




A. ѕример 11a
–ешить методом начальных параметров пример 1a. —равнить решение с аналитическим. ѕостроить графики.
»спользуем программу дл€ примера 1a дл€ составлени€ этой программы. ¬водим исходные данные. –ешаем пример 1a и заполн€ем таблицу.
clear all
format long
disp('–ешаем пример 11a')
nnp = 10; % число точек интегрировани€
syms x y Dy D2y % описали символические переменные
F = x^2+y^2+Dy^2; % подвнтегральна€ функци€
x1 = -1;
y1 = 1;
x2 = 1;
y2 = 2;
fprintf('ѕодынтегральна€ функци€: F=%s\n',char(F))
fprintf('√раничные услови€: y(%d)=%d; y(%d)=%d\n',x1,y1,x2,y2)
dFdy = diff(F,y);
dFdy1 = diff(F,Dy);
d_dFdy1_dx = diff(dFdy1,x);
d_dFdy1_dy = diff(dFdy1,y);
d_dFdy1_dy1 = diff(dFdy1,Dy); % d(dF/dy')/dy'
dFy1dx = d_dFdy1_dx + d_dFdy1_dy*Dy + d_dFdy1_dy1*D2y;
Euler = simple(dFdy-dFy1dx);
deqEuler = [ char(Euler) '=0' ]; % составили уравнение
Sol = dsolve(deqEuler,'x'); % решаем уравнение Ёйлера
if length(Sol)~=1 % решений нет или более одного
error('Ќет решений или более одного решени€!');
end
SolLeft = subs(Sol,x,sym(x1));
SolRight = subs(Sol,x,sym(x2));
EqLeft = [char(SolLeft) '=' char(sym(y1))];
EqRight = [char(SolRight) '=' char(sym(y2))];
Con = solve(EqLeft,EqRight); % решаем систему
C1 = Con.C1;
C2 = Con.C2;
Sol1a = vpa(eval(Sol),14);
xpl = linspace(x1,x2);
y1a=subs(Sol1a,x,xpl);
–ешаем пример 11a
ѕодынтегральна€ функци€: F=x^2+y^2+Dy^2
√раничные услови€: y(-1)=1; y(1)=2
ƒл€ применени€ решателей систем дифференциальных уравнений приводим уравнение Ёйлера 2-го пор€дка к системе 2-х дифференциальных уравнений 1-го пор€дка путЄм замены
 (11.4)
(11.4)
ƒл€ этого решаем дифференциальное уравнение Ёйлера относительно y ¢¢ и формируем правые части системы дифференциальных уравнений. «аписываем их в файл.
f2 = solve(deqEuler,D2y); % решаем относительно y''
f2 = subs (f2, {y,Dy}, {sym('y(1)'),sym('y(2)')});
rp{1} = 'function dydx = MyRightPart(x,y)';
rp{2} = 'dydx=zeros(2,1);';
rp{3} = 'dydx(1)=y(2);';
rp{4} = [ 'dydx(2)=' char(f2) ';' ];
disp('“екст файла MyRightPart.m')
fprintf ('%s\n', rp{:});
fid = fopen ('C:\Iglin\Matlab\MyRightPart.m', 'w');
fprintf (fid, '%s\n', rp{:});
fclose(fid); % закрываем файл
“екст файла MyRightPart.m
function dydx = MyRightPart(x,y)
dydx=zeros(2,1);
dydx(1)=y(2);
dydx(2)=y(1);
ћы сформировали систему дифференциальных уравнений
 (11.5)
(11.5)
где в нашем случае x 1=-1; x 2=1. ≈сли бы было известно начальное условие y 2(x 1), то эту систему можно было бы решить с помощью стандартных численных методов. ќбозначим y 2(x 1) как неизвестную величину: t = y 2(x 1). ѕрисвоив ей какое-либо пробное значение, можно решить систему дифференциальных уравнений и найти функцию f = y 1(x 2)-2. ќчевидно, f можно рассматривать как функцию от t. “о есть нужно решить уравнение f (t)=0. ¬ нашем случае, когда исходна€ система дифференциальных уравнений €вл€етс€ линейной, уравнение относительно t также будет линейным. “о есть функци€ f (t) имеет структуру f (t)= at + b. „тобы построить эту функцию, нужно решить 2 начальные задачи дл€ t =0 и t =1. –ешаем эти задачи.
