




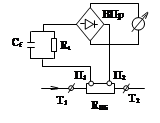
“1, “2 Ц токовые зажимы
ѕ1, ѕ2 Ц потенциальные зажимы
ќбщие св-ва приборов:
1) ”ниверсальность, многофункциональность, многопредельность;
2) ласс точности 0,2 и ниже (дополнительна€ погрешность определ€етс€ не идеальностью элементов выпр€млени€);
3) Ќеобходимость введени€ температурной и частотной компенсации
є15
Ёлектромагнитные приборы (устройство и теори€ измерительных механизмов, амперметры, вольтметры, основное уравнение, область применени€)
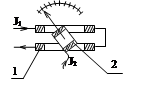
»ћ использует принцип взаимодействи€ магнитного пол€, создаваемого катушкой стоком и магнитного сердечника.
1- 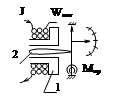 катушка
катушка
2- сердечник
1) ƒанное уравнение подтверждает физ. принцип  ;
;
2) ѕрибор измер€ет посто€нный и переменный ток  ;
;
3) Ўкала прибора квадратична€. ƒл€ выравнивани€ шкалы осуществл€етс€ математическа€ оптимизаци€ формы сердечника, чтобы скомпенсировать нелинейную зависимость;
4) “ак как L @ KL×(Wвитк)2 то

”равнение показывает, что a пропорционально ампер-виткам (J×Wвитков). Ёто дает возможность расшир€ть пределы измерени€ в пределах номинальных ампер-витков, путем подбора соответствующих значений тока и числа витков (J×Wвитков) ном.;
5) Ќа базе данного »ћ выполн€ютс€ измерители тока и напр€жени€ в широких пределах;
6) ƒостижимый класс точности 0.5
ѕриборы выполн€ют классов 0,5; 1; Е;
7) »сточниками дополнительной погрешности есть:
-частота или форма измер€емого сигнала;
 |
-внешние магнитные пол€;
ƒл€ устранени€ вли€ни€ магнитного пол€ используют экранирование (это дорого) или астазирование (на шкале такого прибора пишут астатический)
 |
8). Ќа показани€ прибора в малой степени вли€ют температура, влажность, вибрации;
—ердечник должен быть магнитом€гким и иметь малые потери на гистерезис и вихревые токи.
ќдной из модификаций есть логометры, на базе которых могут быть выполнены фазометры и другие приборы.
 |
є16
Ёлектромагнитные логометры и приборы на их основе Ц схемы, теори€, св-ва, область применени€
Ћогометр Ц прибор, который измер€ет отношение двух величин (УlogosФ-отношение).
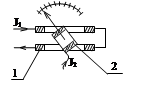
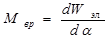
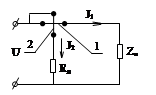
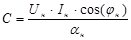
‘азометры работают на принципе логометров,. —хема его включений в цепь показана на рисунке
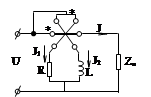 |
ќбмотки наматываютс€ так, чтобы моменты ћ1 и ћ2 были направлены друг к другу. –авновесие подвижной системы наступает при равенстве
ћвр1= ћвр2
 |


g = 90∞ - рамки скреплены под углом 90∞
ћвр1= ћвр2

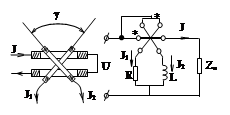
 — учетом ¬“ƒ:
— учетом ¬“ƒ:

ѕри условии J1 =J2 получим:
ctg j = ctg a
a = j уравнение фазометра
‘азометр Ц это прибор, который преобразует электрический угол в равный механический
‘азометры могут иметь одностороннюю (0...90∞) или двухстороннюю (-90∞ 0 +90∞) шкалу, котора€ позвол€ет выполн€ть измерени€ при любом характере нагрузки (емкостна€, индуктивна€) и не требует переключател€ направлени€ тока.
»сточником дополнительной погрешности есть изменение частоты, формы напр€жени€ (тока) т.к. J1 =J2 только при w=const
|
|
|
ѕоэтому фазометры примен€ют в цеп€х с частотой в пределах 45 ¸55 √ц
ласс точности не выше 0.5
є17
Ёлектростатические приборы (устройство »ћ, уравнение шкалы, св-ва, область применени€)
»спльзуетс€ принцип электростатического взаимодействи€ конструктивных элементов. ¬качестве конструктивных элементов используютс€ пластины различной формы, электроды правильной и неправильной формы.
Ё¬ѕ- электрод высокого потенциала
ЁЌѕ- электрод низкого потенциала
1-электроды
2-магнитоиндукционный успокоитель
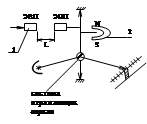
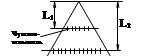
—истема отсчета- светова€. »спользуетс€ дл€ увеличени€ чувствительности »ћ и точности измерений.
ƒлина L2 моделируетс€ многократным отражением дл€ увеличени€ чувствительности. ѕри этом шкала может быть линейна€ и сферическа€.
-  линейна€
линейна€
-
 - сферическа€
- сферическа€
ƒанный »ћ позвол€ет измер€ть разность потенциалов или напр€жени€ дл€ цепей посто€нного и переменного тока, при этом шкала прибора квадратична. ƒл€ выравнивани€ шкалы примен€ютс€ электроды особой формы.
ƒанный »ћ служит основой выполнени€ вольтметров в широких пределах 10 ¬ ¸ 100 к¬. ѕоэтому есть одним из основных приборов высоковольтных измерений. ѕри этом есть возможность мен€ть пределы измерени€, измен€€ рассто€ние l.
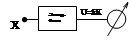
ƒл€ расширени€ функциональных возможностей выполн€ютс€ комбинированые приборы, сочетающие электронный блок (котор. преобразует входную величинуїkx) и электростатический »ћ
є18
Ёлектродинамические приборы (устройство и принцип действи€ »ћ, уравнение шкалы на посто€нном токе, особенности, область применени€)
ƒанный »ћ использует принцип взаимодействи€ эл. котуров, обтекаемых током.
1- неподвижна€ катушка
2-подвижна€ катушка


