




ѕункт –≥ка, 3 кл.
≈лементи центруванн€ ≈лементи редукц≥њ
l = l 1=
θ = на п. θ1 = на п.
θ= на п. θ1 = на п.
онтрольний кут: на схем≥ _________º _______________′
≥з спостережень _________º _______________′
¬иконав
ѕерев≥рив
–исунок 2.30 - ¬игл€д центрувального листа п≥сл€ виконанн€
спостережень на перш≥й станц≥њ
÷ентрувальний лист є5
ѕункт –≥ка, 3 кл.
≈лементи центруванн€ ≈лементи редукц≥њ
l = l 1= на п.
θ = на п. θ1 = на п.
θ = на п. θ1 = на п.
онтрольний кут: на схем≥ _________º _______________′
≥з спостережень _________º _______________′

¬иконав
ѕерев≥рив
–исунок 2.31 - ¬игл€д центрувального листа п≥сл€ виконанн€
спостережень на друг≥й станц≥њ.
÷ентрувальний лист є5
ѕункт –≥ка, 3 кл.
≈лементи центруванн€ ≈лементи редукц≥њ
l =0.14 м l 1=0.26.
θ =83º на п. тр. √ай θ 1=93º на п. тр. √ай
θ =186º на п. тр. “урка θ 1=195º на п. тр. “урка
θ =54º на п. ќ–ѕ є1 θ 1=65º на п. на ќ–ѕ є1
θ =139º на п. ќ–ѕ є2 θ 1=151º на п. ќ–ѕ є2
онтрольний кут √ай-–≥ка-“урка: на схем≥ 102º 30′
≥з спостережень 102º 44′

¬иконав ѕетрÁ ѕетренко ≤.
ѕерев≥рив ¬ас¬ ¬асил≥в ¬
–исунок 2.32 - ¬игл€д центрувального листа п≥сл€ виконанн€
спостережень на трет≥й станц≥њ ≥ п≥сл€ його оформленн€
2.4.5.5 Ќестандартн≥ випадки при визначенн≥ елемент≥в приведенн€
ѕри визначенн≥ елемент≥в приведенн€ можуть виникати нестандартн≥ ситуац≥њ.
—итуац≥€ 1. ѕроекц≥њ ос≥ приладу, ос≥ симетр≥њ в≥зирного цил≥ндра ≥ центру пункту не попадають на один центрувальний столик. ¬ цьому випадку необх≥дно застосувати 2 або 3 центрувальних столики, на €к≥ необх≥дно спроектувати точки ≤, —, V.
≈лементи l ≥ l 1 в цьому випадку можна вим≥р€ти рулеткою, а кути θ ≥ θ 1, €к звичайно, транспортиром, попередньо прокресливши з точок ≤ та V напр€мки ≤— та VC та напр€мки на два пункти мереж≥ ≥ ор≥Їнтирн≥ пункти.
—итуац≥€ 2. ¬ звТ€зку з умовами спостережень високоточний теодол≥т в≥дставлений в≥д центра пункту на в≥ддаль 2Ц3 м.
” цьому випадку л≥н≥йний елемент l вим≥рюють рулеткою безпосередньо м≥ж центром пункту ≥ в≥ссю теодол≥та, а кутовий елемент θ Ч теодол≥том, €кий стоњть в точц≥ ≤ 1. ƒл€ цього с≥тку ниток або в≥зир на труб≥ навод€ть на с≥рник встановлений в центр пункту (при цьому на горизонтальному круз≥ встановлюють 0º0′), а пот≥м на два пункти мереж≥ та ор≥Їнтирн≥ пункти. ¬≥дл≥ки, зн€т≥ по горизонтальному круз≥, будуть кутовими елементами центруванн€ на в≥дпов≥дн≥ пункти.
2.4.6 ѕомилки кутових вим≥р≥в у тр≥ангул€ц≥њ
ƒл€ дос€гненн€ високоњ точност≥ кутових вим≥рювань при створенн≥ тр≥ангул€ц≥йних мереж необх≥дно враховувати вплив р≥зноман≥тних джерел помилок.
Ќа точн≥сть кутових вим≥рювань в тр≥ангул€ц≥њ основний вплив зд≥йснюють так≥ групи помилок: особист≥ помилки спостер≥гача, помилки прилад≥в та помилки зовн≥шнього середовища.
|
|
|
2.4.6.1 ќсобист≥ помилки
ќсобист≥ помилки спостер≥гача виникають, головним чином, в звТ€зку з неточним оц≥нюванн€м положенн€ ос≥ симетр≥њ в≥зирноњ ц≥л≥ при наведенн≥ на нењ б≥сектора, неточним сум≥щенн€м протилежних штрих≥в л≥мба, неточним оц≥нюванн€м дол≥ под≥лки барабанчика оптичного м≥крометра при вз€тт≥ в≥дл≥ку тощо.
÷≥ помилки можуть дос€гати 1Ц2″. ƒл€ њх послабленн€ намагаютьс€ забезпечити однакову €скрав≥сть в≥зирних ц≥лей, достатню електричну осв≥тлен≥сть круг≥в л≥мба та в≥дл≥ковоњ системи. ќсобист≥ помилки значно послаблюютьс€ при набутт≥ досв≥ду роботи спостер≥гачем.
2.4.6.2 ѕомилки прилад≥в
ƒо групи помилок прилад≥в в≥днос€ть так≥ помилки:
- не перпендикул€рност≥ в≥зирноњ ос≥ та ос≥ обертанн€ труби;
- нахилу горизонтальноњ ос≥ обертанн€ труби;
- нахилу вертикальноњ ос≥ обертанн€ приладу;
- нахилу площини л≥мба;
- ексцентриситету ал≥дади;
- ексцентриситету л≥мба.
