




афедра 305
«Автоматизированные комплексы
систем ориентации и навигации»
Лабораторная работа на тему:
"Инерциальная курсовертикаль"
Выполнила студентка группы № 03-502
Макаренкова Надежда
Проверил преподаватель:
Корягин Лев Иванович
Москва 2012 год
1 ВВЕДЕНИЕ
В описании приняты следующие условные сокращения и обозначения:
А - датчик акселерометра;
Г - гироскоп;
ГБ - гироблок;
Д - диод;
Дм - датчик момента;
Ду - датчик угла прецессии гироскопа;
СКТ - синусно-косинусный трансформатор;
ДФСКТ - дифференциальный синусно-косинусный трансформатор;
ПК - преобразователь координат;
Р - реле;
ТГ - тахогенератор;
УА - усилитель акселерометра;
ФВР - фильтр внешней рамы;
УС’’ - усилитель системы гиростабилизации;
УДМ - усилитель датчика момента;
УК - усилитель коррекции;
УИ - усилитель интегратора;
РВ - реле времени;
БК - блок контроля;
ПВП - переключатель вращения подшипников;
УВР - усилитель внешней рамы;
ФС - фильтр стабилизации;
ГН - генератор напряжения;
УНЧ - усилитель низкой частоты;
БИ - блок интегрирующий;
ГУВК - гироскопическое устройство выставки курса;
ГПК - гирополукомпас;
АК - астрокоррекция;
ЗК - задатчик курса;
ВК - выключатель коррекции;
Ro - радиус Земли;
g - ускорение силы тяжести (9,81 м/с2);
W - угловая скорость вращения Земли (15 град/час);
U - абсолютная угловая скорость;
V - абсолютная линейная скорость;
w - дрейф гироплатформы;
a - абсолютное ускорение;
j - географическая широта;
yг - гироскопический курс;
yгмк - гиромагнитный курс;
yорт - ортодромический курс;
g - угол крена;
u - угол тангажа.
Цифра 1 присвоена гироблоку (гироскопу), стабилизирующему платформу с акселерометрами вокруг оси тангажа (при курсе yг = 0). Цифра 2 присвоена гироблоку (гироскопу), стабилизирующему платформу с акселерометрами вокруг оси крена (при курсе yг = 0). Цифра 3 присвоена гироблоку (гироскопу), стабилизирующему платформу с акселерометрами вокруг вертикальной оси.
2. НАЗНАЧЕНИЕ
ИКВ устанавливаемая на самолетах и вертолетах, предназначена для определения и выдачи потребителям:
- курса, углов крена и тангажа;
- составляющих абсолютной линейной скорости самолета по двум горизонтальным осям гиростабилизированной платформы;
- вертикального ускорения самолета.
ПРИМЕЧАНИЕ:
1. Составляющие абсолютной линейной скорости самолета по двум горизонтальным осям гироплатформы выдаются в сумме с постоянными составляющими дрейфа гироплатформы.
2. Вертикальное ускорение самолета выдается в сумме с ускорением силы тяжести.
3. СОСТАВ
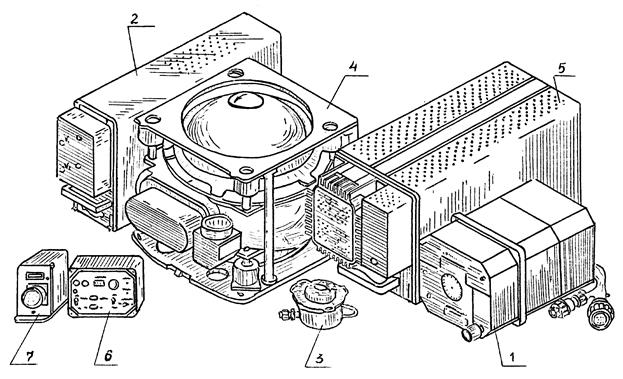
Рис. 1. Состав ИКВ.
