




ѕромышленный робот - автоматическа€ машина, состо€ща€ из манипул€тора и устройства программного управлени€ его движением, предназначенна€ дл€ замены человека при выполнении основных и вспомогательных операций в производственных процессах.
ћанипул€тор - совокупность пространственного рычажного механизма и системы приводов, осуществл€юща€ под управлением программируемого автоматического устройства или человека-оператора действи€ (манипул€ции), аналогичные действи€м руки человека.
лассификаци€ промышленных роботов.
ѕромышленные роботы классифицируютс€ по следующим признакам:
| по характеру выполн€емых технологических операций 1.основные; 2.вспомогательные; 3.универсальные | по грузоподъемности 1.сверхлегкие (до 10 Ќ); 2.легкие (до 100 Ќ); 3.средние (до 2000 Ќ); 4.т€желые (до 10000 Ќ); 5.сверхт€желые (свыше 10000 Ќ); |
| по виду производства 1. литейные; 2.сварочные; 3.кузнечно-прессовые; 4.дл€ механической обработки; 5.сборочные; 6.окрасочные; 7.транспортно-складские; | по типу силового привода 1.электромеханический; 2.пневматический; 3.гидравлический; 4.комбинированный; |
| по системе координат руки манипул€тора 1.пр€моугольна€; 2.цилиндрическа€; 3.сферическа€; 4.сферическа€ углова€ (ангул€рна€); 5.другие; | по подвижности основани€ 1.мобильные; 2.стационарные; |
| по характеру программировани€ 1.позиционное; 2.контурное; 3.комбинированное. | по виду программы с жесткой программой; 1.перепрограммируемые; 2.адаптивные; 3.с элементами искусственного интеллекта |
| по числу подвижностей манипул€тора |
Ќазначение и область применени€.
ѕромышленные роботы предназначены дл€ замены человека при выполнении основных и вспомогательных технологических операций в процессе промышленного производства. ѕри этом решаетс€ важна€ социальна€ задача - освобождени€ человека от работ, св€занных с опасност€ми дл€ здоровь€ или с т€желым физическим трудом, а также от простых монотонных операций, не требующих высокой квалификации. √ибкие автоматизированные производства, создаваемые на базе промышленных роботов, позвол€ют решать задачи автоматизации на предпри€ти€х с широкой номенклатурой продукции при мелкосерийном и штучном производстве. опирующие манипул€торы, управл€емые человеком-оператором, необходимы при выполнении различных работ с радиоактивными материалами. роме того, эти устройства незаменимы при выполнении работ в космосе, под водой, в химически активных средах. “аким образом, промышленные роботы и копирующие манипул€торы €вл€ютс€ важными составными част€ми современного промышленного производства.
ѕринципиальное устройство промышленного робота.
ћанипул€тор промышленного робота по своему функциональному назначению должен обеспечивать движение выходного звена и, закрепленного в нем, объекта манипулировани€ в пространстве по заданной траектории и с заданной ориентацией. ƒл€ полного выполнени€ этого требовани€ основной рычажный механизм манипул€тора должен иметь не менее шести подвижностей, причем движение по каждой из них должно быть управл€емым. ѕромышленный робот с шестью подвижност€ми €вл€етс€ сложной автоматической системой. Ёта система сложна как в изготовлении, так и в эксплуатации. ѕоэтому в реальных конструкци€х промышленных роботов часто используютс€ механизмы с числом подвижностей менее шести. Ќаиболее простые манипул€торы имеют три, реже две, подвижности. “акие манипул€торы значительно дешевле в изготовлении и эксплуатации, но предъ€вл€ют специфические требовани€ к организации рабочей среды. Ёти требовани€ св€заны с заданной ориентацией объектов манипулировани€ относительно механизма робота. ѕоэтому оборудование должно располагатьс€ относительно такого робота с требуемой ориентацией.
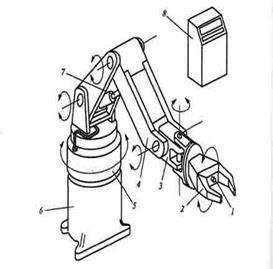
–ассмотрим дл€ примера структурную и функциональную схемы промышленного робота с трехподвижным манипул€тором. ќсновной механизм руки манипул€тора состоит из неподвижного звена 0 и трех подвижных звеньев 1, 2 и 3 (рис.19.1). ћеханизм этого манипул€тора соответствует цилиндрической системе координат. ¬ этой системе звено 1 может вращатьс€ относительно звена 0 (относительное угловое перемещение j10), звено 2 перемещаетс€ по вертикали относительно звена 1 (относительное линейное перемещение S21) и звено 3 перемещаетс€ в горизонтальной плоскости относительно звена 2 (относительное линейное перемещение S32). Ќа конце звена 3 укреплено захватное устройство или схват, предназначенный дл€ захвата и удержани€ объекта манипулировани€ при работе манипул€тора. «вень€ основного рычажного механизма манипул€тора образуют между собой три одноподвижные кинематические пары (одну вращательную ј и две поступательные ¬ и —) и могут обеспечить перемещение объекта в пространстве без управлени€ его ориентацией. ƒл€ выполнени€ каждого из трех относительных движений манипул€тор должен быть оснащен приводами, которые состо€т двигателей с редуктором и системы датчиков обратной св€зи.
|
|
|

