




Лабораторна робота № 1
ВИЗНАЧЕННЯ ГОРИЗОНТАЛЬНОЇ СКЛАДОВОЇ ВЕКТОРА МАГНІТНОЇ ІНДУКЦІЇ МАГНІТНОГО ПОЛЯ ЗЕМЛІ
Мета роботи: вивчити один з методів визначення горизонтальної складової вектора магнітної індукції магнітного поля Землі.
Прилади та обладнання: тангенс-бусоль, джерело постійної напруги на 4¸6 В, амперметр постійного струму на 0,5¸1А, котушка, реостат на 100¸200 Ом, з’єднувальні дроти, двополюсний перемикач.
Методика виконання роботи
Земний магнетизм (геомагнетизм) – магнітне поле Землі та навколоземного космічного простору – зумовлений дією постійних джерел, що містяться всередині Землі і зазнають лише повільних вікових змін, та зовнішніх джерел (змінних), які знаходяться у магніто- й іоносфері. Відповідно розрізняють основне (головне, 99%) і змінне (1%) геомагнітні поля. Складну картину розподілу геомагнітного поля в першому наближенні можна зобразити полем диполя, розташованого в центрі Землі, або однорідною намагніченою кулею, магнітний момент якої спрямований під кутом 11,5° до осі обертання Землі. Геомагнітні полюси Землі не збігаються з географічними. Південний полюс SM магнітного поля Землі знаходиться біля північних берегів Америки, близько 75° північної широти і 101° західної довготи, а північний полюс NM – в Антарктиді, близько 67° південної широти і 140° східної довготи.
Для з’ясування походження основного магнітного поля розглядалися різні гіпотези. Сучасні дані про вікові та багаторазові зміни полярності геомагнітного поля задовільно пояснюються тільки моделлю гідромагнітного динамо. Згідно з цією гіпотезою в електропровідному рідкому ядрі Землі проходять дуже складні й інтенсивні рухи, що спричинюють самозбудження магнітного поля, аналогічно тому, як виникає генерація струму й магнітного поля в динамо-машині з самозбудженням. Дія гідромагнітного динамо заснована на явищі електромагнітної індукції в рухомому середовищі, яке під час руху перетинає силові лінії магнітного поля. Дослідження гідромагнітного динамо спираються на магнітну гідродинаміку.
У загальному випадку магнітне поле в ядрі Землі можна уявити у вигляді суми двох складових – тороїдального поля  і поля
і поля  , силові лінії якого лежать в меридіанних площинах.
, силові лінії якого лежать в меридіанних площинах.
Схему магнітних полів у гідромагнітному динамо Землі зображено на рис.1, де – поле, близьке до поля диполя, напрямленого вздовж осі обертання Землі; – тороїдальне поле, яке замикається всередині земного ядра. Поле в сотні разів сильніше за проникаюче з ядра назовні поле .
 |
Рис. 1
У будь-якій точці простору навколо Землі і на поверхні Землі діють магнітні сили. Магнітне поле Землі вивчають за допомогою магнітних вимірювань (магнітна зйомка). Такі вимірювання виконують на суші, в морях та океанах (за допомогою немагнітних суден), у повітрі (аеромагнітні зйомки) і на великих висотах (за допомогою ракет і штучних супутників Землі).
У будь-якому місці земної поверхні вектор магнітної індукції магнітного поля Землі має певне значення та напрямок. Так, біля екватора він спрямований горизонтально, а біля магнітних полюсів – вертикально, в інших точках земної поверхні – під деяким кутом до неї.
Значення величини індукції магнітного поля Землі змінюються від 4,2.10-5 Тл на екваторі до 7,0.10-5 Тл поблизу магнітних полюсів.
Рис.2
Основними параметрами магнітного поля Землі є магнітне нахилення q (кут між напрямом вектора  і площиною горизонту, див. рис.2), магнітне схилення j (кут між горизонтальною складовою вектора та площиною гео
і площиною горизонту, див. рис.2), магнітне схилення j (кут між горизонтальною складовою вектора та площиною гео
 |
графічного меридіана) і горизонтальна складова індукції магнітного поля Землі
 .
.
Географічний меридіан – напрямок, що визначає дійсне положення лінії “північ-південь” у певній місцевості.
Магнітний меридіан – уявна лінія на земній поверхні, що збігається з напрямком земного магнітного поля (напрямок стрілки компаса збігається з напрямком магнітного меридіана).