ѕрирода вказаних помилок, характер њх впливу ≥ заходи, спр€мован≥ на њх ослабленн€, вивчаютьс€ в курс≥ У√еодезичн≥ приладиФ.
2.4.6.3 ѕомилки впливу зовн≥шнього середовища
Ќайб≥льш небезпечними Ї помилки впливу зовн≥шнього середовища. ƒо них в≥днос€тьс€ помилки:
- за вплив горизонтальноњ рефракц≥њ;
- за вплив близькост≥ предмет≥в;
- за вплив фаз в≥зирних ц≥лей;
- за вплив закручуванн€ та вигинанн€ сигнал≥в;
- за вплив видимост≥ ≥ коливанн€ зображень.
¬плив горизонтальноњ рефракц≥њ
¬насл≥док нер≥вном≥рного розпод≥лу в простор≥ температури, тиску ≥ вологост≥ пов≥тр€ приземн≥ шари атмосфери в р≥зних м≥сц€х мають неоднакову густину. ¬≥зирний пром≥нь, проход€чи на своЇму шл€ху шари атмосфери з р≥зною густиною, заломлюЇтьс€. ÷е €вище називаЇтьс€ рефракц≥Їю. –озр≥зн€ють горизонтальну ≥ вертикальну складов≥ рефракц≥њ, €к≥ €вл€ють собою викривленн€ в≥зирного промен€ в≥дпов≥дно в горизонтальних ≥ вертикальних площинах.
√оризонтальна складова рефракц≥њ Ч викривленн€ горизонтальних напр€мк≥в, вертикальна складова Ч викривленн€ вертикальних кут≥в або зен≥тних в≥дстаней.
” даному випадку нас ц≥кавить вплив горизонтальноњ складовоњ рефракц≥њ або горизонтальноњ рефракц≥њ.
ƒосл≥дженн€ вчених-геодезист≥в показали, що помилки в напр€мках, викликан≥ впливом горизонтальноњ рефракц≥њ, €ка виникаЇ в звТ€зку з р≥зноман≥тн≥стю ф≥зико-географ≥чних умов м≥сцевост≥ (рельЇфу, рослинного покриву тощо), можуть дос€гати 3Ц7″. ¬рахувати цей вплив практично неможливо, в звТ€зку з в≥дсутн≥стю повноњ ≥нформац≥њ про зм≥ну метеофактор≥в на шл€ху проходженн€ в≥зирних промен≥в. “ому намагаютьс€ максимально послабити вплив горизонтальноњ рефракц≥њ, виконуючи кутов≥ вим≥ри в пер≥оди, у €к≥ њњ вплив м≥н≥мальний. “акими Ї пер≥оди, коли вертикальн≥ температурн≥ град≥Їнти дор≥внюють нулю або близьк≥ до нього.
¬они наступають вранц≥ при зм≥н≥ додатних град≥Їнт≥в температури на в≥дТЇмн≥ (починаютьс€ 0,5 год. п≥сл€ сходу —онц€ ≥ тривають приблизно 2 години в сон€чн≥ дн≥ ≥ 3 години в хмарн≥) ≥ ввечер≥ при зм≥н≥ в≥д`Їмних град≥Їнт≥в температури на додатн≥ (починаютьс€ з 16 год. в хмарн≥ ≥ 17 год. в сон€чн≥ дн≥ ≥ зак≥нчуютьс€ 0,5 год. перед заходом сонц€).
ƒл€ ослабленн€ впливу горизонтальноњ рефракц≥њ кутов≥ вим≥рюванн€ необх≥дно виконувати не менше €к у дв≥ видимост≥, причому приблизно половину вим≥р≥в виконують у веч≥рню, а другу половину Ч у ранкову видим≥сть.
|
|
|
“ут п≥д терм≥ном Увидим≥стьФ розум≥Їмо пер≥од з ч≥ткими або злегка хиткими зображенн€ми предмет≥в.
¬плив близькост≥ предмет≥в
якщо в≥зирний пром≥нь проходить близько в≥д поверхн≥ земл≥, споруди (будинку, башти, труби, опори Ћ≈ѕ, геодезичного знаку), рослинного масиву тощо, в≥н заломлюЇтьс€, в звТ€зку з≥ зм≥ною температури пов≥тр€ б≥л€ цих перешкод, а отже, зм≥ною густини пов≥тр€ в цих м≥сц€х. ѕрирода викривленн€ промен€ под≥бна впливу горизонтальноњ рефракц≥њ.
ƒл€ запоб≥ганн€ цього впливу проектуванн€ та орган≥зац≥ю спостережень сл≥д зд≥йснювати так, щоб в≥зирний пром≥нь проходив на висот≥ не менш≥й к≥лькох метр≥в над предметами. Ќеобх≥дно уникати випадк≥в, коли в≥зирний пром≥нь проходить вздовж ст≥н та ≥нших л≥н≥йних споруд чи рослинних масив≥в ближче н≥ж 2 м, в≥д стовп≥в чи перил геодезичного знаку ближче н≥ж 0,2 м.
¬плив фаз в≥зирних ц≥лей

–исунок 2.33 - ¬плив фаз в≥зирноњ ц≥л≥
ѕри кутових спостереженн€х в тр≥ангул€ц≥њ в≥зуванн€ б≥сектором ниток виконують на в≥сь –– 1 в≥зирного цил≥ндра, висота €кого
0,5 м, ширина 0,2Ц0,3 м. “а частина поверхн≥ в≥зирного цил≥ндра, €ка повернута до —онц€, осв≥тлена б≥льше н≥ж ≥нш≥ частини, тому спостер≥гач не зовс≥м в≥рно встановлюЇ в≥сь в≥зирного цил≥ндра, тому наводить б≥сектор на л≥н≥ю QQ 1, б≥льш осв≥тлену ≥ €ка в≥дхил€Їтьс€ вб≥к в≥д –– 1 (рис. 2.33). ¬еличина в≥дхиленн€ ос≥ QQ 1 в≥д ос≥ цил≥ндра –– 1 зм≥нюЇтьс€, в звТ€зку з обертанн€м «емл≥ навколо своЇњ ос≥ прот€гом доби ≥ в звТ€зку з цим зм≥ною м≥сцеположенн€ —онц€ по в≥дношенню до геодезичного сигналу, на €кий ведуть спостереженн€.