|
| –ис. 19.1 |
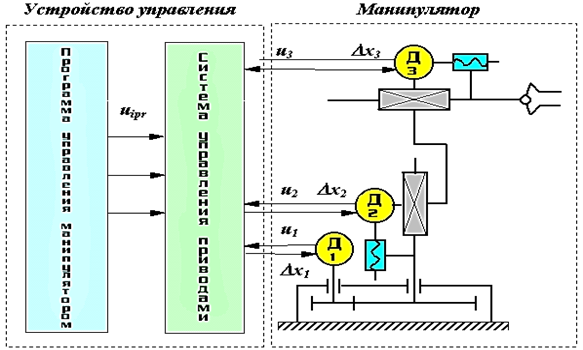
“ак как движение объекта осуществл€етс€ по заданному закону движени€, то в системе должны быть устройства, сохран€ющие и задающие программу движени€, которые назовем программоносител€ми.
| –ис. 19.2 |
ѕри управлении от Ё¬ћ такими устройствами могут быть дискеты, диски CD, магнитные ленты и др. ѕреобразование заданной программы движени€ в сигналы управлени€ двигател€ми осуществл€етс€ системой управлени€. Ёта система включает Ё¬ћ, с соответствующим программным обеспечением, цифроаналоговые преобразователи и усилители.

—истема управлени€, в соответствии с заданной программой, формирует и выдает на исполнительные устройства приводов (двигатели) управл€ющие воздействи€ ui. ѕри необходимости она корректирует эти воздействи€ по сигналам Dxi, которые поступают в нее с датчиков обратной св€зи. ‘ункциональна€ схема промышленного робота приведена на рис. 19.2.
| 
|
ќсновные пон€ти€ и определени€. —труктура манипул€торов.
√еометро-кинематические характеристики.
‘ормула строени€ - математическа€ запись структурной схемы манипул€тора, содержаща€ информацию о числе его подвижностей, виде кинематических пар и их ориентации относительно осей базовой системы координат (системы, св€занной с неподвижным звеном).
ƒвижени€, которые обеспечиваютс€ манипул€тором дел€тс€ на:
- глобальные (дл€ роботов с подвижным основанием) - движени€ стойки манипул€тора, которые существенно превышают размеры механизма;
- региональные (транспортные) - движени€, обеспечиваемые первыми трем€ звень€ми манипул€тора или его "рукой", величина которых сопоставима с размерами механизма;
- локальные (ориентирующие) - движени€, обеспечиваемые звень€ми манипул€тора, которые образуют его "кисть", величина которых значительно меньше размеров механизма.
¬ соответствии с этой классификацией движений, в манипул€торе можно выделить два участка кинематической цепи с различными функци€ми: механизм руки и механизм кисти. ѕод "рукой" понимают ту часть манипул€тора, котора€ обеспечивает перемещение центра схвата - точки ћ (региональные движени€ схвата); под "кистью" - те звень€ и пары, которые обеспечивают ориентацию схвата (локальные движени€ схвата).
|
|
|