Mпр=D×a
 (1)
(1)
”равнение (1) показывает, что a пропорционально произведению токов и изменению взаимоиндуктивности.
ƒл€ исключени€ зависимости  используют катушки такой формы, что дает возможность считать
используют катушки такой формы, что дает возможность считать  в диапазоне шкалы [0-a]
в диапазоне шкалы [0-a]
 (2)
(2)
≈сли J1=J2=J, то
 (2 `)
(2 `)
ƒл€ посто€нного тока a соответствует выражени€м (2) и (2 `).
Ёто подтверждает квадратичность шкалы. ¬ыравнивание осуществл€етс€ формой катушек.
ќбщие св-ва приборов:
1) ѕриборы эл.-динам. системы выполн€ютс€ дл€ измерени€ практически всех эл. величин в широких пределах.
2) Ёто наиболее точные приборы дл€ цепей переменного тока, с классами 0.5 и выше, и поэтому часто €вл€ютс€ контрольно-поверочными
3) ѕриборы потребл€ют относительно малую мощность, что определ€ет низкий уровень методической погрешности
4) Ќа показани€ прибора вли€ют (дополнительна€ погрешность) - частота, форма измер€емого сигнала, внешние магн. пол€, а также могут вли€ть температура, влажность, механические воздействи€.
є19
Ёлектродинамические приборы (устройство и принцип действи€ измерительного механизма на переменном токе, уравнение шкалы, схемы включени€ обмоток, область применени€)
ƒанный »ћ использует принцип взаимодействи€ эл. котуров, обтекаемых током.
1- неподвижна€ катушка
2-подвижна€ катушка
Mпр=D×a
(1)
”равнение (1) показывает, что a пропорционально произведению токов и изменению взаимоиндуктивности.
ƒл€ исключени€ зависимости используют катушки такой формы, что дает возможность считать в диапазоне шкалы [0-a]
≈сли J1=J2=J, то
Ёто подтверждает квадратичность шкалы. ¬ыравнивание осуществл€етс€ формой катушек.
 ƒл€ переменного тока:
ƒл€ переменного тока:
|
|
|
i1=Jm1×sin(wt)
i2=Jm2×sin(wt-y)

ћt Ц мгновенный момент

Mвр= 2×J1×J2×cos(y)
J1 и J2 - действующие значени€ токов.
“огда a по переменному току
 —хемы включени€ обмоток
—хемы включени€ обмоток
1. последовательное соединение катушек
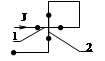
J=J1=J2
Cos(y)=1
a=K1×J2
Ћегко замен€етс€ на a=KU×U2
ƒанное соединение можно использовать дл€
јмперметров до 5 ј
¬ольтметров до 600 ¬
ѕри этом показани€ на посто€нном и переменном токе одинаковы
2. ѕараллельное соединение
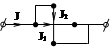 |
”гол отклонени€ пропорционален квадрату действующего значени€ измер€емого тока
ƒанное соединение можно использовать дл€
јмперметров до 10 ј
¬ольтметров до 100 ¬
3. комбинированное соединение:
1- неподвижна€ обмотка (токова€), включаетс€ последовательно
2- подвижна€ обмотка (напр€жени€)

или приблизительно

“аким образом такое соединение измер€ет активную мощность и соответствует ваттметру.
ѕри этом в отличии от других приборов этой системы, шкала ваттметра равномерна€
÷ена делени€ прибора (при cos(j)=1)

ƒл€ низко косинусных ваттметров
є20
Ћогометры электродинамической системы (устройство »ћ, уравнение шкалы, приборы на их основе, св-ва, область применени€).
Ћогометр Ц прибор, который измер€ет отношение двух величин (УlogosФ-отношение).
‘азометры работают на принципе логометров
”стройство фазометра
 |
ќбмотки наматываютс€ так, чтобы моменты ћ1 и ћ2 были направлены друг к другу. –авновесие подвижной системы наступает при равенстве
ћвр1= ћвр2

g = 90∞ - рамки скреплены под углом 90∞
ћвр1= ћвр2
— учетом ¬“ƒ:
ѕри условии J1 =J2 получим:
ctg j = ctg a
a = j уравнение фазометра
‘азометр Ц это прибор, который преобразует электрический угол в равный механический
‘азометры могут иметь одностороннюю (0...90∞) или двухстороннюю (-90∞ 0 +90∞) шкалу, котора€ позвол€ет выполн€ть измерени€ при любом характере нагрузки (емкостна€, индуктивна€) и не требует переключател€ направлени€ тока.
»сточником дополнительной погрешности есть изменение частоты, формы напр€жени€ (тока) т.к. J1 =J2 только при w=const
ѕоэтому фазометры примен€ют в цеп€х с частотой в пределах 45 ¸55 √ц
ласс точности не выше 0.5