|
|
|
xr = linspace(x1,x2,nnp+1); % точки дл€ численного решени€
y0 = [y1,0]; % решаем —ƒ” при y'(x1)=0;
[xx,YY] = ode45('MyRightPart',xr,y0);
yend0 = YY(nnp+1,1)-y2
y0 = [y1,1]; % решаем —ƒ” при y'(x1)=1;
[xx,YY] = ode45('MyRightPart',xr,y0);
yend1 = YY(nnp+1,1)-y2
yend0 =
1.76219612254200
yend1 =
5.38905701685360
—истема линейных уравнений (11.3) в данном случае состоит из одного уравнени€. ƒл€ нахождени€ неизвестного t = y 2(x 1) проводим линейную интерпол€цию.
y0 = [y1,yend0/(yend0-yend1)]
y0 =
1.00000000000000 -0.48587364497652
–ешаем систему дифференциальных уравнений при найденных действительных начальных услови€х. —троим график.
[xx,YY] = ode45('MyRightPart',xr,y0);
plot (xpl,y1a,'--b', xr,YY(:,1),'-r')
title ('\bfExample 11a') % заголовок
xlabel('x')
ylabel('y(x)') % метки осей
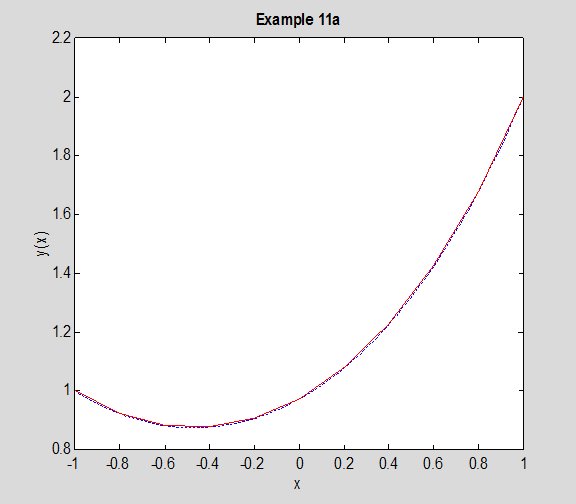
–ис. 11.2. –ешение примера 11a
ќтвет. √рафик экстремали показан на рис.11.2 сплошной красной линией. Ўтрихова€ син€€ лини€ Ц решение примера 1a. ¬идно, что в точках, где печатаетс€ численное решение, оно сливаетс€ с аналитическим. Ќеизвестное начальное условие: y ¢(x 1)=-0.48587364.
B. ѕример 11b
–ешить методом начальных параметров пример 2. —равнить решение с аналитическим. ѕостроить графики.
ѕрограмму дл€ этого примера напишем на основе программы дл€ примера 2 с использованием программы дл€ примера 11a. Ќаходим аналитическое решение примера 2. «аполн€ем таблицу.
clear all
format long
disp('–ешаем пример 11b')
nnp = 10; % число точек интегрировани€
syms x y z Dy D2y Dz D2z % описали переменные
F = Dy^2+Dz^2+2*y*z; % подынтегральна€ функци€
x1 = -2;
y1 = 1;
z1 = 0;
x2 = 2;
y2 = 0;
z2 = 2;
fprintf('ѕодынтегральна€ функци€: F=%s\n',char(F))
fprintf('√раничные услови€ слева: y(%d)=%d; z(%d)=%d\n',x1,y1,x1,z1)
fprintf('√раничные услови€ справа: y(%d)=%d; z(%d)=%d\n',x2,y2,x2,z2)
dFdy = diff(F,y);
dFdy1 = diff(F,Dy);
d_dFdy1_dx = diff(dFdy1,x); % d(dF/dy')/dx
d_dFdy1_dy = diff(dFdy1,y);
d_dFdy1_dy1 = diff(dFdy1,Dy);
d_dFdy1_dz = diff(dFdy1,z);
d_dFdy1_dz1 = diff(dFdy1,Dz);
dFy1dx = d_dFdy1_dx + d_dFdy1_dy*Dy + d_dFdy1_dy1*D2y + d_dFdy1_dz*Dz + d_dFdy1_dz1*D2z;
dFdz = diff(F,z);
dFdz1 = diff(F,Dz);
d_dFdz1_dx = diff(dFdz1,x); % d(dF/dz')/dx
d_dFdz1_dy = diff(dFdz1,y);
d_dFdz1_dy1 = diff(dFdz1,Dy);
d_dFdz1_dz = diff(dFdz1,z);
d_dFdz1_dz1 = diff(dFdz1,Dz);
dFz1dx = d_dFdz1_dx + d_dFdz1_dy*Dy + d_dFdz1_dy1*D2y + d_dFdz1_dz*Dz + d_dFdz1_dz1*D2z;
EulerY = simple(dFdy-dFy1dx);