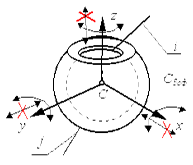
–ассмотрим структурную схему антропоморфного манипул€тора, то есть схему котора€ в первом приближении соответствует механизму руки человека (рис.19.3).

|
| –ис. 19.3 |
Ётот механизм состоит из трех подвижных звеньев и трех кинематических пар: двух трехподвижных сферических ј3сф и —3сф и одной одноподвижной вращательной ¬1в.
инематические пары манипул€тора характеризуютс€: именем или обозначением ѕ - заглавна€ буква латинского алфавита (A,B,C и т.д.); звень€ми, которые образуют пару (0/1,1/2 и т.п.); относительным движением звеньев в паре (дл€ одноподвижных пар - вращательное, поступательное и винтовое); подвижностью ѕ (дл€ низших пар от 1 до 3, дл€ высших пар от 4 до 5); осью ориентации оси ѕ относительно осей базовой или локальной системы координат.
–абочее пространство манипул€тора - часть пространства, ограниченна€ поверхност€ми огибающими к множеству возможных положений его звеньев.
«она обслуживани€ манипул€тора - часть пространства соответствующа€ множеству возможных положений центра схвата манипул€тора. «она обслуживани€ €вл€етс€ важной характеристикой манипул€тора. ќна определ€етс€ структурой и системой координат руки манипул€тора, а также конструктивными ограничени€ми наложенными относительные перемещени€ звеньев в ѕ.
ѕодвижность манипул€тора W - число независимых обобщенных координат однозначно определ€ющее положение схвата в пространстве.
|
или дл€ незамкнутых кинематических цепей:

|
ћаневренность манипул€тора ћ - подвижность манипул€тора при зафиксированном (неподвижном) схвате.

|
¬озможность изменени€ ориентации схвата при размещении его центра в заданной точке зоны обслуживани€ характеризуетс€ углом сервиса - телесным углом , который может описать последнее звено манипул€тора (звено на котором закреплен схват) при фиксации центра схвата в заданной точке зоны обслуживани€.

|
где: fC - площадь сферической поверхности, описываема€ точкой — звена 3, lCM - длина звена 3.
ќтносительна€ величина k = / (4), называетс€ коэффициентом сервиса. ƒл€ манипул€тора, изображенного на рис.19.4,
| подвижность манипул€тора: W = 6 * 3 - (3 * 2 - 5 * 1) = 18 - 11 = 7; маневренность: M = 7 - 6 = 1; формула строени€: W = [10 + 10 + 10 ] + 21 + [32 + 32 + 32 ]. |

|
| –ис. 19.4 |
—труктура кинематической цепи манипул€тора должна обеспечивать требуемое перемещение объекта в пространстве с заданной ориентацией. ƒл€ этого необходимо, чтобы схват манипул€тора имел возможность выпон€ть движени€ минимум по шести координатам: трем линейным и трем угловым. –ассмотрим на объекте манипулировани€ точку ћ, котора€ совпадает с центром схвата. ѕоложение объекта в неподвижной (базовой) системе координат 0x0y0z0 определ€етс€ радиусом-вектором точки ћ и ориентацией единичного вектора  с началом в этой точке. ¬ математике положение точки в пространстве задаетс€ в одной из трех систем координат:
с началом в этой точке. ¬ математике положение точки в пространстве задаетс€ в одной из трех систем координат:
пр€моугольной декартовой с координатами xM, yM, zM;
цилиндрической с координатами rsM, M, zM;
сферической с координатами rM, M, M.
ќриентаци€ объекта в пространстве задаетс€ углами , и , которые вектор ориентации образует с ос€ми базовой системы координат. Ќа рис. 19.5 дана схема шести подвижного манипул€тора с вращательными кинематическими парами с координатами объекта манипулировани€.
|
|
|
¬ общем случае св€зь между координатами  ,
,  ,
,  точки грейферного захвата манипул€тора и управл€емыми обобщенными координатами
точки грейферного захвата манипул€тора и управл€емыми обобщенными координатами  определ€етс€ системой уравнени€
определ€етс€ системой уравнени€

