




Структурный анализ механизма
1. Пронумеруем звенья механизма на рисунке
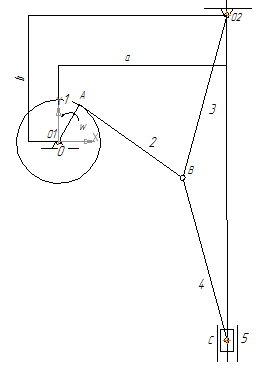
Рис.2. Схема механизма
2. Определим число подвижных звеньев. Данный механизм (рис.2) является плоским, так как его звенья двигаются в параллельных плоскостях, поэтому расчет ведется по формуле:

Где  - число подвижных звеньев,
- число подвижных звеньев,  - число низших кинематических пар,
- число низших кинематических пар,  – число высших кинематических пар.
– число высших кинематических пар.
Тогда число подвижных звеньев  . Значит, необходим один двигатель – он будет вращать первое звено с угловой частотой
. Значит, необходим один двигатель – он будет вращать первое звено с угловой частотой  .
.
3. Построим граф механизма и выделим структурные группы (рис.3.).
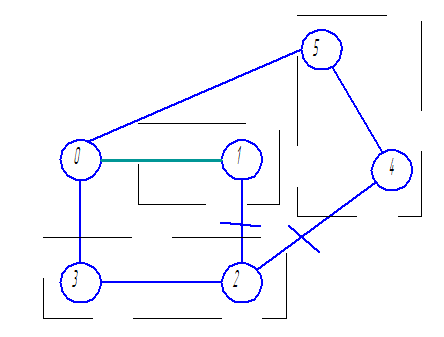
Рис.3. Граф механизма
4. В программе «КОМПАС» создадим чертеж механизма с учетом длин звеньев и расстояний между узлами (рис.4).

Рис.4. Параметризация механизма в программе «КОМПАС»
5. План 12-ти положений (рис.5.)

Рис.5. План 12-ти положений
Геометрический анализ
1. Для построения уравниния геометрического анализа сделаем разрывы в графе и выделим контура (рис.6).
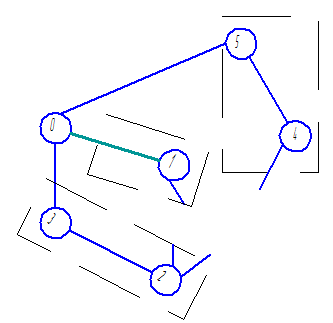
Рис.6. Разрыв графа механизма
2. Обозначим углы поворота у звеньев 2, 3 и 4 соответственно как  ,
,  и
и  (рис.7).
(рис.7).
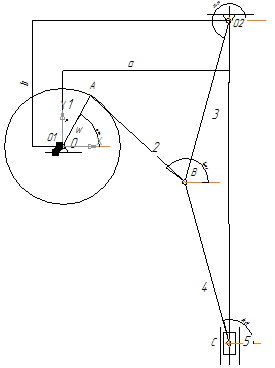
Рис.7. Схема механизма для составления уравнений геометрического анализа
3. Согласно построенному графу составим и решим две системы уравнения
Система №1


Возведем оба уравнения в квадрат

Сложим уравнения, учитывая, что 

Используя формулы приведения, получаем:

Пусть 


Синус положительный, так как угол лежит в первой четверти.
Найдем :
Так как 


Решим эту систему методом Крамера:


Внесем результаты в MathCad:


И найдем углы и 


Система №2
Решим вторую систему уравнений:


|
Запишем решение в MathCAD.


|
Найдем угол :

|
Используя найденные значения запишем также

|




(а) (б)


(в) (г)

(д)
Рис.8. Графики зависимости 
 .
.
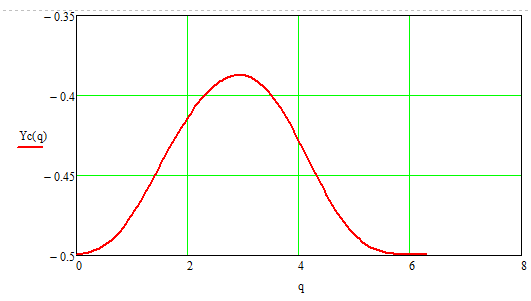
Рис.9. График зависимости 
4. Выполним проверку по входной координате.
Пусть  .
.

|
Результаты в программе «КОМПАС» совпадают с результатами в программе Mathcad.