Система ИКВ (рис. 1) состоит из:
а) системы ГИКВ, в которую входят:
- курсовертикаль КВ-1,
- блок усилителей гиродатчика БУГ-14,
- блок коррекции БК-20,
- пульт управления ПНД-1 (пульт начальных данных);
б) магнитного корректора (МК), в который входят:
- коррекционный механизм КМ-2 серия 1,
- индукционный датчик ИД-6 серия 1.
ПРИНЦИП РАБОТЫ
Работа системы ГИКВ основана на определении углов крена, тангажа, курса, составляющих абсолютной линейной скорости самолета гироинерциальным методом. Магнитный корректор ИК обеспечивает начальную выставку гироплатформы системы ГИКВ по магнитному или географическому меридиану при наземной подготовке системы и формирование гиромагнитного курса в полете.
Принцип работы системы ГИКВ
Принцип работы ГИКВ заключается в измерении углов маневра самолета относительно гиростабилизированной платформы, удерживаемой в плоскости горизонта по сигналам интегральной коррекции, сформированным путем интегрирования горизонтальных составляющих абсолютного ускорения самолета, измеренных акселерометрами, расположенными на гироплатформе, а в азимуте - по направлению, задаваемому свободным или корректируемым гироскопом.
Гироплатформа представляет собой трехосный гиростабилизатор, выполненный на трех двухстепенных гироскопах. Оси чувствительности гироскопов образуют правый координатный трехгранник Оxhz, ось Оz О которого ориентируется по линии отвеса, оси Оx и Оh находятся в плоскости, перпендикулярной линии отвеса, а точка “О” считается совпадающей с центром тяжести самолета (рис. 2). Для осуществления ориентации оси по направлению линии отвеса при произвольном перемещении точки “О” трехгранник Оxhz необходимо поворачивать в инерциальном пространстве вокруг осей Оx и Оh посредством приложения моментов к осям чувствительности гироскопов 1Г, 2Г. Третий гироскоп 3Г, осуществляющий ориентацию оси Оz гироплатформы в азимуте может быть либо свободным, либо корректируемый. В последнем случае к оси чувствительности гироскопа ЗГ необходимо прикладывать корректирующий момент, равный Wz*sinj.

Рис. 2. Координатный трёхгранник Оξηζ на Земной сфере.
Для обеспечения невыбиваемости при выполнении самолетом сложных пространственных маневров гиростабилизатор помещен в дополнительную (называемую в дальнейшем внешней) раму крена. Благодаря наличию внешней рамы крена исключается возможность совмещения осей трехосного гиростабилизатора и, как следствие, его выбиваемость (например, при положении самолета с углом тангажа, близким к 90град., и “падении” на крыло). С целью устранения кинематических погрешностей углов крена, курса, тангажа, выдаваемых гиростабилизатором, внешняя рама крена отслеживается так, чтобы сохранилась перпендикулярность между рамой тангажа и внутренней рамой крена.
На гироплатформе установлены три датчика 1А, 2А, 3А акселерометров (рис. 3).
Составляющие абсолютной линейной скорости  и
и  , и составляющие угловой скорости
, и составляющие угловой скорости  и
и  связаны следующими соотношениями:
связаны следующими соотношениями:
 ,
,  (2)
(2)
С учетом (2) проекции абсолютной угловой скорости вращения гироплатформы на оси Оx и Оh примут следующей вид:
 ,
,  (3)
(3)
где  и
и  - проекции горизонтальной составляющей угловой скорости вращения Земли в точке вылета.
- проекции горизонтальной составляющей угловой скорости вращения Земли в точке вылета.

Рис. 3.
Следовательно, чтобы ось Оz гироплатформы следила за линией отвеса, необходимо, чтобы моменты, налагаемые на соответствующие гироскопы, были пропорциональны интегралам от измеренных горизонтальных составляющих  и
и  абсолютного ускорения самолета. Такая коррекция называется интегральной. Гироплатформа при этом оказывается невозмущаемой. При идеальной работе системы ГИКВ она будет оставаться в горизонтальной плоскости.