| 
| 
| (1) |
”равнени€ св€зи между координатами рабочей точки и обобщенными координатами исполнительных устройств дл€ прин€той кинематической схемы манипул€тора примут вид
 , (2)
, (2)
 , (3)
, (3)
 ,
,  , (4)
, (4)
 (5)
(5)
 , (6)
, (6)
 , (7)
, (7)
ќдним из основных моментов, заслуживающих особое внимание при рассмотрении процесса движени€ грейферного захвата и составных элементов гидравлического манипул€тора в услови€х производственного пространства лесопромышленного склада, есть вли€ние ограничений на формирование зоны обслуживани€.
¬ следствии проведенного анализа и синтеза ограничений определены их основные группы:
Ц ограничени€, которые созданы преп€тстви€ми в виде производственных объектов и штабелей древесины;
Ц ограничени€, св€занные с соотношением длины стрелы и руко€ти манипул€тора, а так же с типом структурной схемы манипул€тора;
Ц ограничени€, которые накладываютс€ подвижностью в кинематических парах манипул€тора.
ѕоследние два ограничени€ могут быть решены еще на стадии проектировани€ механизма гидравлического манипул€тора, так как на передпроектном этапе известны технологические задачи, которые должен выполн€ть манипул€тор.
ѕервое ограничение €вл€етс€ более существенным, так как не подлежит решению на этапе выбора структурной схемы и технических характеристик манипул€тора. — целью решени€ этого вопроса возникает необходимость произвести формализацию существующих преп€тствий различными элементарными геометрическими образами. ним относ€тс€: штабел€ круглых лесоматериалов, торцевыравниматель, лесонакопители, сортировочный транспортер Ц параллелепипеды произвольных размеров и ориентации; сложные объекты и технологическое оборудование неправильных форм, (например эстакада с хлыстами), которые представл€ютс€ в виде многоугольников с выпуклыми сторонами.
Ќеобходимо отметить, что формализаци€ ограничений не решает вопрос свободного перемещени€ грейферного захвата между двум€ точками, которые расположены на значительном рассто€нии друг от друга по кратчайшей траектории движени€. ¬ сложных услови€х лесопромышленного склада, с большим количеством текущих задач по выполнению транспортно-переместительных операций, предлагаетс€ решение вопроса путем подъема первого звена манипул€тора с последующей его установкой на портал с возможностью выполнени€ передвижени€ параллельно расположенному сортировочному транспортеру [4].
¬ыводы. ќбзор технологических решений, предусматривающих применение манипул€торов на лесопромышленных складах, вы€вил их широкое разнообразие. ѕрактика применени€ манипул€торов на лесопромышленных складах показывает, что эффективность их работы зависит от зоны обслуживани€.
ƒл€ обеспечени€ эффективной работы манипул€торов: предложено использовать манипул€торы с вращающимис€ парами; установлено св€зь между координатами подвески грейфера и обобщенными координатами манипул€тора; изучены и формализованы существующие ограничени€ в зоне де€тельности манипул€тора.
ѕрактическое использование поставленной задачи возможно выполнить на основании разработанной конструкции машины дл€ выполнени€ переместительных операций на лесопромышленном складе оборудованы гидравлическим манипул€тором.

|
| –ис. 19.5 |
ѕри структурном синтезе механизма манипул€тора необходимо учитывать следующее:
|
|
|
- кинематические пары манипул€торов снабжаютс€ приводами, включающими двигатели и тормозные устройства, поэтому в схемах манипул€торов обычно используютс€ одноподвижные кинематические пары: вращательные или поступательные;
- необходимо обеспечить не только заданную подвижность свата манипул€тора, но и такую ориентацию осей кинематических пар, котора€ обеспечивала необходимую форму зоны обслуживани€, а также простоту и удобство программировани€ его движений;
- при выборе ориентации кинематических пар необходимо учитывать расположение приводов (на основании или на подвижных звень€х), а также способ уравновешивани€ сил веса звеньев.
ѕри выполнении первого услови€ кинематические пары с несколькими подвижност€ми замен€ют эквивалентными кинематическими соединени€ми. ѕример такого соединени€ дл€ сферической пары дан на рис. 19.6.
ѕеремещение схвата в пространстве можно обеспечить, если ориентировать оси первых трех кинематических пар по ос€м одной из осей координат. ѕри этом выбор системы координат определ€ет тип руки манипул€тора и вид его зоны обслуживани€. ѕо √ќ—“ 25685-83 определены виды систем координат дл€ руки манипул€тора, которые приведены в таблице 19.1. «десь даны примеры структурных схем механизмов соответствующие системам координат. —труктурные схемы механизмов кисти, примен€емые в манипул€торах, даны в таблице 19.2. ѕрисоедин€€ к выходному звену руки тот или иной механизм кисти, можно получить большинство известных структурных схем манипул€торов, которые примен€ютс€ в реальных промышленных роботах.
| 
|
| —ферическа€ кинематическа€ пара | Ёквивалентное кинематическое соединение |
–ис. 19.6
| —истемы координат "руки" манипул€тора. | “аблица 19.1 | |||
| ѕр€моугольна€ (декартова) | ÷илиндрическа€ | |||