ѕром≥жки часу, за €к≥ в≥дбуваЇтьс€ зм≥щенн€ осв≥тленоњ частини в≥зирного цил≥ндра, називаютьс€ фазами спостережень, а помилки викликан≥ спостереженн€ми в р≥зн≥ фази називають помилками за вплив фаз в≥зирних ц≥лей. ¬они були ви€влен≥ √ауссом .‘.
ƒл€ ослабленн€ помилок за вплив фаз, в≥зирн≥ ц≥л≥ виготовл€ють з рад≥ально розм≥щених планок (метал≥чних чи дерев`€них), що спри€Ї розс≥юванню сон€чних промен≥в у р≥зних напр€мках, а отже р≥вном≥рному осв≥тленню ус≥х частин в≥зирного цил≥ндра.
¬плив закручуванн€ та вигинанн€ сигнал≥в
ѕри нагр≥ванн≥ геодезичного сигналу сон€чними промен€ми ≥ при зм≥н≥ вологост≥ пов≥тр€ в сигнал≥ виникають деформац≥њ, в результат≥ €ких вершина сигналу на прот€з≥ доби закручуЇтьс€ навколо вертикальноњ ос≥. јмпл≥туда закручуванн€ вершини сигналу за 5 хвилин може дос€гти 5², за годину Ч 25², за добу Ч 15′.
р≥м того, сигнал вигинаЇтьс€ (под≥бно до сон€шника) в напр€мку до —онц€, описуючи на прот€з≥ доби певну криву, б≥льш менш сталу дл€ даного сигналу.
¬им≥рюванн€ кут≥в теодол≥том з≥ столика, що знаходитьс€ у верхн≥й частин≥ сигналу, буде виконуватис€ з помилками, оск≥льки теодол≥т буде зм≥нювати своЇ м≥сцеположенн€ в≥дносно центру пункту.
ќслабленн€ впливу закручуванн€ та вигинанн€ сигналу можна зд≥йснити: застосуванн€м пов≥рочноњ труби, скороченн€м часу спостережень в одному заход≥, виконанн€м обох п≥взаход≥в за одинаковий пер≥од часу при обовТ€зковому обертанн≥ ал≥дади в п≥взаходах в протилежних напр€мках. як правило, помилка закручуванн€ ≥ вигинанн€ сигнал≥в на вим≥р€н≥ напр€мки не перевищуЇ 0,2².
¬плив видимост≥ та коливанн€ зображень на точн≥сть кутових спостережень
¬идим≥сть Ч це стан атмосфери, €кий характеризуЇ €к≥сть зображенн€ в≥зирноњ ц≥л≥ в труб≥.
¬идим≥сть вважаЇтьс€ задов≥льною, €кщо предмети (наприклад, гори) видно на в≥ддал≥ в≥д 15 до 20 км, доброю Ч на в≥ддал≥ в≥д 20 до 50 км, в≥дм≥нною Ч дал≥ 50 км.
¬идим≥сть залежить в≥д таких фактор≥в:
а) прозорост≥ атмосфери, €ка залежить в свою чергу в≥д на€вност≥ в н≥й р≥зних др≥бних частинок (пилу, диму, вод€ного пару тощо; прозор≥сть знижуЇтьс€, наприклад п≥д час серпанку);
б) умов осв≥тленост≥ (сон€чно, хмарно, ранок, день, веч≥р);
в) контрастност≥ м≥ж в≥зирною ц≥ллю ≥ фоном, на €кий вона проектуЇтьс€.
утов≥ спостереженн€ дозвол€Їтьс€ виконувати при в≥дм≥нн≥й, добр≥й та задов≥льн≥й видимост≥. ѕри поган≥й видимост≥ (дощ, туман, сильний серпанок), тобто коли предмети видно не дал≥, н≥ж 15 км, спостереженн€ вести заборон€Їтьс€.
|
|
|
ќск≥льки в приземних шарах пов≥тр€ пост≥йно виникають конвекц≥йн≥ потоки, €к≥ викликан≥ зм≥ною температури земноњ поверхн≥ ≥ пов≥тр€, абсолютно непорушного зображенн€ в≥зирноњ ц≥л≥ в труб≥ практично не буваЇ. –озр≥зн€ють три види зображенн€: спок≥йне, злегка хитке, сильно хитке.
—пок≥йне зображенн€, коли в≥зирна ц≥ль в труб≥ нерухома або ледь тремтить. «легка хитке Ч коли зображенн€ в≥зирноњ ц≥л≥ ледь коливаЇтьс€, але не виходить за меж≥ б≥сектора. —ильно хитке Ч €кщо ампл≥туда коливанн€ зображенн€ в≥зирноњ ц≥л≥ перевищуЇ ширину б≥сектора.
—постереженн€ дозвол€Їтьс€ виконувати лише при спок≥йних та злегка хитких зображенн€х, причому вважаЇтьс€, що при спок≥йних зображенн€х вплив рефракц≥њ б≥льший, н≥ж при злегка хитких.
Ќайб≥льш спри€тлив≥ пер≥оди доби дл€ кутових спостережень
якщо вести спостереженн€ в найб≥льш спри€тлив≥ пер≥оди доби, тод≥ будуть найкращ≥ умови дл€ спостережень ≥ найб≥льш послаблений вплив на кутов≥ спостереженн€ р≥зноман≥тних фактор≥в, а саме рефракц≥њ, близькост≥ предмет≥в, закручуванн€ та вигинанн€ сигнал≥в, видимост≥ та коливанн€ зображенн€.