Рис.10. Проверка механизма по выходной координате при 


Кинематический анализ
1. В случае, когда неизвестна зависимость  вместо терминов «скорость» и «ускорение» используют «аналоги скорости и ускорения»:
вместо терминов «скорость» и «ускорение» используют «аналоги скорости и ускорения»:
 ,
,
где  – аналог скорости, который равен
– аналог скорости, который равен  .
.
Аналогично для «аналога ускорения»:
 ,
,
где  – аналог ускорения, который равен
– аналог ускорения, который равен  .
.
2. Для вывода аналогов скорости продифференцируем по  системы №1 и №2.
системы №1 и №2.
Система 1:
Возмем производную по .

Решим систему методом Крамера: (f3_1=  , f2_1=
, f2_1=  )
)


|
Продифференцируем систему второй раз:

Также решим эту систему методом Крамера: (f3_2=  , f2_2=
, f2_2=  )
)

|

Система №2
Делаем аналогичные преобразования.
Возьмем производную по .




Возьмем вторую производную:



3. Строим графики зависимостей

Pис.11. Графики зависимости аналогов скоростей 


(a) (б)


(д) (е)


(ж) (з)
Рис.12. Графики зависимостей аналогов скоростей и ускорений 
Силовой анализ
1. Определим крайние точки положения механизма – крайние положения выходной координаты или точки экстремума зависимости  . Строим график зависимости производной YC’(q) (рис.13)и примерные значения , где производная равна нулю, и ищем уже точные значение.
. Строим график зависимости производной YC’(q) (рис.13)и примерные значения , где производная равна нулю, и ищем уже точные значение.

Рис.13. График зависимости YC’(q)

|

|

|

|

|

|

|
|

|

|

|

|
2. Строим положение звеньев механизма при углах  и
и  и траекторию движения точки А (рис.14). Два крайних положения механизма делят окружность траектории точки A на два сектора:
и траекторию движения точки А (рис.14). Два крайних положения механизма делят окружность траектории точки A на два сектора:
· сектор с большим углом определяет рабочий ход механизма
· сектор с меньшим углом определяет холостой ход механизма


Рис.14. Положение механизма в крайних точках. Определение рабочего и холостого хода механизма.
3. Построим график зависимости приложенной нагрузки на выходное звено. Пусть приложенная нагрузка на выходное звено на рабочем ходу  , а на холостом ходу
, а на холостом ходу  :
:
Должны выполняться условия:
·  – рабочая нагрузка всегда больше нагрузки на холостом ходу
– рабочая нагрузка всегда больше нагрузки на холостом ходу
·  , по закону сохранения механической энергии
, по закону сохранения механической энергии
· Знак приложенной нагрузки  противоположен знаку производной на данном участке.
противоположен знаку производной на данном участке.
Согласно чертежу в программе «КОМПАС», должно выполняться условие:

|
Статистический анализ
1. Решим задачу статического анализа графическим способом, т.е. определим реакции в опорах без учета масс.
Выберем на рабочем ходу  (рис.15).
(рис.15).
Рассмотрим отдельно каждое звено, начиная с выходного звена, и определим реакции, действующие на него.

Рис.15. Графики зависимости P(q) и Yc’(q).

Рис.16. Схема механизма при
2. Рассмотрим звено 5: на звено 5 действует приложенная нагрузка P, а также возникают реакции  со стороны закрепления и
со стороны закрепления и  со стороны звена 4. На основании этого можно записать:
со стороны звена 4. На основании этого можно записать:  =0
=0

|

Рис.17. Звено 5
Определим направление величины неизвестных реакций графическим способом в программе «КОМПАС»:

|

|

|

|
|
|

Рис.18. Определение реакций звена 5.