абсолютного ускорения самолета. Такая коррекция называется интегральной. Гироплатформа при этом оказывается невозмущаемой. При идеальной работе системы ГИКВ она будет оставаться в горизонтальной плоскости.
Для получения ортодромического курса необходимо ось Оx гироплатформы удерживать по заданному направлению относительно Земли, для чего на гироскоп 3Г необходимо прикладывать корректирующий момент, обеспечивающий прецессию гироплатформы с угловой скоростью, пропорциональной
 (4)
(4)
где  - вертикальная составляющая угловой скорости вращения Земли;
- вертикальная составляющая угловой скорости вращения Земли;
 - дрейф гироплатформы по оси Оz.
- дрейф гироплатформы по оси Оz.
В случае отсутствия коррекции третьего гироскопа система ГИКВ выдает так называемый гироскопический курс yг.
Для обеспечения работы системы ГИКВ в полете необходимо во время предполетной подготовки на неподвижном основании гироплатформу с акселерометрами выставить в плоскости горизонта и в азимуте. По сигналам с датчиков 1А, 2А акселерометров производится выставка гироплатформы в плоскость горизонта, а интеграторы ускорений 1БИ и 2БИ (рис. 3) используется для запоминания дрейфа  и
и  гироплатформы по осям Оh и Оx соответственно и проекций горизонтальной составляющей угловой скорости вращения Земли.
гироплатформы по осям Оh и Оx соответственно и проекций горизонтальной составляющей угловой скорости вращения Земли.
Акселерометр, состоящий из датчика 3А и усилителя 3УА, измеряет вертикальную составляющую абсолютного ускорения  и выдает потребителям вертикальное ускорение самолета в сумме с ускорением силы тяжести.
и выдает потребителям вертикальное ускорение самолета в сумме с ускорением силы тяжести.
Вследствие инструментальных погрешностей гироскопов, акселерометров, интеграторов гироплатформа в режиме интегральной коррекции будет иметь колебания относительно плоскости горизонта, и приборные значения составляющих абсолютной скорости будут иметь следующие значения:
 где
где 
a, b - углы отклонения осей чувствительности датчиков 1А, 2А от плоскости горизонта.
Начальная выставка гироплатформы в азимуте может осуществляться от любых средств (устройств), определяющих положение продольной оси самолета в азимуте, имеющих в качестве выходного элемента дистанционной связи синусно-косинусный трансформатор - приемник. При использовании в качестве такого устройства магнитного корректора может быть обеспечена выставка гироплатформы по магнитному или истинному меридиану, либо по заданному направлению. В последнем случае одновременно с выставкой гироплатформы в азимуте происходит автоматическая компенсация постоянной составляющей дрейфа гироплатформы  , для чего в систему вводится вертикальная составляющая угловой скорости Земли
, для чего в систему вводится вертикальная составляющая угловой скорости Земли  формируемая в пульте управления ПНД-1 установкой географической широты местонахождения самолета.
формируемая в пульте управления ПНД-1 установкой географической широты местонахождения самолета.
В системе предусмотрена возможность автоматического ввода указанной составляющей от устройств, определяющих ее.
Принцип работы акселерометра.
Измерителем ускорений в системе ГИКВ является акселерометр, состоящий из датчика ДА-3, усилителя У-133 и масштабного сопротивления Rн.
Принцип действия акселерометра основан на уравновешивании инерционных сил, действующих на чувствительный элемент датчика, силами взаимодействия тока с полем постоянного магнита, функциональная схема акселерометра представлена на рис. 4.
Чувствительным элементом датчика ДА-3 является маятник, подвешенный на цапфах. На каркасе маятника расположены две обмотки (катушки): вторичная обмотка индукционного датчика угла и обмотка обратной связи. Под действием ускорений маятник перемещается, и вторичная обмотка индукционного датчика изменяет свое положение в поле первичной обмотки индукционного датчика, запитываемой напряжением 15 В 10 кГц.
Во вторичной обмотке индукционного датчика угла наводится ЭДС, значение которой определяется значением действующего ускорения.