“акими пер≥одами Ї години, про €к≥ згадувалось ран≥ше: вранц≥ Ч пром≥жок часу, що починаЇтьс€ 0,5 год. п≥сл€ сходу —онц€ ≥ триваЇ 2Ц3 години, ввечер≥ Ч пром≥жок часу, що починаЇтьс€ о 16Ц17 годин≥ ≥ зак≥нчуЇтьс€ за 0,5 години перед заходом —онц€.
2.4.7 —постереженн€ ор≥Їнтирних пункт≥в
¬ п≥дрозд≥л≥ 2.3 було описано призначенн€ ор≥Їнтирних пункт≥в (ќ–ѕ) на пунктах тр≥ангул€ц≥њ, подано тип центру ќ–ѕ (рис. 2.13 ≥ його зовн≥шнЇ оформленн€ (рис. 2.20).
ѕри виконанн≥ кутових вим≥р≥в на пунктах тр≥ангул€ц≥њ в програму спостережень включають також ќ–ѕ. ѓх спостер≥гають трьома заходами з двома будь-€кими напр€мками, що вим≥рюютьс€ на даному пункт≥.
Ќад центром ќ–ѕ встановлюють на штативах добре пов≥рен≥ оптичн≥ виски або марки.
«астосовують т≥ ж прилади, що ≥ дл€ вим≥рюванн€ кут≥в у мереж. –≥зниц≥ напр€мк≥в на ќ–ѕ м≥ж заходами не повинн≥ перевищувати 6″.
¬им≥р€н≥ горизонтальн≥ напр€мки використовуютьс€ дл€ знаходженн€ дирекц≥йних кут≥в на ќ–ѕ.
¬≥ддал≥ з центру даного тр≥ангул€ц≥йного пункта до ќ–ѕ повинн≥ бути визначен≥ з точн≥стю до 1 м. ¬они вим≥рюютьс€ св≥тлов≥ддалем≥ром, стр≥чкою або рулеткою чи визначаютьс€ посередн≥м шл€хом. ƒл€ цього на м≥сцевост≥ розбиваЇтьс€ ≥ вим≥рюЇтьс€ базис ≥ в≥ддаль визначаЇтьс€ з простоњ побудови.
2.4.8 ѕопередн€ обробка кутових спостережень в тр≥ангул€ц≥њ
ѕопередн€ обробка кутових спостережень в тр≥ангул€ц≥њ складаЇтьс€ з таких основних операц≥й:
- перев≥рка журнал≥в кутових вим≥р≥в ≥ центрувальних лист≥в;
- складанн€ зведень вим≥рюванн€ горизонтальних кут≥в (напр€мк≥в) ≥ результат≥в вир≥внюванн€ спостережень на пункт≥;
- складанн€ робочоњ схеми мереж≥ тр≥ангул€ц≥њ;
- обчисленн€ поправок за центруванн€ ≥ редукц≥ю та напр€мк≥в, приведених на поверхню референц-ел≥псоњда та на площину в проекц≥њ √аусса- рюгера;
- оц≥нка точност≥ кутових вим≥р≥в.
2.4.8.1 ѕерев≥рка журнал≥в кутових вим≥р≥в ≥ центрувальних лист≥в
ѕольов≥ журнали ≥ центрувальн≥ листи Ї документами суворого обл≥ку, тому њх видача ≥ прийманн€ реЇструютьс€ у спец≥альних книгах обл≥ку, що збер≥гаютьс€ в начальника парт≥њ. —тор≥нки в журнал≥ мають бути пронумерован≥. ∆урнал ведетьс€ ч≥тким розб≥рливим почерком чорнилом або кульковою ручкою. Ќе допускаютьс€ виправленн€ у в≥дл≥ках. якщо при вим≥рах або в записах допущена помилка, вони акуратно перекреслюютьс€ (п≥д л≥н≥йку), ≥ вим≥ри зд≥йснюютьс€ заново.
Ќеправильн≥ обчисленн€ перекреслюютьс€ ≥ зверху записуютьс€ правильн≥ результати. ∆урнали оформл€ютьс€ зг≥дно з вимогами, п≥дписуютьс€ виконавц€ми.
|
|
|
«аписи та обчисленн€ в журналах ≥ на центрувальних листах перев≥р€ютьс€ в другу руку, що засв≥дчуЇтьс€ п≥дписом особи, €ка њх перев≥рила. ∆урнали ≥ центрувальн≥ листи п≥дл€гають здач≥ начальнику парт≥њ, €кий приймаЇ њх ≥ передаЇ в камеральну групу дл€ обробки.
2.4.8.2 —кладанн€ зведень вим≥рюванн€ горизонтальних кут≥в ≥ результат≥в вир≥внюванн€ спостережень на пункт≥
« журнал≥в спостережень виписують результати ус≥х вим≥р≥в напр€мк≥в або кут≥в, кр≥м €вно помилкових, обчислюють середн≥ (або вир≥вн€н≥) значенн€ з m заход≥в кожного кута (чи напр€мку, приведеного до початкового), виконують оц≥нку €кост≥ вим≥р€них кут≥в.
2.4.8.3 —кладанн€ робочоњ схеми мереж≥ тр≥ангул€ц≥њ
–обоча схема мереж≥ складаЇтьс€ на ватман≥ ол≥вцем або тушшю в зручному масштаб≥ (1:25000, 1:50000 чи 1:100000). Ќа схем≥ показують ус≥ пункти тр≥ангул€ц≥њ (виписують њх назви), нанос€ть вих≥дн≥ дирекц≥йн≥ кути, базиси (вих≥дн≥ сторони), напр€мки, €к≥ спостер≥галис€, виписують середн≥ (вир≥вн€н≥) значенн€ кут≥в або напр€мк≥в, приведених до початкового. —хема маЇ бути зручною дл€ користуванн€.