Тогда для пятого звена:
|
|
|
|
|
|
Рис.19. Звено 5.
3. Рассмотрим звено 4: на звено 4 действует реакция со стороны звена 5 –  равная по величине реакции и противоположная по направлению, и реакция со стороны звена 2 -
равная по величине реакции и противоположная по направлению, и реакция со стороны звена 2 -  ,равная по величине и противоположная по направлению.
,равная по величине и противоположная по направлению.
|
|

|

Рис.20. Звено 4

4. Рассмотрим звено 2: на звено действует реакция со стороны звена 4 - , реакция со стороны звена 1 -  и реакция со строоны звена 3 -
и реакция со строоны звена 3 -  . Линия действия параллельна AВ,
. Линия действия параллельна AВ,  , а
, а  . Тогда
. Тогда 

|
|
|

|

Рис.21. Звено 2.
Отсюда можно найти линию взаимодействия и в «Компасе» соблюдая длины отрезков найти величину реакции.
|
|
|
|
|
|
 Получаем:
Получаем:  ;
;  ,
, 
5. Рассмотрим звено 3: на звено 3 действует реакция со стороны звена 2 –  равная по величине реакции и противоположная по направлению, и реакция со стороны звена 0 -
равная по величине реакции и противоположная по направлению, и реакция со стороны звена 0 -  .
.

|

|
 Рис.22. Звено 3.
Рис.22. Звено 3.
Отсюда получаем: = = 8,7 Н.
6. Рассмотрим звено 1: на него действует реакция со стороны звена 2 -  , равная по величине и противоположная по направлению и реакция со стороны закрепления -
, равная по величине и противоположная по направлению и реакция со стороны закрепления -  , равная по величине и противоположная по направлению, а также движущий момент Q.
, равная по величине и противоположная по направлению, а также движущий момент Q.


|

|

|
Рис.23. Звено 1.
 , где h – расстояние между векторами и , которое определяем в «КОМПАСЕ»: h=85,95 мм.
, где h – расстояние между векторами и , которое определяем в «КОМПАСЕ»: h=85,95 мм.

|

|

Рис.25. Определение реакций звена 1.
Тогда движущий момент 
Кинетостатический анализ
Кинетостатический анализ с учетом масс проведем двумя методами:
1) Погруппным методом (определим движущий момент и реакции в опорах R)
2) Методом возмодных перепещений (определим движущий момент Q)
Для кинетостатического анализа с учетом масс учитывают силы инерции, силы тяжести и моменты сил инерции. Силы инерции представляют как  , где m (кг)- масса звена, а w – ускорение звена, равное
, где m (кг)- масса звена, а w – ускорение звена, равное  , k (м) – координата цетра-масс,
, k (м) – координата цетра-масс,  (рад/с) – скорость вращения. Моменты сил инерции представляют как
(рад/с) – скорость вращения. Моменты сил инерции представляют как  (Н*м), где
(Н*м), где  - угловое ускорение, равное
- угловое ускорение, равное  ,
,  - угол поаорота звена (рад);
- угол поаорота звена (рад);  - осевой момент инерции, равный
- осевой момент инерции, равный  , где
, где  - длина звена (м). Силы тяжести представляют как
- длина звена (м). Силы тяжести представляют как  , где
, где  - ускорение свободного падения.
- ускорение свободного падения.
Массу ползунов принимаем 30 кг, а стержней  , где
, где  - погонная масса, а
- погонная масса, а  - длина стержня (м).
- длина стержня (м).
Погруппный метод
На схеме механизма (рис.26.) изобразим все силы инерции, силы тяжести и момент силы инерции для всех звеньев механизма.

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
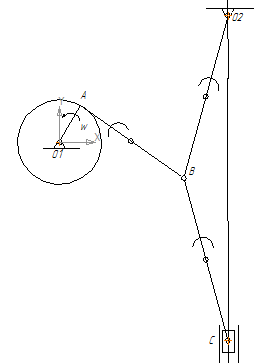
Рис.26. Схема механизма с силами инерции и моментами сил инерций.
Силы инерции и силы тяжести приложенны в точках центр-масс звеньев. Для ползунов центр-масс расположен в середине ползуна, а для стержней – на середине длины стержня.
Определим законы движения центров-масс обоих звеньев:

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|



Запишем выражения сил инерции, сил тяжести и моментов сил инерции:

|

|

|

|

|

|

|

|

|

|

|

|
Учитывая, что  и
и  , моменты сил инерции можно записать как:
, моменты сил инерции можно записать как:

|


Рассмотрим отдельно структурные группы механизма. Отрываем структурную группу механизма и в местах отрыва действие других звеньев заменяем реакциями опор.
Структурная группа 4-5:
|
|
|
|

|

|
|
|

|

|

|

|
|
|
|
|
|
|
 Рис.27. Структурная группа 4-5.
Рис.27. Структурная группа 4-5.
Запишем уравнения равновесия для плоской системы (момент берем относительно точки B).
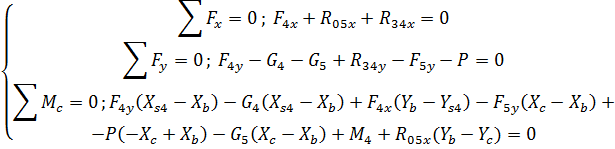
Решаем систему уравнений равновесия и находим неизвестные реакции опор  ,
,  ,
,  .
.

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
|
|
|
|

Рис.28. Структурная группа 3-2.
Запишем уравнение равновесия для плоской системы (данная структурная группа представляет собой группу VV, уравнение равновеся для моментов которой записываются для точки В относительно двух точек, сначала относительно A, а потом оттносительно точки  ):
):
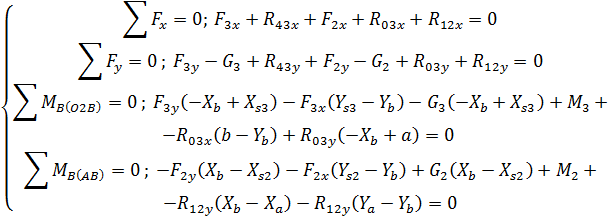
В данной системе реакции и равны и противоположно направленны реакциям  и
и  соответственно:
соответственно:

|

|
Приведем систему к виду для решения методом Крамера и выразим неизвестные реакции опор  , составив матрицы коэффициентов системы:
, составив матрицы коэффициентов системы:




Структурная группа 1-0.
|
|
|
|

|

|

|
|
|

|

|

|

|
Рис.29. Структурная группа 1-0.
Запишем уравнения равновесия для плоской системы (момент берем относительно точки  ).
).

В данной системе реакции  и
и  равны и противоположно направленны реакциям
равны и противоположно направленны реакциям  и
и  соответственно:
соответственно:

|

|
Решаем систему и находим неизвестные реакци опор  и
и  , а также движущий момент Q:
, а также движущий момент Q:

|

|

|
В программе MathCAD строим график зависимости Q(q) (Н*м) и получаем закон распределения движущего момента в зависимости от q.

Рис.30. Зависимость движущего момента Q(q), полученного погруппным методом.
Метод возможных перемещений
Метод возможных перемещений используется как проверка погруппного метода.
Метод заключается в том, что малая работа всех активных сил на возможном перемещении равна нулю.
 , где
, где  равна сумме произведений всех активных сил звеньев на их возможные перемещения.
равна сумме произведений всех активных сил звеньев на их возможные перемещения.
Для механизма работа активных сил равна:

|
В программе MathCAD строим график зависимости Q1(q)(Н*м) (рис.31) и получаем закон распределения движущегося момента в зависимости от q.

Рис.31. Зависимость движущего момента Q1(q), полученного методом возможных перемещений.
Для проверки кинетостатического анализа наложим графики зависимости движущегося момента Q(q), и полученного в методе возможных перемещений и погруппным методом (рис.32).
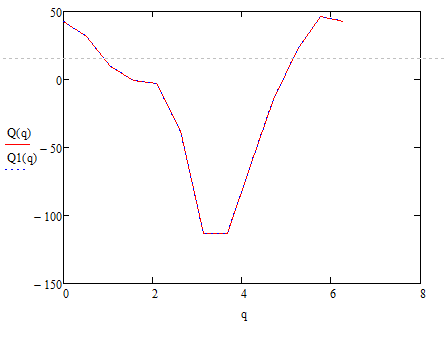
Рис.32. Проверка кинестетического анализа.
Как видно из рис.32 графики зависимости движущегося момента для двух методов кинетостатического анализа совпали, поэтому можно говорить о правильности анализа механизма насоса.
Вывод
В данной работе был проведен анализ механизма пресса различными методами. Мы проанализировали работу механизма без учета масс – геометрический, кинематический и графический анализы, и с учетом действующих на пресс сил в погруппном анализе и методом возможных перемещений. В последних случаях мы получили зависимости движущего момента Q в зависимости от частоты оборота двигателя. Для разных методов эти результаты совпали.