Сигнал со вторичной обмотки индукционного датчика угла поступает на вход усилителя акселерометра, имеющего на выходе фазочувствительный выпрямитель. Выпрямленное напряжение с выхода усилителя подается на обмотку обратной связи, которая располагается в поле постоянного магнита.
В момент уравновешивания сил, действующих на чувствительный элемент, значение тока в обмотке обратной связи оказывается пропорциональным ускорению, действующему на чувствительный элемент, а направление тока соответствует знаку ускорения.
Последовательно с обмоткой обратной связи включено масштабное сопротивление Rн. Напряжение, снимаемое с масштабного сопротивления, пропорционально действующему ускорению.
Емкость Сн включена параллельно масштабному сопротивлению и служит для обеспечения устойчивости работы акселерометра.

Рис. 4. Функциональная схема акселерометра
Принцип работы интегратора.
В качестве интегратора в системе ГИКВ используется электромеханический интегратор постоянного тока. Он представляет собой двигатель-генератор типа ИЭ-1МА (рис.5), работающий в замкнутой системе с усилителем. Двигатель-генератор состоит из двухфазного асинхронного двигателя и тахогенератора постоянного тока, расположенных на одном валу.
Входным сигналом для интегратора является напряжение, снимаемое с масштабного сопротивления акселерометра Rн.
Условие работы акселерометра:
 , (5)
, (5)
где  - напряжение на входе УИ;
- напряжение на входе УИ;
 - напряжение на входе интегратора;
- напряжение на входе интегратора;
 - напряжение обратной связи тахогенератора.
- напряжение обратной связи тахогенератора.

Рис. 5. Функциональная схема электромеханического интегратора
Присутствие напряжения DU на входе УИ объясняется наличием постоянной времени двигатель генератора интегратора (для ИЭ-1МА 3,5 сек); DU может достигать больших значений.
Характеристика напряжения тахогенератора в зависимости от оборотов двигателя линейна с высокой точностью (для ИЭ-1МА в = 0,15%), т.е. напряжение на обмотке тахогенератора пропорционально развиваемой двигателем скорости:
 , (6)
, (6)
где  = 6 Вольт / 1000 об.мин - крутизна характеристики тахогенератора;
= 6 Вольт / 1000 об.мин - крутизна характеристики тахогенератора;
 - угловая скорость вращения вала двигатель-генератора ИЭ-1МА.
- угловая скорость вращения вала двигатель-генератора ИЭ-1МА.
Из уравнений (5) и (6) следует:
 (7)
(7)
 (8)
(8)
или
 (9)
(9)
т.е. угол поворота двигатель-генератора интегратора пропорционален интегралу от входного напряжения. Для интегрирования с высокой точностью различного рода ускорений, действующих на акселерометр, необходимо, чтобы соблюдалось равенство:
 (10)
(10)
Соблюдение равенства (10) путем непрерывного выполнения условия
 =
=  (11) невозможно из-за наличия постоянной времени двигатель-генератора.
(11) невозможно из-за наличия постоянной времени двигатель-генератора.
Равенство (10) выполняется в схеме интегратора путем применения на входе УИ интегрирующего RC фильтра (сопротивление R, конденсатор C). При больших значениях DU этот фильтр выполняет роль запоминающего устройства, информация с которого в последующие моменты времени передается на выходной вал двигатель-генератора. Сопротивление R2 предназначено для предотвращения автоколебаний вала двигатель-генератора.
Принцип работы гироскопической стабилизации.
Силовая гироскопическая стабилизация осуществляет разгрузку осей гироплатформы от вредных возмущающих воздействий: моментов трения, дебаланса и др.
Принципиальная схема работы контура силовой гироскопической стабилизации по одной из осей гироплатформы курсовертикали (по оси Оz) приведена на рис.6. Этот контур включает в себя жестко связанный с гироплатформой двухстепенный гироскоп 3Г, ось прецессии которого расположена параллельно плоскости платформы и перпендикулярна стабилизируемой оси платформы, и двигатель силовой разгрузки ДМ-10. Ротор двигателя силовой разгрузки ДМ-10 соединен непосредственно с гироплатформой, а статор через раму карданова подвеса связан с корпусом курсовертикали.