2.4.8.4 ќбчисленн€ поправок за центруванн€ та редукц≥ю та напр€мк≥в приведених до центр≥в пункт≥в
¬икористовуючи елементи приведенн€ на пунктах тр≥ангул€ц≥њ, за формулами (2.30)Ц(2.32), (2.34)Ц(2.36) обчислюють поправки за центруванн€ ≥ за редукц≥ю в кожен вим≥р€ний напр€мок ≥ отримують напр€мки, приведен≥ до центр≥в пункт≥в.
2.4.8.5 ѕриведенн€ вим≥р≥в на поверхню референц-ел≥псоњда та на площину в проекц≥њ √аусса- рюгера
”с≥ вим≥ри зд≥йснюютьс€ на ф≥зичн≥й поверхн≥ «емл≥, а координати пункт≥в мають бути приведен≥ до референц-ел≥псоњда (геодезичн≥) або на площину (пр€мокутн≥). ¬ звТ€зку з чим вим≥р€н≥ горизонтальн≥ напр€мки привод€тьс€ на поверхню референц-ел≥псоњда расовського або на площину в проекц≥њ √аусса- рюгера. ћетодика цих приведень вивчаЇтьс€ в курс≥ вищоњ геодез≥њ.
2.4.8.6 ќц≥нка точност≥ кутових вим≥р≥в
ќц≥нка точност≥ кутових вим≥р≥в зд≥йснюЇтьс€ шл€хом обчислень невТ€зок в трикутниках ≥ пор≥вн€нн€ њх з допустимими значенн€ми, €к≥ становл€ть 4″ ≥ 6″ в тр≥ангул€ц≥њ 2 ≥ 3 клас≥в в≥дпов≥дно.
ќбчислюЇтьс€ також середн€ квадратична помилка вим≥рюванн€ кут≥в за формулою ‘ерреро:

| (2.31) |
де w Ч невТ€зка в трикутниках;
n Ч к≥льк≥сть трикутник≥в.
¬еличина m не повинна перевищувати 1″ ≥ 1,5″ в 2 ≥ 3 класах тр≥ангул€ц≥њ в≥дпов≥дно.
2.5 ¬им≥рюванн€ зен≥тних в≥дстаней на пунктах тр≥ангул€ц≥њ ≥ њх попередн€ обробка
2.5.1 —уть ≥ призначенн€ тригонометричного н≥велюванн€
“ригонометричним н≥велюванн€м називають визначенн€ р≥зниц≥ висот двох точок м≥сцевост≥ за вим≥р€ним кутом нахилу (або зен≥тною в≥дстанню) напр€мку з одн≥Їњ точки на другу та в≥дом≥й чи вим≥р€н≥й горизонтальн≥й в≥дстан≥ м≥ж цими точками.
“ригонометричне н≥велюванн€ призначене:
- дл€ визначенн€ висот пункт≥в опорних геодезичних мереж ус≥х клас≥в на обТЇктах, де не передбачене геометричне н≥велюванн€;
- дл€ побудови висотних зн≥мальних мереж при топограф≥чних зн≥манн€х в г≥рських районах;
- дл€ розвТ€зуванн€ спец≥альних геодезичних задач.
” тр≥ангул€ц≥йних мережах вим≥рюють не кути нахилу, а зен≥тн≥ в≥дстан≥.
«ен≥тною в≥дстанню Z предмета називаЇтьс€ кут в центр≥ вертикального круга теодол≥та, утворений пр€мовисною л≥н≥Їю в дан≥й точц≥ ≥ напр€мком на предмет (рис. 2.34).
«г≥дно з рисунком: Z =90Ц a, де a Ч кут нахилу на даний предмет
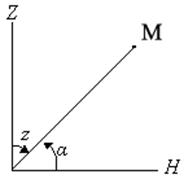
–исунок 2.34 - «вТ€зок м≥ж зен≥тною в≥дстанню ≥ кутом нахилу
‘ормула дл€ визначенн€ перевищенн€ Ќ 2Ц Ќ 1 маЇ вигл€д
| Ќ 2Ц Ќ 1= S ctgZ 1+(1Ц k 1) S ²/2 R + i 1Ц l 2, | (2.32) |
де
(1Ц k 1) S ²/2 R Ч поправка за вплив кривини «емл≥ ≥ вертикальноњ рефракц≥њ,
S Ч в≥ддаль м≥ж точками 1 ≥ 2,
z 1 Ч зен≥тна в≥дстань в точц≥ 1 на точку 2,
≥ 1 Ч висота приладу в точц≥ 1,
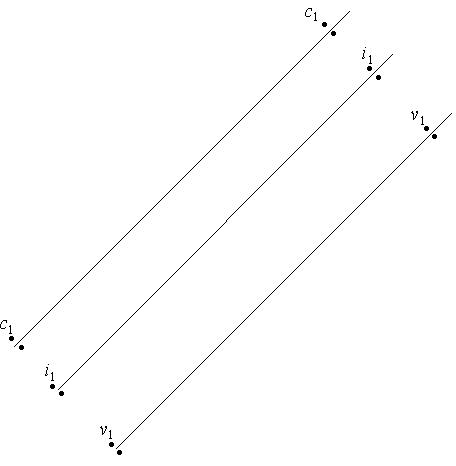
l 2 Ч висота в≥зирноњ ц≥л≥ в точц≥ 2 (рис. 2.35).

–исунок 2.35 - ќдностороннЇ тригонометричне н≥велюванн€
‘ормула (2.32) носить назву формули одностороннього тригонометричного н≥велюванн€ (њњ доведенн€ подаЇтьс€ в курс≥ У√еодез≥€ ч.≤≤Ф).