На магнітних полюсах магнітне нахилення q = ±90°. Тому повна індукція та вертикальна складова магнітного поля мають однакові значення: магнітна стрілка встановлюється у вертикальному положенні.
На магнітному екваторі (q = 0°) повна індукція та горизонтальна складова дорівнюють одна одній: магнітна стрілка встановлюється у горизонтальному положенні.
 Напрям вектора досліджують за допомогою магнітної стрілки, яка закріплена на вертикальній осі і може вільно обертатись тільки в горизонтальній площині. Якщо таку магнітну стрілку розмістити у центрі колової рамки зі струмом, розміщеної вертикально в площині магнітного меридіану, то магнітна стрілка встановиться вздовж напрямку вектора магнітної індукції сумарного магнітного поля: магнітного поля Землі (йдеться про горизонтальну складову , оскільки вертикальна складова зрівноважена реакцією опори стрілки) та магнітного поля колової рамки зі струмом індукцією
Напрям вектора досліджують за допомогою магнітної стрілки, яка закріплена на вертикальній осі і може вільно обертатись тільки в горизонтальній площині. Якщо таку магнітну стрілку розмістити у центрі колової рамки зі струмом, розміщеної вертикально в площині магнітного меридіану, то магнітна стрілка встановиться вздовж напрямку вектора магнітної індукції сумарного магнітного поля: магнітного поля Землі (йдеться про горизонтальну складову , оскільки вертикальна складова зрівноважена реакцією опори стрілки) та магнітного поля колової рамки зі струмом індукцією  .
.
Таким чином, остаточно магнітна стрілка встановиться під певним кутом a до напрямку магнітного поля Землі та займе таке положення рівноваги, при якому рівнодіюча цих двох полів буде збігатися з лінією, яка з’єднує полюси стрілки. На рис.3 NS є напрям магнітного меридіана Землі; AB – переріз колової рамки горизонтальною площиною;  – вектор горизонтальної складової магнітної індукції магнітного поля Землі;
– вектор горизонтальної складової магнітної індукції магнітного поля Землі;  – вектор магнітної індукції магнітного поля, утвореного струмом І в коловій рамці (його напрямок визначається за правилом свердлика).
– вектор магнітної індукції магнітного поля, утвореного струмом І в коловій рамці (його напрямок визначається за правилом свердлика).
Кут, під яким встановлюється магнітна стрілка при проходженні струму у коловій рамці,  .
.
Отже,  . (1)
. (1)
Індукція магнітного поля в центрі одного витка обчислюється за законом Біо-Савара-Лапласа:
 , (2)
, (2)
де m - відносна діелектрична проникність середовища (для повітря m» 1, в той час як для вакууму m=1); m0 – магнітна стала, m0= 4p.10-7 Гн/м; І – струм у витку; R – радіус витка.
Магнітна індукція в центрі колової рамки зі струмом, що має n витків, дорівнює
 . (3)
. (3)
У даній роботі R = 0,075 м, n = 160 витків.
Підставивши вираз (3) в рівняння (1), отримуємо робочу формулу для обчислення величини горизонтальної складової вектора магнітної індукції магнітного поля Землі:
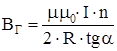 (4)
(4)
Порядок виконання роботи
1. Скласти електричне коло згідно зі схемою, приведеною на рис.4, де E – джерело постійного струму; П – двополюсний перемикач; Б –бусоль; R – реостат; К – колова рамка; А – амперметр постійного струму.
Бусоль БШ-1 складається з магнітної стрілки, закріпленої на проградуйованому лімбі, і оптичної системи, за допомогою якої проводять відлік. Щоб уникнути впливу повітряних течій, магнітна стрілка з лімбом розміщені в металевій коробці, закритій зверху склом. На одному боці коробки розміщена рамка з візирною ниткою, а на протилежному – збираюча лінза в оправі з призмою повного внутрішнього відбивання. Під візирною ниткою розташований аретир. Стрілка, звільнена від аретиру, може вільно обертатися тільки в горизонтальній площині. Спостерігаючи крізь лінзу, одночасно можна бачити поділки шкали (у градусах), нанесені на лімб, і нитку візира під ними.
 |
Після складання електричного кола необхідно звільнити стрілку від аретира і встановити бусоль у площині магнітного меридіана, повертаючи її. При цьому візирна нитка повинна знаходитись проти поділки 90 або 270°, що відповідає напряму схід-захід. При повертанні бусолі треба слідкувати за тим, щоб магнітна стрілка весь час знаходилась у площині витків колового струму, тобто щоб площина витка збігалася з напрямом південь-північ.