При возникновении внешнего возмущающего момента Мвозм гироскоп будет совершать прецессионное движение, поворачиваясь вокруг оси прецессии с угловой скоростью b‘.
Вследствие этого движения возникает гироскопический момент Мг, направленный в сторону, противоположную внешнему возмущающему моменту Мвозм.
Этот гироскопический момент в первое мгновение компенсирует возмущающий момент, и ось стабилизации сохраняет первоначальное положение. В дальнейшем, при повороте гироскопа вокруг оси прецессии на некоторый угол b с датчика угла ДУ-17 поступает сигнал, который после усиления подается на двигатель силовой разгрузки (датчик момента) ДМ-10.
Датчик момента ДМ-10 развивает момент стабилизации Мс, направленный в сторону, противоположную внешнему возмущающему моменту Мвозм. Таким образом, в дальнейшем внешний момент уравновешивается суммой гироскопического Мг и стабилизирующего Мс моментов. Вследствие этого скорость прецессии уменьшается до тех пор, пока не станет равной нулю (при условии Мвозм = const). Однако угол поворота гироскопа вокруг оси прецессии не будет равен нулю.
Таким образом, внешний момент Мвозм будет уравновешен моментом, развиваемым датчиком момента ДМ-10, который полностью воспримет внешнюю нагрузку, разгрузив от нее гироскоп.
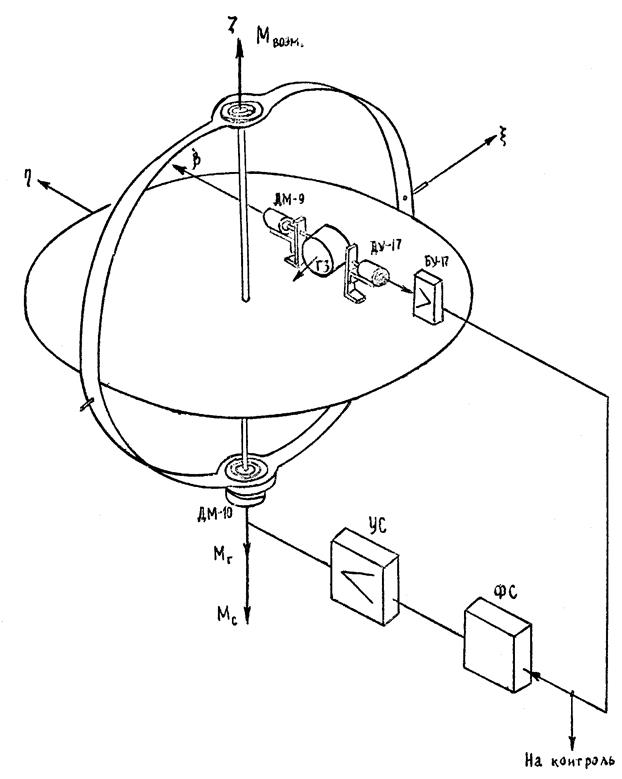
Рис. 6. Схема работы контура силовой гироскопической стабилизации по оси Oζ.
Работа силовой гироскопической стабилизации контролируется по уровню сигнала на входе фильтра стабилизации ФС.
Принцип работы каналов тангажа, крена и курса системы ГИКВ.
Для простоты изложения работа системы ГИКВ рассматривается как работа каналов тангажа, крена и курса.
Работа каналов тангажа и крена идентична. Они могут работать в режимах:
а) интегральной коррекции,
б) радиальной коррекции.