ѕроанал≥зуЇмо б≥льш детально, €к отримують кожен член формули (2.32).
2.5.2 ¬им≥рюванн€ зен≥тних в≥дстаней Z
2.5.2.1 Ќайб≥льш виг≥дний час дл€ вим≥рюванн€ зен≥тних в≥дстаней Z
“аким вважають пер≥оди ч≥тких зображень в≥зирних ц≥лей, €к≥ розпочинаютьс€ вранц≥ приблизно 2Ц2,5 години п≥сл€ сходу сонц€ ≥ продовжуютьс€ одну годину в сон€чну ≥ б≥л€ двох годин в хмарну погоду, ввечер≥ Ч це години з 16 до 18 м≥сцевого часу вл≥тку або з 15 до 17 весною та восени в сон€чну погоду. ¬ хмарну погоду, €кщо зображенн€ в≥зирних ц≥лей досить ч≥тк≥, початок веч≥рн≥х спостережень можна зсунути на одну годину до полудн€.
|
|
|
—л≥д в≥дм≥тити, що веч≥рн≥й пер≥од дл€ спостережень зен≥тних в≥ддалей кращий ранкового. ¬ цей пер≥од в≥зирн≥ ц≥л≥ ч≥тк≥ш≥ дл€ впевнених наведень горизонтальноњ нитки на верхн≥й зр≥з в≥зирного цил≥ндра.
2.5.2.2 ћетодика вим≥рюванн€ зен≥тноњ в≥ддал≥ на в≥зирну ц≥ль
«ен≥тн≥ в≥ддал≥ на в≥зирн≥ ц≥л≥ в тр≥ангул€ц≥йних мережах вим≥рюютьс€ чотирма заходами. —постереженн€ в одному заход≥ виконуютьс€ в так≥й посл≥довност≥:
1-й напр€мок при Ћ ≥ при ѕ,
2-й напр€мок при Ћ ≥ при ѕ,
.............................................
n -й напр€мок при Ћ ≥ при ѕ.
ћожлива ≥ така схема спостережень:
1-й напр€мок при Ћ ≥ при ѕ,
2-й напр€мок при ѕ ≥ при Ћ,
3-й напр€мок при Ћ ≥ при ѕ,
...........................................
n-й напр€мок при Ћ ≥ при ѕ, €кщо n Ч непарне
або при ѕ ≥ при Ћ, €кщо n Ч парне.
—постереженн€ на кожен з напр€мк≥в складаютьс€ з таких операц≥й:
а) при Ћ з допомогою м≥крометреного гвинта вертикального круга навод€ть горизонтальну нитку с≥тки на верхн≥й зр≥з в≥зирноњ ц≥л≥ напр€мку (наведенн€ виконують Уна загвинчуванн€Ф);
б) з допомогою м≥крометреного гвинта р≥вн€ при ал≥дад≥ вертикального круга точно сум≥щають зображенн€ к≥нц≥в бульбашки;
в) з допомогою барабанчика оптичного м≥крометра сум≥щають (Уна загвинчуванн€Ф) зображенн€ протилежних штрих≥в л≥мба ≥ беруть в≥дл≥ки по вертикальному круз≥ ≥ записують в журнал (градуси, хвилини, секунди);
г) повторюють д≥њ, викладен≥ в пунктах а, б, в (в журнал≥ записують лише секунди).
–≥зниц€ у в≥дл≥ках по оптичному м≥крометру при двох незалежних наведенн€х труби на в≥зирну ц≥ль не повинна перевищувати 3″ при спок≥йних ≥ 5″ при злегка хитких зображенн€х.
“руба переводитьс€ через зен≥т ≥ виконуютьс€ дл€ цього ж напр€мку ус≥ т≥ ж д≥њ, що ≥ в пунктах а, б, в, г при ѕ.
ѕрим≥тка. ѕри записах напр€мк≥в в журнал≥ необх≥дно вказувати, на €ку частину в≥зирноњ ц≥л≥ виконувалось наведенн€ (наприклад, в.в.ц., що означаЇ Уверх в≥зирноњ ц≥л≥Ф).
јналог≥чно виконуютьс€ спостереженн€ кожного з n напр€мки.
Ќе можна виконувати одразу ус≥ чотири заходи дл€ одного напр€мку, пот≥м чотири заходи по ≥ншому напр€мку ≥ т.д.
Ќе можна також в одному заход≥ при одному ≥ тому ж круз≥ одразу спостер≥гати ус≥ або к≥лька напр€мк≥в.
ƒо кожного наступного напр€мку переход€ть лише тод≥, коли дл€ попереднього напр€мку виконан≥ вим≥ри при обох кругах.
2.5.2.3 ќбробка результат≥в спостережень
¬ залежност≥ в≥д типу теодол≥та ≥ розм≥щенн€ п≥дпис≥в д≥лень на вертикальному круз≥ застосовують т≥ чи ≥нш≥ формули дл€ обчисленн€ м≥сц€ зен≥ту та зен≥тних в≥дстаней.
ƒл€ теодол≥т≥в “2, 2“2, 2“2ј застосовують формули:
 . .
| (2.33) |
ƒл€ теодол≥т≥в ќ“-02, ќ“02-ћ застосовуютьс€ формули:
 . .
| (2.34) |
онтролем €кост≥ вим≥рювань зен≥тних в≥дстаней служить величина коливанн€ м≥сц€ зен≥та MZ в одному заход≥ (вона не повинна перевищувати 15″) ≥ величина коливань зен≥тних в≥дстаней на один ≥ той же пункт в р≥зних заходах (вона не повинна перевищувати 15″).