2. Відмітити положення візирної нитки за шкалою бусолі (90 або 270°), тобто початок відліку – кут j0.
3. Замкнути коло. За допомогою реостата встановити силу струму І. Зробити відлік відповідного кута повороту j1 магнітної стрілки.
4. Перемикачем П змінити напрямок струму І та провести знову відлік відповідного кута j2 магнітної стрілки. Відлік для двох протилежних напрямків струмів дозволяє уникнути впливу систематичної помилки, пов’язаної з неточністю встановлення колової рамки в площині магнітного меридіану. Знаходимо значення a = çj1 - j2÷/2 (де j1 – кут відхилення праворуч, а j2 – кут відхилення ліворуч).
5. Провести аналогічні вимірювання при тому самому струмові І п’ять разів. Середнє значення з цих п’яти вимірювань  використати для обчислення величини BГ за робочою формулою (4). Всі дані та результати вимірювань занести до таблиці 1.:
використати для обчислення величини BГ за робочою формулою (4). Всі дані та результати вимірювань занести до таблиці 1.:
Таблиця 1
I= …А; j0= …; n= 160; R= 0,075 м
| №№ п/п | j1 град. | j2, град. | a, град. | Da, град. | (Da)2, град2. | tga | BГ, Тл |
< a>= tg< a>= < BГ >=
6. Розрахувати похибки вимірювань і записати результат вимірювання величини горизонтальної складової вектора магнітної індукції магнітного поля Землі.
Кінцевий результат надати у вигляді: Вг = < Bг > ± DВг
Лабораторна робота № 2
ВИВЧЕННЯ МЕХАНІЧНОГО ОСЦИЛЯТОРА З ОДНИМ СТУПЕНЕМ ВІЛЬНОСТІ
Мета роботи – ознайомитися з характером коливань; розрахувати основні характеристики механічного осцилятора, що зумовлюють процес коливань.
Прилади та обладнання: штатив зі шкалою, пружиною і тягарцем масою m; секундомір; освітлювач.
Теоретичні відомості
У механіці найпростішим осцилятором з одним ступенем вільності є пружинний маятник – тіло масою m, що підвішене на невагомій абсолютно пружній пружині довжиною l.
На рис.1 показано тягарець m, підвішений до пружини l, який перебуває у спокої. В цьому положенні на нього діють сили тяжіння ( ) та пружності (
) та пружності ( ). При цьому відповідно до закону Гука, маємо:
). При цьому відповідно до закону Гука, маємо:



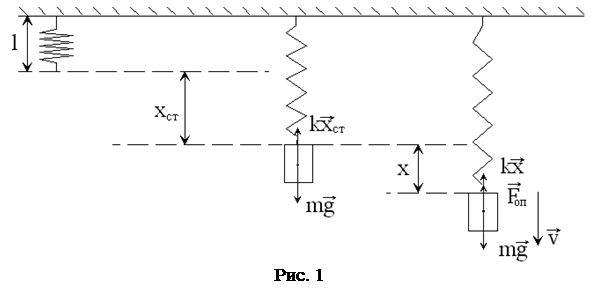
де xст – статична деформація пружини.
Охарактеризуємо зміщення тіла від стану рівноваги координатою x, причому вісь x спрямуємо вздовж вертикалі вниз, а нуль осі з’єднаємо з положенням рівноваги тіла.
Якщо вивести тіло з положення рівноваги, подовживши пружину на величину x вниз (рис.1) зовнішньою силою, то в пружині виникне додаткова сила пружності  , де
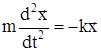
, де  – вектор зміщення тіла. Якщо після цього припинити дію зовнішньої сили, то в системі пружина–тіло виникне коливний рух. За другим законом Ньютона, маємо:
– вектор зміщення тіла. Якщо після цього припинити дію зовнішньої сили, то в системі пружина–тіло виникне коливний рух. За другим законом Ньютона, маємо:
 . (1).
. (1).
Так як прискорення  .
.
Тоді
 .
.
Приймемо позначення  і отримуємо диференційне рівняння незгасаючих коливань пружинного маятника
і отримуємо диференційне рівняння незгасаючих коливань пружинного маятника
 (2)
(2)
з розв’язком
 , (3)
, (3)
де x – зміщення тягарця m від положення рівноваги, x0 – амплітуда коливань, j0 – початкова фаза.