В этом режиме к гироскопам 1Г, 2Г (рис. 3) прикладываются моменты, пропорциональные интегралам от измеренных составляющих абсолютного ускорения. Сигналы с датчиков 1А, 2А акселерометров, усиленные усилителями 1УА, 2УА, поступают на интеграторы блока коррекции БК-20. Выходной сигнал интегратора, пропорциональный составляющей абсолютной угловой скорости движения самолета по соответствующей оси Оx или Оh, поступает на вход усилителей 1УДМ, 2УДМ, с выхода которых усиленные сигналы поступают на датчики момента 1ДМ, 2ДМ гироблоков 1ГБ, 2ГБ соответственно. Под действием приложенного момента гироскоп вместе с гироплатформой будет прецессировать вокруг соответствующей оси, при этом гироплатформа будет находиться в плоскости горизонта. Функциональная схема канала тангажа (крена) в режиме интегральной коррекции приведена на рис. 7.

Рис. 7. Функциональная схема тангажа (крена) в режиме интегральной коррекции.
Для создания прецессии гироплатформы с угловыми скоростями  ,
,  в системе ГИКВ используются датчики момента типа ДМ-9.
в системе ГИКВ используются датчики момента типа ДМ-9.
Датчик момента ДМ-9 представляет собой магнитное устройство, состоящее из статора в виде постоянного магнита и ротора-кольца из эпоксидного материала с впрессованной в него обмоткой. Ток, протекающий по обмотке ротора, взаимодействует с полем постоянного магнита статора и создает по оси прецессии гироскопа момент, значение которого пропорционально току. Напряжение на датчик момента поступает с выхода усилителя УДМ, который преобразует поступающее на его вход напряжение постоянного тока с потенциометра R4 интегратора в постоянное напряжение, соответствующее необходимому значению силы тока. Последовательно с обмоткой датчика момента на выходе усилителя подключено сопротивление Rобр.св., обеспечивающее глубокую обратную связь и требуемую точность работы датчика момента с усилителем.
В режиме радиальной коррекции (рис. 8) сигнал с датчика 1А (2А) акселерометра поступает на усилитель датчика моментов 1УДМ (2УДМ) и затем датчик момента 1ДМ (2ДМ) гироблока 1ГБ (2ГБ), который заставляет прецессировать гироплатформу с акселерометрами вокруг соответствующей оси к положению, перпендикулярному вектору, равному сумме векторов ускорения силы тяжести и ускорения, вызванного изменением величины и направления скорости движения самолета, т. е, к положению, перпендикулярному кажущейся вертикали. Поэтому с целью уменьшения погрешности системы ИКВ в определении вертикали рекомендуется пользоваться режимом радиальной коррекции только в условиях равномерного прямолинейного полета. В этом случае выбранный коэффициент усиления усилителя 1УДМ (2УДМ) обеспечивает необходимое напряжение на датчике моментов 1ДМ (2ДМ), пропорциональное составляющей абсолютной угловой скорости движений самолета, при этом гироплатформа отклоняется от плоскости горизонта в пределах не более ±10 угл. мин.

Рис. 8. Функциональная схема канала тангажа (крена) в режиме радиальной коррекции.
Для увеличения коэффициента усиления усилитель 1УДМ (2УДМ) в режиме радиальной коррекции используется без обратной связи. Для согласования входного сопротивления с нагрузкой служит сопротивление R.
абота внешней рамы крена.
Для обеспечения невыбиваемоети гироплатформы при сложных пространственных маневрах самолета в курсовертикали имеется внешняя рама крена. Входным сигналом следящей системы внешней рамы крена является сигнал с синусной обмотки СКТ-датчика внутренней рамы крена, причем этот сигнал минимальный при взаимно перпендикулярном положении внутренней рамы крена и рамы тангажа. Угол крена для потребителей снимается с СКТ-датчика внешней рамы крена. В качестве примера на рис.9 приведена траектория полета самолета при выполнении полупетли Нестерова и его положение относительно координатного трехгранника Оxhz. При движении самолета от точки А до точки В' значение угла тангажа увеличивается от 0 град. до 85 ± 1 град., при этом ось внешней рамы крена поворачивается вместе с самолетом относительно неподвижной рамы тангажа, и с курсовертикали снимается следующие углы маневра: при нахождении самолета в точке А (рис.10) yг = 180 град., g = 0 град., u = 0 град.; при нахождении самолета в точке В' (рис. 11) yг = 180 град., g = 0 град., u = 85 ± 1 град. В точке В' в системе ИКВ предусмотрен переворот на 180 град. внешней рамы крена для изменения на 180 град. показания курса (в соответствии с действительным движением самолета) и сохранения правильной полярности отсчета угла тангажа, при этом происходит “арретирование” внешней рамы крена.