EulerZ = simple(dFdz-dFz1dx);
deqEulerY = [char(EulerY) '=0']; % уравнение Y
deqEulerZ = [char(EulerZ) '=0']; % уравнение Z
Sol = dsolve(deqEulerY,deqEulerZ,'x'); % решаем
if length(Sol)~=1 % решений нет или более одного
error('Ќет решений или более одного решени€!');
end
SolLeftY = subs(Sol.y,x,sym(x1)); % x1 в y
SolLeftZ = subs(Sol.z,x,sym(x1)); % x1 в z
SolRightY = subs(Sol.y,x,sym(x2)); % x2 в y
SolRightZ = subs(Sol.z,x,sym(x2)); % x2 в z
EqLeftY = [char(vpa(SolLeftY,14)) '=' char(sym(y1))];
EqLeftZ = [char(vpa(SolLeftZ,14)) '=' char(sym(z1))];
EqRightY = [char(vpa(SolRightY,14)) '=' char(sym(y2))];
|
|
|
EqRightZ = [char(vpa(SolRightZ,14)) '=' char(sym(z2))];
Con = solve(EqLeftY,EqLeftZ,EqRightY,EqRightZ);
C1 = Con.C1;
C2 = Con.C2;
C3 = Con.C3;
C4 = Con.C4;
Sol2Y = vpa(eval(Sol.y),14);
Sol2Z = vpa(eval(Sol.z),14);
xpl = linspace(x1,x2); % массив абсцисс
y2a = subs(Sol2Y,x,xpl);
z2a = subs(Sol2Z,x,xpl);
–ешаем пример 11b
ѕодынтегральна€ функци€: F=Dy^2+Dz^2+2*y*z
√раничные услови€ слева: y(-2)=1; z(-2)=0
√раничные услови€ справа: y(2)=0; z(2)=2
—ведЄм систему 2-х дифференциальных уравнений Ёйлера 2-го пор€дка к системе 4-х нормальных дифференциальных уравнений 1-го пор€дка вида (11.1). –ешим уравнени€ Ёйлера относительно y ¢¢, z ¢¢. ѕодставим в оба уравнени€ y, z, y ¢, z ¢. —формируем правые части дл€ системы дифференциальных уравнений и запишем их в файл.
f2yz = solve(deqEulerY,deqEulerZ,D2y,D2z);
f2=subs(f2yz.D2y,{y,Dy,z,Dz},{sym('y(1)'),sym('y(2)'),sym('y(3)'),sym('y(4)')});
f4=subs(f2yz.D2z,{y,Dy,z,Dz},{sym('y(1)'),sym('y(2)'),sym('y(3)'),sym('y(4)')});
rp{1} = 'function dydx = MyRightPart(x,y)';
rp{2} = 'dydx=zeros(4,1);';
rp{3} = 'dydx(1)=y(2);';
rp{4} = [ 'dydx(2)=' char(f2) ';' ];
rp{5} = 'dydx(3)=y(4);';
rp{6} = [ 'dydx(4)=' char(f4) ';' ];
disp('“екст файла MyRightPart.m')
fprintf('%s\n',rp{:});
fid = fopen ('C:\Iglin\Matlab\MyRightPart.m', 'w');
fprintf(fid,'%s\n',rp{:});
fclose(fid); % закрываем файл
“екст файла MyRightPart.m
function dydx = MyRightPart(x,y)
dydx=zeros(4,1);
dydx(1)=y(2);
dydx(2)=y(3);
dydx(3)=y(4);
dydx(4)=y(1);
ѕрименим метод начальных параметров дл€ решени€ задачи. Ќеизвестные у нас обозначены
 (11.6)
(11.6)
¬ начальной точке x 1 неизвестны y 2(x 1)= t 1 и y 4(x 1)= t 2. ЌайдЄм их из решени€ системы 2-х уравнений
 (11.7)
(11.7)
—истема дифференциальных уравнений Ёйлера у нас €вл€етс€ линейной, поэтому и система уравнений (11.7) также будет линейной.