| 
| |||
| —ферическа€ | ”глова€ (ангул€рна€) | |||

| 
| |||
| ƒругие | ||||
—труктура манипул€тора определ€етс€ и местом размещени€ приводов. ≈сли приводы размещаютс€ непосредственно в кинематических парах, то к массам подвижных звеньев манипул€тора добавл€ютс€ массы приводов. —уммарна€ нагрузка на приводы и их мощность увеличиваютс€, а отношение массы манипул€тора к полезной нагрузке (максимальной массе объекта манипулировани€) уменьшаетс€. ѕоэтому при проектировании роботов приводы звеньев руки, как наиболее мощные и обладающие большей массой, стрем€тс€ разместить ближе к основанию робота
“аблица 19.2

|
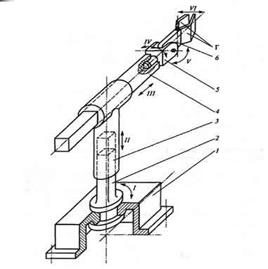
. ƒл€ передачи движени€ от привода к звену используютс€ дополнительные кинематические цепи. –ассмотрим схему руки манипул€тора ѕ– фирмы ASEA (рис.19.7). трехзвенному механизму с ангул€рной системой координат добавлены:
- дл€ привода звена 2 - простейший кулисный механизм, образованный звень€ми 4,5 и 2;
- дл€ привода звена 3 - цепь, состо€ща€ из кулисного механизма (звень€ 6,7 и 8) и шарнирного четырехзвенника (звень€ 8,9,2 и 3).
“аким образом, в рычажном механизме можно выделить кинематическую цепь руки (звень€ 1,2 и 3) и кинематические цепи приводов. ћанипул€торы использующие принцип размещени€ приводов на основании имеют более сложные механизмы. ќднако увеличение числа звеньев и кинематических пар компенсируетс€ уменьшением масс и моментов инерции, подвижных звеньев манипул€тора. роме того, замкнутые кинематические цепи повышают точность и жесткость механизма. ¬ целом манипул€торы, использующие принципы комбинированного размещени€ приводов (часть приводов на основании, часть на подвижных звень€х), обладают лучшими энергетическими и динамическими характеристиками, а также более высокой точностью.
¬ кинематических схемах рассмотренных манипул€торов веса звеньев вызывают дополнительную нагрузку на приводы. ‘ирма SKILAM разработала робот SANCIO (рис. 19.8) в котором веса приводов и звеньев воспринимаютс€ кинематическими парами, а на момент двигателей вли€ют только через силы трени€. “ака€ структурна€ схема механизма потребовала увеличени€ размеров кинематических пар, однако в целом был получен существенный выигрыш по энергетическим и динамическим показател€м.
ƒанные примеры не охватывают всех возможных ситуаций рационального выбора структуры манипул€торов. ќни только демонстрируют наиболее известные из удачных структурных схем.