Рис. 9. Траектория полёта самолёта при выполнении полупетли Нестерова и его положение при этом относительно координатного трёхгранника Оξηζ.
В точке В” снимаются команды “переворот рамы” и “арретирование”. При дальнейшем движении самолета от точки В” до точки С значение угла тангажа уменьшается до нуля, при этом ось внешней рамы крена поворачивается вместе с самолетом относительно неподвижной рамы тангажа, и с курсовертикали снимаются следующие углы маневра: при нахождении самолета в точке В” (рис. 12) yг = 0 град., u < 90 град., g = 0 град.; при нахождении самолета в точке С (рис. 13) yг = 0 град., u = 0 град., g = 180 град.. При движении самолета из точки С в точку Д (рис. 14) значение угла крена изменяется на 180 град., при этом с курсовертикали снимаются следующие углы маневра самолета: yг = 0 град., u = 0 град., g = 0 град..

Рис. 10. Положение рам курсовертикали при нахождении самолёта в точке А.

| 
|
| Рис. 11. Положение рам курсовертикали при нахождении самолёта в точке В’. | Рис. 12. Положение рам курсовертикали при нахождении самолёта в точке В’’. |

Рис. 13. Положение рам курсовертикали при нахождении самолёта в точке C.

Рис. 14. Положение рам курсовертикали при нахождении самолёта в точке Д.
На рис. 15 представлена функциональная схема следящей системы внешней рамы крена. Сигнал с синусной обмотки СКТ-датчика внутренней рамы крена поступает на вход ФВР через размыкающие контакты реле Р8, а с выхода УВР - на датчик момента ДМ-3.Последний обрабатывает внешнюю раму до положения, при котором рама тангажа и рама внутреннего крена перпендикулярны. Сигнал “переворот рамы” напряжением 27В выдается с ламельного устройства, установленного на оси тангажа гироплатформы курсовертикали. При угле тангажа 85 1 этот сигнал через реле Р22 и размыкающий контакт реле Р21 поступает на обмотку реле Р7, которое срабатывает и изменяет на 180 град. фазу опорного напряжения на ФВР и УВР, в результате чего происходит переворот внешней рамы крена на 180 град.. Переключение входа усилители УВР с СКТ-датчика внутренней рамы крена на СКТ-датчик внешней рамы крена подачей на обмотку реле Р8 того же сигнала "переворот рамы" обеспечивает электрическое арретирование внешней рамы крена, т.е. удержание ее с помощью датчика момента ДМ-3 относительно корпуса самолета так, что с синусной обмотки СКТ - датчика этой рамы снимается минимальный сигнал (при этом потребителям выдается g = 180 град.). Этим обеспечивается, в случае необходимости, возможность полета с углом тангажа u = 90 град. без потери устойчивости следящей системы внешней рамы крена.

Рис. 15. Функциональная схема следящей системы внешней рамы крена.
Контроль работы следящей системы внешней рамы крена осуществляется блоком контроля БК-23, который выдает напряжение 27 В на обмотки реле Р20 и Р21 при напряжении на входе соответствующем углам крена более ± 12,5 град. и при отсутствии напряжения переменного тока 36 В 400 Гц срабатывает реле Р26 БУГ-14, снимая напряжение 27 В с УВР. В частном случае, когда требуется определение углов тангажа, крена и курса в осях, связанных с самолетом (например, для формирования углов, необходимых при автоматизированном выполнении вертикальной петли), в системе ИКВ предусмотрена возможность ввода сигнала напряжением 27 В "Кабрирование".