 (11.8)
(11.8)
ЌайдЄм коэффициенты этой системы и правые части.
xr = linspace(x1,x2,nnp+1); % точки дл€ численного решени€
A = zeros(2,2); % матрица системы уравнений
b = zeros(2,1); % вектор правых частей
y0 = [y1;0;z1;0]; % решаем —ƒ” при y'(x1)=0; z'(x1)=0;
[xx,YY] = ode45('MyRightPart',xr,y0);
b=YY(nnp+1,[1 3])' - [y2;z2]
y0 = [y1;1;z1;0]; % решаем —ƒ” при y'(x1)=1; z'(x1)=0;
[xx,YY] = ode45('MyRightPart',xr,y0);
A(:,1) = YY(nnp+1,[1 3])'-[y2;z2]-b;
y0 = [y1;0;z1;1]; % решаем —ƒ” при y'(x1)=0; z'(x1)=1;
[xx,YY] = ode45('MyRightPart',xr,y0);
A(:,2) = YY(nnp+1,[1 3])'-[y2;z2]-b
b =
13.32736606398895
11.98099902570117
A =
13.26662430099436 14.02342479230629
14.02342479230629 13.26662430099436
–ешаем систему линейных уравнений (11.8), находим недостающие начальные услови€. ƒл€ этих начальных условий решаем систему дифференциальных уравнений вида (11.1) и строим график полученного решени€.
yz0 = -A\b; % нашли начальные услови€
y0 = [y1;yz0(1);z1;yz0(2)] % истинные начальные услови€
[xx,YY] = ode45('MyRightPart',xr,y0); % решаем
plot3(xpl,y2a,z2a,'--b',xr,YY(:,1),YY(:,3),'-r')
title ('\bfExample 11b') % заголовок
xlabel('x')
ylabel('y(x)')
zlabel('z(x)')
view(205,30)
grid on
box on
y0 =
1.00000000000000
0.42582034231673
-1.35320471612876
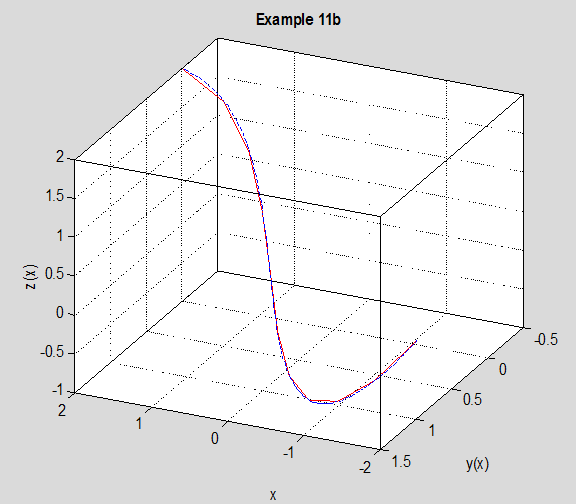
–ис. 11.3. –ешение примера 11b
ќтвет. √рафик экстремали показан на рис.11.3 сплошной красной линией. ќн практически сливаетс€ с решением примера 2, которое показано штриховой синей линией. Ќеизвестные начальные услови€: y ¢(x 1)=0.42582; z ¢(x 1)=-1.35320.
C. ѕример 11c
–ешить методом начальных параметров пример 3. —равнить решение с аналитическим. ѕостроить графики.
”равнение Ёйлера (3.6) €вл€етс€ уравнением 4-го пор€дка с 2-м€ граничными услови€ми на левом конце и 2-м€ на правом. —ведЄм его к нормальной системе 4-х уравнений 1-го пор€дка заменой
 (11.9)
(11.9)
Ќеизвестные начальные услови€ t 1= y 3(x 1) и t 2= y 4(x 1) найдЄм из решени€ системы уравнений
|
|
|
 (11.10)
(11.10)
“ак как уравнение (3.6) линейное, то и система (11.10) будет линейной. –еша€ еЄ, найдЄм начальные услови€, а затем и решение уравнени€ Ёйлера.