| ||
| –ис. 19.7 | –ис. 19.8 | |
¬ажна€ особенность манипул€торов - изменение структуры механизма в процессе работы, о чем говорилось на лекции по структуре механизмов. ¬ соответствии с циклограммой или программой работы робота, в некоторых кинематических парах включаютс€ тормозные устройства. ѕри этом два звена механизма жестко соедин€ютс€ с друг другом, образу€ одно звено. »з структурной схемы механизма исключаетс€ одна кинематическа€ пара и одно звено, число подвижностей схвата механизма уменьшаетс€ (обычно на единицу). »змен€етс€ структура механизма и в тех случа€х, когда в процессе выполнени€ рабочих операций (на пример, при сборке или сварке) схват с объектом манипулировани€ соприкасаетс€ с окружающими предметами, образу€ с ними кинематические пары. инематическа€ цепь механизма замыкаетс€, а число подвижностей уменьшаетс€. ¬ этом случае в цепи могут возникать избыточные св€зи. Ёти структурные особенности манипул€торов необходимо учитывать при программировании работы промышленного робота.
Ѕыстродействие ѕ– определ€ют максимальной скоростью линейных перемещений центра схвата манипул€тора. –азличают ѕ– с малым (VM <0.5 м/с), средним (0.5 < VM < 1.0 м/с) и высоким (VM >1.0м/с) быстродействием. —овременные ѕ– имеют в основном среднее быстродействие и только около 20% - высокое.
“очность манипул€тора ѕ– характеризуетс€ абсолютной линейной погрешностью позиционировани€ центра схвата. ѕромышленные роботы дел€тс€ на группы с малой (D rM < 1мм), средней (0.1 мм < D rM < 1 мм) и высокой (DrM < 0.1 мм) точностью позиционировани€.
|
|
|
онтрольные вопросы к лекции 19
1. „то такое манипул€тор, автооператор и промышленный робот?(стр.1-2)
2. ¬ чем особенности систем управлени€ промышленных роботов?(стр.2-4)
3. „то такое подвижность манипул€тора? ак она определ€етс€?(стр.5-6)
4. ƒайте определени€ рабочего пространства, зоны обслуживани€ манипул€тора и его маневренности (на примере антропоморфного манипул€тора) (стр.4-6)
5. „то такое угол сервиса? „то такое коэффициент сервиса? (стр.5-6)
6. ѕриведите структурные схемы механизмов схвата манипул€торов.(стр.7-9)
Ќазначение и области применени€. лассификаци€ промышленных роботов. ѕринципиальное устройство промышленного робота. ќсновные пон€ти€ и определени€.—труктура манипул€торов. √еометро-кинематические характеристики
Ћитература
1. јл€бьев ¬.»., –ахманин √.ј., —альникова «.—. »сследование зоны действи€ погрузочно-штабелевочных манипул€торов// “руды ÷Ќ»»ћЁ. Ц’имки: ÷Ќ»»ћЁ. Ц1970. Ц¬ып. 108. Ц —.66Ц78.
2. оренд€сев, ј. ». и др. ћанипул€ционные системы роботов/ ј.». оренд€сев, Ѕ. Ћ. —аламандра, Ћ. ». “ывес; ѕод ред. ј. ». оренд€сева. Цћ.: ћашиностроение,1989.Ц 471 с.
3. Ѕакай Ѕ.я. ќбірунтуванн€ технологiчних вимог до сортувально-штабелювального механiзму на базi манiпул€тора, обладнаного грейферним захоплювачем// Ќауковий вiсник. ЦЋьвiв: ”крƒЋ“”. Ц2003. Ц¬ипуск 13.2. Ц —. 90Ц93.
4. Ѕакай Ѕ.я. “ехнологи€ и оборудование дл€ нижних складов с малым грузооборотом// Ћесной коплекс: состо€ние и перспективы развити€. Ц Ѕр€нск: Ѕ√»“ј. Ц 2003, вып. 6. Ц —. 3Ц7.
Ћитература
1. ‘у ., √онсалес –., Ћи . –обототехника.- ћ.: ћир, 1989.
2. Kane T., Dynamics, New York, Holt, Rihehart and Wiston, 1968.
3. ¬иттенбург …. ƒинамика систем твердых тел.- ћ.: ћир,1980.
4. Denavit J, Hartenberg R.S. A kinematic notation for lower≠-pair mechanisms based on matrices., J. Appl. Mech., 77, 1955, c.215-221.