2.5.3 ¬изначенн€ поправки за вплив кривини «емл≥ ≥ вертикальноњ рефракц≥њ
” формул≥ (2.32) ц€ поправка виражаЇтьс€ формулою:

| (2.35) |
≈кспериментальним шл€хом встановлено, що в пер≥оди доби, €к≥ рекомендуютьс€ дл€ тригонометричного н≥велюванн€, середнЇ значенн€ коеф≥ц≥Їнта k 1 приблизно дор≥внюЇ 0,14.
2.5.4 ¬изначенн€ довжин стор≥н
¬еличину S, €ка приймаЇ участь у формул≥ (2.32), можна обчислити за вим≥р€ною св≥тлов≥ддалем≥ром нахиленою в≥дстанню S ′ м≥ж пунктами 1 ≥ 2, €кщо в нењ ввести поправки:
- за нахил л≥н≥њ ∆ Sh;
- за приведенн€ на р≥вень мор€ ∆ SH;
- за приведенн€ на площину √ауса- рюгера ∆ Sy.
ѓх обчислюють за такими формулами:
 , ,
| (2.36) |
де υ Ч кут нахилу л≥н≥њ;
 , ,
| (2.37) |
де Hm =(H 1+ H 2)/2 Ч середн€ висота л≥н≥њ над р≥внем мор€, €ку обчислюють за наближеними в≥дм≥тками H 1, H 2 точок 1 ≥ 2, зн€тими з топограф≥чноњ карти, Rm Ч рад≥ус кривизни земногоел≥псоњда в середн≥й точц≥ m л≥н≥њ 1Ц2. ѓњ вибирають ≥з спец≥альних таблиць за в≥домою широтою точки m;
 , ,
| (2.38) |
де y Ч в≥ддаль середньоњ точки m л≥н≥њ 1Ц2 в≥д осьового мерид≥ана, €ку також визначають з карти.
ƒоведенн€ формули (2.36) подавалось в курс≥ У√еодез≥€ ч.≤Ф, а формул (2.37) ≥ (2.38) буде подано в курс≥ Уќснови вищоњ геодез≥њФ.
2.5.5 ¬изначенн€ висот прилад≥в ≥ в≥зирних ц≥лей
якщо спостереженн€ зен≥тних в≥дстаней виконуютьс€ з≥ штатива, то висота горизонтальноњ ос≥ теодол≥та вим≥рюЇтьс€ дв≥ч≥ рулеткою.
якщо спостереженн€ виконуютьс€ з≥ столика сигналу, то з допомогою рулетки вим≥рюЇтьс€ висота горизонтальноњ ос≥ теодол≥та над площиною столика.
¬исота столика ≥ висота верха в≥зирноњ ц≥л≥ над центром пункту визначаЇтьс€ безпосередньо або анал≥тично, в залежност≥ в≥д висоти знака ≥ його техн≥чного стану.
¬исоту верха в≥зирноњ ц≥л≥ (≥ столика сигналу) до 20 м можна вим≥рювати 20-метровою рулеткою з дотриманн€м правил техн≥ки безпеки. ¬им≥ри виконуютьс€ дв≥ч≥. ѕеред другим вим≥ром початковий в≥дл≥к рулетки трохи зсувають. ”с≥ в≥дл≥ки записують у журнал. ќстаточне значенн€ висоти закруглюють до 1 см.
¬исоти знак≥в, вищих 20 м, визначають анал≥тично. ƒл€ цього на м≥сцевост≥ зд≥йснюЇтьс€ побудова, у €к≥й висоти в≥зирного цил≥ндра ≥ столика знаход€тьс€ за кутами нахилу, вим≥р€ними теодол≥том, ≥ в≥ддал€ми в≥д теодол≥та до центра пункта ≥ до проекц≥й в≥зирного цил≥ндра та столика [7].
2.5.6 “очн≥сть тригонометричного н≥велюванн€
ѕомилка перевищенн€, що визначаЇтьс€ з тригонометричного н≥велюванн€ залежить, в основному, в≥д точност≥ зен≥тних в≥ддалей mz ≥ коеф≥ц≥Їнта вертикальноњ рефракц≥њ mk. ¬еличини S, R, ≥, l, €к≥ вход€ть в формулу одностороннього тригонометричного н≥велюванн€ (2.32), можна вважати безпомилковими. ўоб встановити, €к впливають на точн≥сть перевищенн€ помилки вим≥рюванн€ зен≥тних в≥дстаней ≥ коеф≥ц≥Їнта вертикальноњ рефракц≥њ, застосуЇмо до формули (2.32):
h = H 2Ц H 1= SctgZ 1+(1Ц k 1) S 2/2 R + ≥ 1Ц l 2,
формулу середньоњ квадратичноњ помилки функц≥њ:
| mh2=S 2/ sin 4 zm" 2 z / ρ" 2+ S 4 mk 2/4 R 2, |
де mh, mz, mk Ч в≥дпов≥дно середн≥ квадратичн≥ помилки перевищенн€, зен≥тноњ в≥ддал≥, коеф≥ц≥Їнта вертикальноњ рефракц≥њ. як правило, z близьке до 90º. “од≥ sinz =1. “од≥:
| mh2=S2mz"2/ρ2+S4mk2/4R2. | (2.39) |
якщо прийн€ти, що в найб≥льш спри€тлив≥ години доби зен≥тн≥ в≥ддал≥ вим≥рюють з помилкою mz =3″, а коеф≥ц≥Їнт рефракц≥њ к =0,14 беретьс€ з помилкою mk =0,03 м, то дл€ S =10 км отримаЇмо mh =0,3 м, а дл€ S =20 км
mh =1,0 м.
2.5.7 ƒвостороннЇ тригонометричне н≥велюванн€.