ƒл€ составлени€ программы используем программы дл€ примеров 3 и 11b. ¬начале повтор€ем решение примера 3.
clear all
format long
disp('–ешаем пример 11c')
nnp = 10;
syms x y Dy D2y D3y D4y % описали переменные
F = D2y^2-2*Dy^2+4*y*Dy+y^2-2*y*sin(x);
x1 = -1;
y1 = 1;
Dy1 = -1;
x2 = 1;
y2 = 2;
Dy2 = 1;
fprintf('ѕодынтегральна€ функци€: F=%s\n',char(F))
fprintf('√раничные услови€ слева: y(%d)=%d; y''(%d)=%d\n',x1,y1,x1,Dy1)
fprintf('√раничные услови€ справа: y(%d)=%d; y''(%d)=%d\n',x2,y2,x2,Dy2)
dFdy = diff(F,y);
dFdy1 = diff(F,Dy);
dFdy2 = diff(F,D2y); % dF/dy''
d_dFdy1_dx = diff(dFdy1,x); % d(dF/dy')/dx
d_dFdy1_dy = diff(dFdy1,y); % d(dF/dy')/dy
d_dFdy1_dy1 = diff(dFdy1,Dy); % d(dF/dy')/dy'
d_dFdy1_dy2 = diff(dFdy1,D2y); % d(dF/dy')/dy''
dFy1dx = d_dFdy1_dx + d_dFdy1_dy * Dy + d_dFdy1_dy1 * D2y + d_dFdy1_dy2*D3y;
d_dFdy2_dx = diff(dFdy2,x); % d(dF/dy'')/dx
d_dFdy2_dy = diff(dFdy2,y); % d(dF/dy'')/dy
d_dFdy2_dy1 = diff(dFdy2,Dy); % d(dF/dy'')/dy'
d_dFdy2_dy2 = diff(dFdy2,D2y); % d(dF/dy'')/dy''
dFy2dx = d_dFdy2_dx + d_dFdy2_dy * Dy + d_dFdy2_dy1 * D2y + d_dFdy2_dy2 * D3y;
d_dFdy2dx_dx = diff(dFy2dx,x); % d((dFy'')/dx)/dx
d_dFdy2dx_dy = diff(dFy2dx,y); % d((dFy'')/dx)/dy
d_dFdy2dx_dy1 = diff(dFy2dx,Dy); % d((dFy'')/dx)/dy'
d_dFdy2dx_dy2 = diff(dFy2dx,D2y); % d((dFy'')/dx)/dy''
d_dFdy2dx_dy3 = diff(dFy2dx,D3y); % d((dFy'')/dx)/dy'''
d2Fy2dx2 = d_dFdy2dx_dx + d_dFdy2dx_dy * Dy + d_dFdy2dx_dy1 * D2y + d_dFdy2dx_dy2 * D3y + d_dFdy2dx_dy3 * D4y;
Euler = simple(dFdy-dFy1dx+d2Fy2dx2);
deqEuler = [char(Euler) '=0']; % составили уравнение
Sol = dsolve (deqEuler, 'x');
if length(Sol)~=1 % решений нет или более одного
error('Ќет решений или более одного решени€!');
end
dydx = diff(Sol,x); % нашли производную
slY = subs(Sol,x,sym(x1));
slDY = subs(dydx,x,sym(x1));
srY = subs(Sol,x,sym(x2));
srDY = subs(dydx,x,sym(x2));
elY = [char(vpa(slY,14)) '=' char(sym(y1))];
elDY = [char(vpa(slDY,14)) '=' char(sym(Dy1))];
erY = [char(vpa(srY,14)) '=' char(sym(y2))];
erDY = [char(vpa(srDY,14)) '=' char(sym(Dy2))];
Con = solve(elY,elDY,erY,erDY);
C1 = Con.C1;
C2 = Con.C2;
C3 = Con.C3;
C4=Con.C4;
Sol3 = vpa(eval(Sol),14); % подставл€ем C1-C4;
xpl = linspace(x1,x2);
y3 = subs(Sol3,x,xpl);
–ешаем пример 11c
ѕодынтегральна€ функци€: F=D2y^2-2*Dy^2+4*y*Dy+y^2-2*y*sin(x)
√раничные услови€ слева: y(-1)=1; y'(-1)=-1
√раничные услови€ справа: y(1)=2; y'(1)=1
–азрешаем уравнение Ёйлера относительно yIV и подставл€ем в него обозначени€ (11.9). ‘ормируем правые части дл€ системы дифференциальных уравнений, к которой сводитс€ уравнение Ёйлера. «аписываем их в файл.