5. ¬укобратович ћ., —токич ƒ., ирчански Ќ. Ќеадаптивное и адаптивное управление манипул€ционными роботами. - ћ.: ћир, 1989.
6. ѕопов ≈.ѕ. ”правление роботами-манипул€торами. »зв.јЌ ———–, “ехн. киберн., 1974, N 6, с.51-56.
7. Vukobratovic M., Stepanenko Y. Mathematical model of gene≠ral anthropomorphic systems. Math Biosciences, Vol.17, 1973, c.191-242.
8. Ќакано Ё. ¬ведение в робототехнику, ћ.: ћир, 1988.
9. Hollerbach J. A recursive Lagrangian formulation of manipu≠lator dynamics and comparative study of dynamic complication complexity. IEEE Trans. on SMC, SMC-10, No 11, 1980, c.730-736.
10. Kahn M.E., Roth B. The near-minimum-time control of open -loop articulated kinematic chains, ASME J. of Dynam Syst, Measur.and Countr., vol. 93, 1971, c.164-172.
11. Uicer J.J. Dynamic force analysis of spatial linkages, ASME J. of appl. mech., June, 1967, c.418-424.
12. Lee C.S.G., Lee B.H., Nigam R. Development of generalized d'Alambert Equation of motion for mechanical manipulators, Proc 2nd conf. Decision and Control, San Antonio, 1983, c. 1205-1210
13. Thomas M, Tesar D. Dynamic modeling of serial manipulator arms. Trans. of ASME, vol. 104, Sept, 1982,c.218-228.
14. Mahil S. On the application of Lagrange's method to the description of dynamic systems. IEEE Trans. on SMC, vol SMC-12, N 6, 1982.
15. Wang L.T., Ravani B. Recursive computations of kinematic and dynamic equations for mechanical manipulators. IEEE J. of Rob. and Autom., vol. RA-1, N 3, Sept. 1985, c.124-131.
16. Balafoutis C, Patel R., Misra P. Efficient modeling and computation of manipulator dynamics using orthogonal cartesian tensors. IEEE J. of Rob. and Autom., 4, N 6, c.665-676.
17. Castelain J.M, Bernier D. A new program based on the hiper≠complex theory for automatic generation of the direct differen≠tial model of robot manipulators. Mech. mach. theory, vol. 25, N 1, 1990, c.69-83.
18. Mladenova C. Mathematical modeling and control of manipu≠lator systems. Int. J. Robotics and computer-integrated manufac≠turing, vol. 8, N 4, 1991, c 233-242.
19. F.C. Park, J. Choi, and S.R. Ploen, ФA Li Group Formulation of Robot Dynamics,ФThe Int. J. of Robotics Research, Vol.14, No.6, Dec.1995.
20. Paul R. Manipulator cartesian path control. IEEE Trans. on SMC-9, Febr, 1979, c.702-711.
21. Vukobratovic M, Potkonjak V. Contribution to automatic forming of active chain models via Lagrangian form. J of Appl. Mech., N 1, 1979.
22. Renaud N. An efficient iterative analytical procedure for obtaining a robot manipulator dynamic model. Proc. of FirstInt. Symp. of Rob. Research, Bretton Woods, New Hampshire, USA,1983.
23. Li C.G. A new method for dynamic analysis of robot manipu≠lators. IEEE Trans. on Syst., Man and Cybern., 1988, 18, N 1, c.105-114.
24. Walker M.W., Orin D.E. Efficient dynamic computer simula≠tion of robotic mechanisms. ASME J. of Dyn. Syst.,Meas. and Contr., vol. 104, Sept. 1982, c.205-211.
25. Armstrong W.W. Recursive solution to the equations of motion of an n-link manipulator. Proc of the 5th World Congress on Theory of Mach. and Mech, Montreal, 1979, c. 1343-1346.
26. ћалышев ј.Ѕ., „уменко ¬.Ќ. ”ниверсальные программы модели≠ровани€ динамики манипул€ционного робота. "–оботы и –“—", »ркутск, 1983, 117-126.
27. ѕопов ≈.ѕ., ¬ерещагин ј.‘., «енкевич —.Ћ. ћанипул€ционные роботы: динамика и алгоритмы.- ћ.: Ќаука, 1980.