ƒл€ п≥двищенн€ точност≥ визначенн€ перевищенн€ м≥ж пунктами 1 ≥ 2 можна виконувати двостороннЇ тригонометричне н≥велюванн€, €ке передбачаЇ вим≥рюванн€ зен≥тних в≥дстаней на обох пунктах.
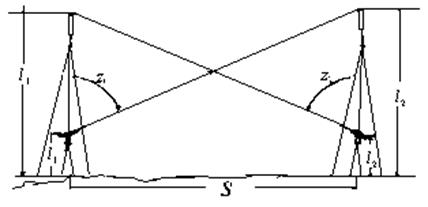
–исунок 2.36 - ƒвостороннЇ тригонометричне н≥велюванн€
якщо на пункт≥ 1 вим≥р€на зен≥тна в≥дстань Z 1 на пункт 2 (рис. 2.36), то перевищенн€ м≥ж пунктами 1 ≥ 2 можуть бути обчислен≥ за формулою одностороннього тригонометричного н≥велюванн€ (2.31)
 .
.
якщо на пункт≥ 2 вим≥р€на зен≥тна в≥дстань Z 2 на пункт 1, то перевищенн€ м≥ж пунктами 2 ≥ 1 можуть бути обчислен≥ за формулою одностороннього тригонометричного н≥велюванн€
 . .
| (2.40) |
¬ цих формулах: k 1 i k 2 Ч коеф≥ц≥Їнти вертикальноњ рефракц≥њ дл€ пункт≥в 1 ≥ 2; ≥ 1 та i 2 Ч висоти прилад≥в над центрами пункт≥в 1 ≥ 2; l 1 i l 2 Ч висоти в≥зирних ц≥лей над центрами пункт≥в 1 ≥ 2 в≥дпов≥дно.
—ереднЇ перевищенн€ м≥ж пунктами 1 ≥ 2 може бути обчислене за формулою
 . .
| (2.41) |
¬иконавши в≥дн≥манн€ в чисельнику формули (2.41), одержимо
 . .
| (2.42) |
—простимо вираз ctgZ 1- ctgZ 2, за в≥домими формулами тригонометр≥њ, а саме:
 .
.
ƒомножимо чисельник ≥ знаменник останнього многочлена на  .
.
Ѕудемо мати:
 ;
;
—торони в тр≥ангул€ц≥йних мережах по в≥дношенню до перевищень Ч велик≥, тому зен≥тн≥ в≥дстан≥ на сум≥жн≥ пункти, €к правило, близьк≥ до 90º, тому член  близький до 1. « врахуванн€м цього, запишемо:
близький до 1. « врахуванн€м цього, запишемо:  , ≥ формула двостороннього тригонометричного н≥велюванн€ отримаЇ вигл€д:
, ≥ формула двостороннього тригонометричного н≥велюванн€ отримаЇ вигл€д:

| (2.43) |
якщо спостереженн€ на пунктах тр≥ангул€ц≥њ 1 ≥ 2 будуть виконуватис€ в р≥зний час, то коеф≥ц≥Їнти вертикальноњ рефракц≥њ k 1 i k 2 дл€ обох пункт≥в будуть р≥зн≥, оск≥льки будуть р≥зн≥ метеоролог≥чн≥ умови спостережень.
якщо спостереженн€ виконуютьс€ в один ≥ той ж час, причому в найб≥льш спри€тлив≥ пер≥оди доби, тод≥ з певним наближенн€м можемо допустити, що k 2≈ k 1, тод≥ членом S 2(k 2- k 1)/4 R можна нехтувати ≥ формула двостороннього тригонометричного н≥велюванн€ приймаЇ вигл€д:
 . .
| (2.44) |
ѕ≥двищенн€ точност≥ визначенн€ перевищенн€ дос€гаЇтьс€ в звТ€зку з в≥дсутн≥стю у формул≥ (2.44) коеф≥ц≥Їнт≥в k 1 ≥ k 2.
2.5.8 ѕопередн€ обробка результат≥в тригонометричного н≥велюванн€ тр≥ангул€ц≥йних пункт≥в
ѕопередн€ обробка пол€гаЇ в обчисленн≥ пр€мих, зворотних перевищень м≥ж сум≥жними пунктами тр≥ангул€ц≥њ ≥ оц≥нц≥ €кост≥ отриманих результат≥в.
” випадку одностороннього тригонометричного н≥велюванн€ перевищенн€ м≥ж пунктами знаход€ть за формулою (2.31).
У»нструкци€ о построении государственных геодезических сетей 1, 2, 3 и 4 классовФ.ћ.Ф√”√ Ф, 1966 регламентувала допустиму р≥зницю м≥ж пр€мим ≥ зворотн≥м перевищенн€м дл€ стор≥н довжиною до 10 км величиною 1 м. ƒл€ стор≥н з б≥льшою довжиною за допустиму р≥зницю м≥ж пр€мим ≥ зворотн≥м перевищенн€м рекомендуЇтьс€ брати величину
| ∆ hдоп =0,1 S, | (2.45) |
де S Ч довжина сторони в к≥лометрах. Ќаприклад, дл€ S =15 км
∆ hдоп =0,1×15=1,5 м.
—ереднЇ перевищенн€ знаход€ть за формулою:
 . .
| (2.46) |
«а середн≥ми перевищенн€ми р≥зниц€ми висот вих≥дних пункт≥в знаход€ть невТ€зки в трикутниках ≥ за. ЌевТ€зки мають бути не б≥льшими:
 (м), (м),
| (2.47) |
де [ S 2] Ч сума квадрат≥в довжин стор≥н, виражених в дес€тках к≥лометр≥в, €кщо вони б≥льш≥ 10 км, n Ч к≥льк≥сть стор≥н, менших 10 км.
—ередн≥ перевищенн€, €к≥ задовольн€ють вказан≥ допуски, беруть дл€ вир≥внюванн€ висот мереж≥.

