




ѕодготовительный этап 1.1.
ѕерейти от записи системы в виде передаточной функции к записи в виде уравнений состо€ни€: Ц аналитический
0,04 *  + 0,44 *
+ 0,44 *  + y(t) = 6*x(t)
+ y(t) = 6*x(t)

 =
= 
 +
+ 
y = |0 1|
Ц с использованием Control System Toolbox (проверить полученный результат)
>> W = tf([6],[0.04 0.44 1])
Transfer function:
---------------------
0.04 s^2 + 0.44 s + 1
>> [A B C D] = tf2ss([6],[0.04 0.44 1])
A =
-11 -25
1 0
B =
C =
0 150
D =
1.2. ќпределить нули и полюса системы Ц с использованием Control System Toolbox.
>> W_zp=zpk(W)
W_zp =
-------------------
(s+7.791) (s+3.209)
Continuous-time zero/pole/gain model.
>> z=zero(W)
z =
Empty matrix: 0-by-1
>> p=pole(W)
p =
-7.7913
-3.2087

ѕостроить в Simulink модель дл€ исследовани€ колебательного звена 2 пор€дка с заданными параметрами K, T и z.

Ќаписать скрипт на €зыке Matlab, который по данным переходного процесса будет определ€ть показатели качества (перерегулирование, врем€ переходного процесса, колебательность)

врем€ переходного процесса 1.5 c
перерегулирование = 1.52%
ќпределить передаточную функцию системы, полученной из заданной путем ее замыкани€ через единичную отрицательную обратную св€зь (ќќ—), перейти от записи системы в виде передаточной функции к записи в виде уравнений состо€ни€, определить нули и полюса системы.
Ј передаточную функцию системы ќќ—
>> W0=1
W0 =
>> R1=feedback(W,W0,-1)
R1 =
---------------------
0.04 s^2 + 0.44 s + 7
Ј в виде уравнений состо€ни€
>> [A B C D]=tf2ss([6],[0.04 0.44 7])
A =
-11 -175
1 0
B =
C =
0 150
D =
=  +
+
Ј определить нули и полюса системы
>> z=zero(R1)
z =
Empty matrix: 0-by-1
>> p=pole(R1)
p =
-5.5000 +12.0312i
-5.5000 -12.0312i
ѕостроить в Simulink модель дл€ исследовани€ полученной замкнутой системы с ќќ—.

1.7. ќпределить передаточную функцию системы, полученной из заданной путем ее замыкани€ через положительную обратную св€зь (ѕќ—) с коэффициентом Kос, построить в Simulink модель дл€ исследовани€ полученной замкнутой системы.
>> R2=feedback(W,W0,1)
R2 =
---------------------
0.04 s^2 + 0.44 s - 5
Continuous-time transfer function.

1.8. ќпределить значение Kос, привод€щее замкнутую систему с ѕќ— на границу устойчивости. Cистему с ѕќ— на границу устойчивости когда урарнение
2. ћоделирование временных характеристик звена
|
|
|
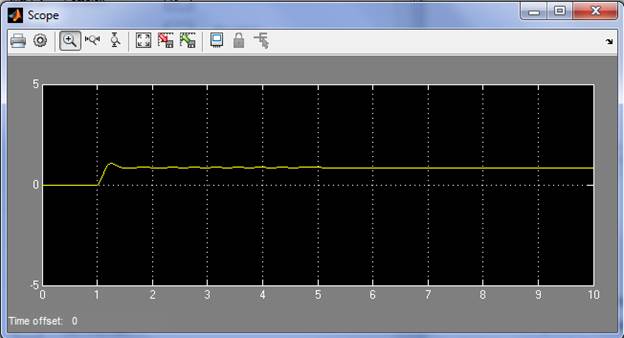
2.1. ѕостроить переходную функцию звена:
Ц с использованием Simulink (без использовани€ Control System Toolbox);

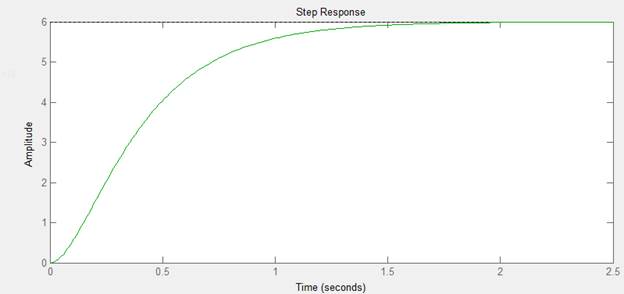
Ц с использованием Control System Toolbox (без использовани€ Simulink).

ѕо переходной характеристике определить показатели качества (перерегулирование, врем€ переходного процесса, колебательность).
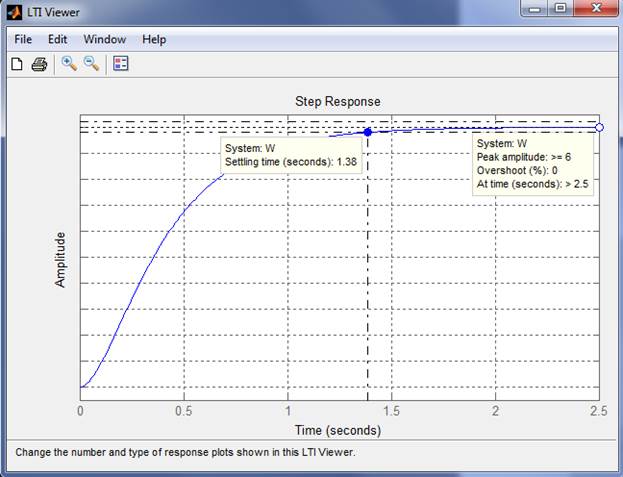
врем€ переходного процесса 1.38 c
перерегулирование = 0%
2.3. »сследовать вли€ние заданного параметра (K, T или z) на вид переходной функции, рассмотреть следующие значени€ параметра: 10% от исходного, 50% от исходного, 100% от исходного, 150% от исходного, 200% от исходного, 1000% от исходного. ƒл€ сравнени€ переходных функций результаты совместить на одном графике.
>> W=tf([6],[0.04 0.44 1]);
>> D1=tf([6],[0.04 0.044 1]);
>> ltiview(W,D1)

>> D2=tf([6],[0.04 0.22 1]);
>> ltiview(W,D2)

>> D3=tf([6],[0.04 0.44 1]);
>> ltiview(W,D3)
>> D4=tf([6],[0.04 0.66 1]);
>> ltiview(W,D4)

>> D5=tf([6],[0.04 0.88 1]);
>> ltiview(W,D5)

>> D6=tf([6],[0.04 4.4 1]);
>> ltiview(W,D6)


