ѕосто€нна€ времени контура скорости
Kds=10/600; % оэффициент обратной св€зи по скорости, ¬с/рад
Krs=1;%Ќастроить
%Krs=10;
%Krs=15;
Plant_KS=tf(1/Kdt,[Tkt 1])*Km*tf(1,[J 0])*Kds%ќбъект контура скорости
PI_RS=Krs*tf([Trs 1],[Trs 0])
KS_open=PI_RS*Plant_KS
figure(3);subplot(1,2,1);bode(KS_open,{10,10000});grid on;
KS_closed=feedback(KS_open,1);
subplot(1,2,2);step(KS_closed,0:0.001:0.1);grid on;
¬ывод по пункту 3
–езультаты моделировани€ (см. рисунки 9-11) показывают, что c увеличением коэффициента пропорциональной составл€ющей регул€тора тока переходные процессы ускор€ютс€, уменьшаетс€ перерегулирование Ќа рисунке 11 подобрано оптимальное значение пропорциональной составл€ющей регул€тора тока, обеспечивающее перерегулирование в размере 42.2 %., что соответствует настройке переходного процесса по симметричному оптимуму.

–исунок 9 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при Krs = 1

–исунок 10 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при Krs = 10

–исунок 11 Ц ј„’/‘„’ (слева) и переходна€ характеристика ƒѕ“ при Krs = 15.
¬ывод
»сследованы переходные процессы, протекающие в модел€х ƒѕ“, а так же построены переходные характеристики двигател€, его контуров управлени€ ѕ»-–— и ѕ»-–“ »з результатов проведЄнной работы видно, что при увеличении момента инерции процессы станов€тс€ зат€нутыми, без перерегулировани€, возрастает врем€ переходного процесса. ¬ыполнена настройка параметров ѕ»-–— и ѕ»-–“, подобраны значени€, соответствующие симметричному оптимуму и модальному оптимуму.