28. Huston R.L. The use of Kane's metod in the modeling and simulation of robotic systems. Proc. IMACS Symp. Syst. Modeling and Simul., Cetraro, 18-21 sept, 1988.
29. Ma X., Xu X. A futher study of Kane's equations. Proc IEEE Int Conf Syst, Man and Cybern, Beijing, Aug. 8-12, 1988, c.107-112.
30. оноплев ¬.ј. јгрегативные модели механики систем твердых тел со структурой дерева. »зв. јЌ ———–, ћ““, N 6, 1989, с 46-54.
31. ѕогорелов ƒ.ё., "јлгоритмы синтеза и численного интегрировани€ уравнений движени€ систем тел с большим числом степеней свободы", VIII¬сероссийский съезд по теоретической и прикладной механике, ѕермь, 2001, с. 490.
32. ».ё.Ѕалабан, √. .Ѕоровин, ¬.¬.—азонов, Уязык программировани€ правых частей уравнений движени€ сложных механических системФ, ѕрепринт »ѕћ им. ћ.¬. елдыша –јЌ, N 62, 1998, 22 с.
33. Dapper, R. Maafl, V. Zahn, R. Eckmiller, Neural Force Control (NFC) Applied to Industrial Manipulators in Interaction with Moving Rigid Objects, Proceedings of the 1998 IEEE International Conference on Robotics & Automation, Leuven, Belgium, May 1998.
34. S. Jung, S. B. Yim, T. C. Hsia, Experimental Studies of Neural Network Impedance Force Control for Robot Manipulators, Proceedings of the 2001 IEEE International Conference on Robotics & Automation, Seoul, Korea, May 2001.
35. G. Rodriguez, A. Jain and K. Kreutz-Delgado, "A Spatial Operator Algebra for Manipulator Modelling and Control," Int. J. Robotics Research, vol. 10, no. 4, pp. 371-381, 1991.
36. A. Jain, G. Rodriguez, Computational Robot Dynamics Using Spatial Operators, Proceedings of the 2000 IEEE International Conference on Robotics & Automation, San Francisco, CA, April 2000.
37. M. Emami, A. Goldenberg, I. Turksen, Fuzzy-Logic Dynamics Modeling of Robot Manipulators, Proceedings of the 1998 IEEE International Conference on Robotics & Automation, Leuven, Belgium, May 1998.
38. R. Featherstone, D. Orin, Robot Dynamics: Equations and Algorithms, Proceedings of the 2000 IEEE International Conference on Robotics & Automation, San Francisco, CA, April 2000.
39. Cheng P., Weng C., Chen C. Symbolic derivation of dynamic equation of motion for robot manipulator using program symbolic method. IEEE J. Rob. and Autom, 4, N 6, 1988, c. 599-609.
40. Ju M.S., Mansor J.M. Comparision of methods for developing the dynamics of rigid body systems. Int. J. Rob. Res., N6, 1989, c.19-27.
41. Ѕелоусов ».–., Уѕрименение метода символьных преобразований дл€ формировани€ алгоритмов параллельных вычислений в задачах кинематики и динамики роботовФ, ќтчет »ѕћ им. ћ.¬. елдыша –јЌ є 5-19-93, 1993, 25 с.
42. Lathrop L.H. Parallelism in manipulator dynamics. Int. J. Rob. Res., vol.4, No 2, 1985, c.80-102.
43. R. Featherstone, "A Divide-and-Conquer Articulated-Body Algorithm for Parallel O(log(n)) Calculation of Rigid-Body Dynamics. Part 1: Basic Algorithm," Int. Y. Robotics Research, vol. 18, no. 9, pp. 867-875, 1999.
44. A. Fijany, I. Sharf and G. M. T. D'Eleuterio, "Parallel O(logN) Algorithms for Computation of Manipulator Forward Dynamics," IEEE Trans. Robotics & Automation, vol. 11, no. 3, pp. 389-400, June 1995.
45. Vukobratovic M, Kircanski N, Real-time dynamics of manipu≠lation robots, Springer-Verlag, 1985.
46. Han J.-Y. Fault-tolerant computing for robot kinematics using linear arithmetic code. IEEE Int. Conf. Robotics and Auto≠mation, Cincinnati, May May 13-18, 1990, vol. 1, c.285-290.