f4 = solve(deqEuler,D4y); % находим D4y
f4 = subs(f4,{y,Dy,D2y,D3y},{sym('y(1)'),sym('y(2)'),sym('y(3)'),sym('y(4)')});
rp{1} = 'function dydx = MyRightPart(x,y)';
rp{2} = 'dydx=zeros(4,1);';
rp{3} = 'dydx(1)=y(2);';
rp{4} = 'dydx(2)=y(3);';
rp{5} = 'dydx(3)=y(4);';
rp{6} = [ 'dydx(4)=' char(f4) ';' ];
disp('“екст файла MyRightPart.m')
fprintf('%s\n',rp{:});
fid = fopen ('C:\Iglin\Matlab\MyRightPart.m', 'w');
fprintf(fid,'%s\n',rp{:});
fclose(fid); % закрываем файл
“екст файла MyRightPart.m
function dydx = MyRightPart(x,y)
dydx=zeros(4,1);
dydx(1)=y(2);
dydx(2)=y(3);
dydx(3)=y(4);
dydx(4)=-y(1)+sin(x)-2*y(3);
‘ормируем коэффициенты и свободные члены системы линейных уравнений (11.3, 11.10). ƒл€ этого 3 раза решаем начальную задачу при значени€х неизвестных начальных параметров: { t 1, t 2}={0,0}; { t 1, t 2}={1,0}; и { t 1, t 2}={0,1}. –ешаем систему (11.10) Ц находим неизвестные начальные параметры. –ешаем начальную задачу при этих значени€х начальных параметров. –исуем график.
|
|
|
xr = linspace(x1,x2,nnp+1); % точки дл€ численного решени€
A = zeros(2,2);
b = zeros(2,1);
y0 = [y1;Dy1;0;0]; % начальные услови€ (0,0)
[xx,YY] = ode45('MyRightPart',xr,y0); % решаем —ƒ”
b = YY(nnp+1,[1 2])' - [y2;Dy2] % правые части
y0 = [y1;Dy1;1;0]; % начальные услови€ (1,0)
[xx,YY] = ode45('MyRightPart',xr,y0); % решаем —ƒ”
A(:,1) = YY(nnp+1,[1 2])'-[y2;Dy2]-b; % 1-й столбец матрицы A
y0 = [y1;Dy1;0;1]; % начальные услови€ (0,1)
[xx,YY] = ode45('MyRightPart',xr,y0); % решаем —ƒ”
A(:,2) = YY(nnp+1,[1 2])'-[y2;Dy2]-b % 2-й столбец матрицы A
yz0 = -A\b; % нашли начальные услови€
y0 = [y1;Dy1;yz0] % истинные начальные услови€
[xx,YY] = ode45('MyRightPart',xr,y0); % решаем
plot(xpl,y3,'--b',xr,YY(:,1),'-r')
title ('\bfExample 11c') % заголовок
xlabel('x')
ylabel('y(x)')
b =
-3.54609584741614
-2.69446117363805
A =
0.90929722937057 0.87079594142352
0.03850131148804 0.90929725087375
y0 =
1.00000000000000
-1.00000000000000
1.10693966258040
2.91636485466376
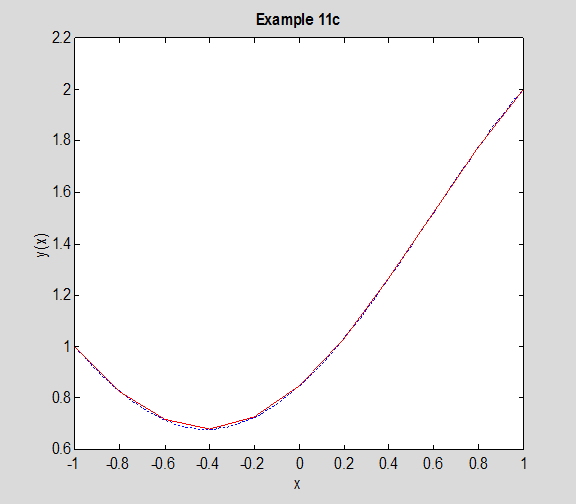
–ис. 11.4. –ешение примера 11c
ќтвет. √рафик экстремали показан на рис.11.4 сплошной красной линией. ќн практически сливаетс€ с решением примера 3, которое показано штриховой синей линией. Ќеизвестные начальные услови€: y ¢¢(x 1)=1.10694; y ¢¢¢(x 1)=2.91636.
«адание
–ешить примеры 1a, 2 и 3 методом начальных параметров. —равнить решени€ с аналитическими.

