





лассификаци€ механических «”. ћеханические «” условно можно классифицировать по типам приводов, передаточного механизма и губок.
ѕо типу привода «” подраздел€ютс€ на конструкции с пневмо-, гидро-, электроприводом и с пружинами, энерги€ которых преобразуетс€ в движение губок «”. ѕо типу передаточного механизма «” подраздел€ютс€ на стержневые, реечные, клиновые или кулачковые, а по типу губок - с жесткими губками, с регулируемыми, с пружинными.
ѕневмопривод удобен простым подводом энергии к «” (один шланг), при этом легко регулируетс€ усилие зажима, привод имеет возможность работать в агрессивных средах и в зонах высоких температур.
—ущественный недостаток пневмопривода - большие габаритные размеры при сравнительно небольшом усилии захвата.
√идравлический привод обеспечивает большие усили€ захвата; он компактен и легко регулируетс€, что предопредел€ет широкое его распространение.
Ёлектрический привод требует специальных малогабаритных двигателей посто€нного тока, разработка которых дл€ робототехники пока только ведетс€.
инематические схемы стержневых механизмов «”. инематические схемы различных стержневых механизмов «” приведены на рис. 1. ѕричем варианты схем а, б и в реализуют большие усили€ захвата, нежели варианты схем г, д, е.
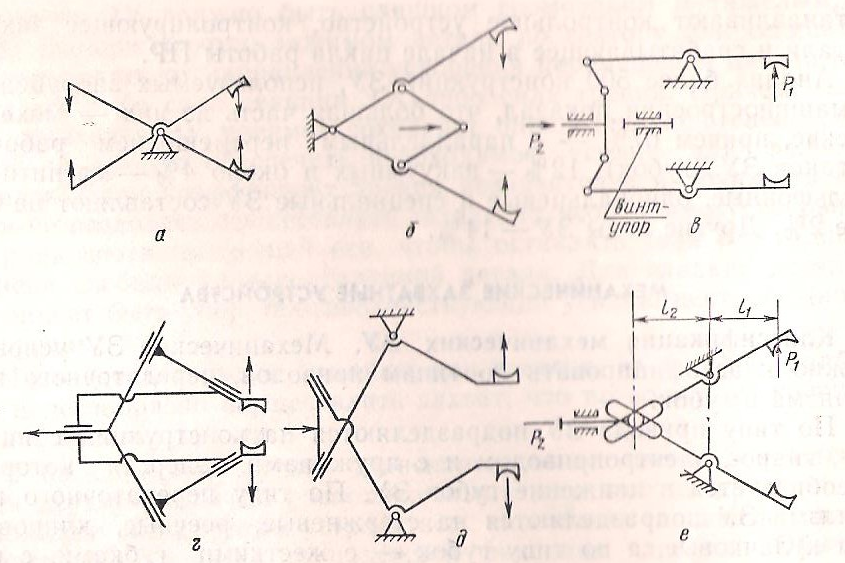
–ис. 1. инематические схемы рычажно-стержневых передаточных механизмов
улисно-стержневые механизмы «”. инематические схемы таких «” и формулы их передаточных отношений показаны на рис.2. Ќаиболее интересна схема показанна€ на рис.2, так как она дает большой выигрыш в силе зажима детали. ќднако сила зажима такого «” - малоизмен€юща€с€ величина, обусловленна€ самой схемой.
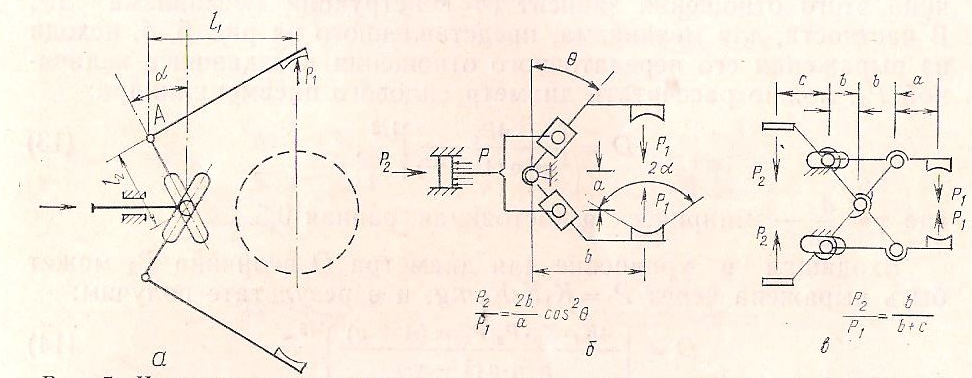
–ис. 2. инематические схемы кулисно-стержневых механизмов и формулы их передаточных отношений
—ила зажима на «” измен€етс€ мало при небольшом изменении и становитс€ несколько большей при увеличении /2.
Ѕольшее силовое передаточное отношение может быть получено, когда шарниры рычагов вынесены вперед (см. рис. 2, а).
¬ этом случае передаточное отношение дл€ кулисно-стержневой кинематической схемы «” равно:

где l1 - рассто€ние между осью шарнира и линией действи€ силы;
l2 - рассто€ние между пальцем штока цилиндра и шарнира≠ми «”;
α - угол между направлением силы –2 и осью кулисы, когда «” находитс€ в закрытом положении;
η - ѕƒ ≈ (0,94-0,95) [1].
Ќа рис. 2, б и в приведены схемы других кулисно-стержневых механизмов и формулы их передаточных отношений.
¬ качестве двигател€ в захватном устройстве может исполь≠зоватьс€ электродвигатель с системой сервоуправлени€ либо пнев≠матический или гидравлический цилиндр. Ќа рис. 2, б показано типичное «”, которое приводитс€ в действие пневмоцилиндром.
«” перемещаетс€ либо в горизонтальной, либо в вертикальной плоскости, причем максимальное значение допустимого ускорени€ «” составл€ет 20 м/с2.
—хемы «” с зубчатыми передачами. инематиче≠ские схемы с зубчато-реечными передачами обусловливают мень≠шие габаритные размеры «”, допускают большее раскрытие губок, но при этом не дают выигрыша в силе зажима заготовки по срав≠нению со стержневыми механизмами. Ќа рис. 3, аЧг показаны кинематические схемы «” с плоско-параллельным движением гу≠бок. ƒвижение, обеспечивающее зажим детали, передаетс€ от двигател€ через редуктор на рейку, котора€ зацепл€етс€ с зубча≠тыми секторами с зубцами, нарезанными на планках, замыкаю≠щих шарнирные четырехзвенники, к которым креп€тс€ губки «”. “ака€ конструкци€ отличаетс€ компактностью и большим ходом губок.
|
|
|

–ис. 3. инематические схемы «” с плоско-па≠раллельным движением губок
«”, схема которого представлена на рис. 4, б, имеет особен≠ность конструкции, позвол€ющую ему центрировать деталь от≠носительно губок: клин имеет возможность помимо вертикального перемещени€ двигатьс€ горизонтально, что хорошо видно на раз≠резе ј Ч ј. ¬ момент, когда права€ губка коснетс€ детали, клин начнет перемещатьс€ влево и будет двигатьс€ до тех пор, пока губки не сомкнутс€ на детали, после чего груз зажметс€ обеими губками. √рузоподъемность «”Ч100 кг, масса Ч 18,5 кг. Ќа рис. 4, в, г показаны две другие схемы передаточных механизмов с использованием клиньев

–ис. 4. инематические схемы «” с использованием клиновой пары