В реальних умовах при коливаннях необхідно приймати до уваги опір середовища. Для малих швидкостей руху  сила опору середовища
сила опору середовища  , де r – коефіцієнт опору.
, де r – коефіцієнт опору.
Тоді рівняння руху набуває вигляду:
 ,
,
або
 .
.
Введемо позначення  і дістанемо диференційне рівняння згасаючих коливань пружинного маятника: (4)
і дістанемо диференційне рівняння згасаючих коливань пружинного маятника: (4)
з розв’язком
 , (5)
, (5)
 – амплітуда згасаючих коливань у момент часу t, e – основа натуральних логарифмів, d – коефіцієнт згасання. Графік цих коливань показаний на рис. 2.
– амплітуда згасаючих коливань у момент часу t, e – основа натуральних логарифмів, d – коефіцієнт згасання. Графік цих коливань показаний на рис. 2.
Маса тягарця m, коефіцієнт опору r і жорсткість пружини k називаються параметрами осцилятора (коливальної системи), що розглядається, а величини x0 і j0 є константи, які визначаються початковими умовами.
Циклічна частота власних коливань маятника (при d=0 –  незгасаючі коливання)
незгасаючі коливання)  ,
,
звідки період власних коливань  .
.
Циклічна частота згасаючих коливань пружинного маятника
 .
.
Внаслідок згасання такі коливання не є суворо періодичними. Тому під їх періодом розуміють інтервал часу між двома послідовними максимальними відхиленнями від положення рівноваги в один бік.
Період згасаючих коливань
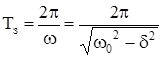 .
.
Логарифмічний декремент згасання q характеризує згасання (зменшення амплітуди) за один період і визначається як натуральний логарифм відношення двох амплітуд, які рознесені в часі через період TЗ
 .
.
Для N коливань  .
.
Часом релаксації t називається проміжок часу, за який амплітуда коливань зменшується в e разів. Оскільки  , то dt=1, або
, то dt=1, або  , тобто час релаксації t є обернено пропорційний коефіцієнту згасання коливань.
, тобто час релаксації t є обернено пропорційний коефіцієнту згасання коливань.
Якщо ввести Ne – число коливань, за яке амплітуда осцилятора зменшується в e разів, то t=TЗNe і логарифмічний декремент згасання
 .
.
Для характеристики коливних систем вводиться поняття добротності системи Q:  .
.
При малих згасаннях (d << w0) період згасаючих коливань TЗ дорівнює періоду власних коливань, тобто T0, тому
 .
.
Таким чином, чим більша добротність системи, тим повільніше затухають коливання.
Порядок виконання роботи
1. Визначити період коливань TЗ . Для цього за допомогою секундоміра виміряти час t, за який тягарець здійснить N1=20 повних коливань. Визначити період за формулою  . Вимірювання повторити не менше п’яти разів і занести до табл. 1. Обчислити похибки. Результати обчислень надати у такому вигляді:
. Вимірювання повторити не менше п’яти разів і занести до табл. 1. Обчислити похибки. Результати обчислень надати у такому вигляді:
 .
.
Таблиця 1
| №№ | t, c | Dt, c | (Dt)2, c2 | TЗ, с |
| Середнє знач. |
2. Визначити логарифмічний декремент згасання q.
Відхилити тягарець від положення рівноваги на 2-3 см, відпустити його, одночасно включивши секундомір, визначити час t, за який амплітуда коливань маятника зменшиться у 2 рази (A1/AN=2). Вимірювання повторити три рази і результати занести до табл. 2.
Таблиця 2
| №№ | А1, мм | АN, мм | tN, c | Dt, c | (Dt)2, c2 | q |
| Середзнач. |
Оскільки безпосередньо визначити положення тягарця відносно шкали важко, то вимірювання краще робити, спостерігаючи рух тіні тягарця вздовж шкали, для чого попередньо треба освітити установку настільною лампою.
Розрахувати логарифмічний декремент згасання:
 та похибки вимірювання. Результати надати у такому вигляді:
та похибки вимірювання. Результати надати у такому вигляді:
 .
.
3. Визначити:
а) циклічну частоту згасаючих коливань пружного маятника
 ;
;
б) коефіцієнт згасання коливань  ;
;
в) циклічну частоту власних коливань маятника  ;
;
г) час релаксації .
Лабораторна робота № 3