В этом случае происходит электрическое арретирование внешней рамы крена, и информация об угле крена самолета снимается с СКТ-датчика, установленного на внутренней раме крена. Однако, если при этом значение угла крена превысит ± 12,5 град., то управление внешней рамой крена по сигналу порогового устройства БК-23 автоматически переключается с режима электрического "арретирования" на обычное управление.
Работа канала курса системы ГИКВ рассматривается взаимосвязанной с работой магнитного корректора.
Канал курса системы ГИКВ (рис. 16) может работать в режимах:
а) гирополукомпаса:
- с корректируемой в азимуте гироплатформой;
- со свободной в азимуте гироплатформой;
б) магнитной коррекции;
в) астрокоррекции;
г) коррекции от внешнего источника курсовой информации.

Рис. 16. Функциональная схема канала курса в режимах ГИК и МК.
В режиме гирополукомпаса с корректируемой в азимуте гироплатформой система ГИКВ выдает ортодромический курс yорт., при этом на гироплатформу курсовертикали КВ-1 вводится поправки на вертикальную составляющую угловой скорости вращения Земли Wz и постоянную составляющую дрейфа гироплатформы в азимуте wx. При отсутствии компенсации вертикальной составляющей угловой скорости вращения Земли платформа курсовертикали КВ-1 работает как свободная в азимуте; система ГИКВ задает в этом случае гироскопический курсор.
Режим работы канала курса, при котором осуществляется непрерывная совместная работа системы ГИКВ с МК (рис. 16), называется режимом магнитной коррекции, при этом выдаются осредненные значения магнитного курса самолета, т.е. так называемый гиромагнитный курс. Осреднение колебаний индукционного датчика МК, вызванных неравномерным движением самолета, обеспечивается соответствующим выбором постоянной времени дистанционной следящей системы, согласующей положение ДФСКТ в БК-20 с положением СКТ-приемника (М3) коррекционного механизма. Возможная в этом случае большая погрешность в измерении мгновенного изменения курса самолета исключается тем, что эти изменения регистрируются гироскопическим измерителем курса, т.е. с помощью гироплатформы, в результате чего снимается гиромагнитный курс. Для этого ДФСКТ эапитывается напряжением, снимаемым с СКТ-Д, установи ленного в КВ-1.
Показания курса, выдаваемые системой ГИКВ, могут корректироваться от любого внешнего источника курсовой информации, имеющего в качестве выходного элемента синусно-косинусный трансформатор-приемник.
В частном случае, в режиме астрокоррекции, показания курса, выдаваемые системой ГИКВ, могут корректироваться по астрокомпасу.
Работа канала курса в режиме астрокоррекции аналогична его работе в режиме магнитной коррекции, только вместо СКТ-П коррекционного механизма КМ-2 серия 1 используется подобный же СКТ-П, установленный в астрокомпасе.
ринцип работы магнитного корректора.
Для коррекции показаний канала курса системы ГИКВ по магнитному курсу используется магнитный корректор; датчиком магнитного курса служит чувствительный к магнитному полю Земли элемент. Таким элементом в магнитном корректоре является индукционный датчик ИД-6 серия 1 (ИД-6).
Известно, что магнитные полюса земного шара расположены вблизи географических полюсов Земли. Магнитное поле, создаваемое земным шаром, взаимодействуя с ферромагнитной массой магнитной стрелки, создает силы, на нее действующие. Свободно подвешенная магнитная стрелка под действием этих сил устанавливается по направлению силовых линий. Однако, моменты трения, возникающие в опорах магнитной стрелки, наличие в конструкции токоподводов для дистанционного снятия показаний, вызывают значительные затирания стрелки и, следовательно, снижают чувствительность и точность работы компаса. Вследствие этого в высоких широтах, где горизонтальная составляющая напряженности магнитного поля Земли становится меньше 0,1 Эрстед, магнитная стрелка практически перестает давать стабильные показания магнитного курса. Для увеличения чувствительности магнитного датчика применен датчик на индукционном принципе.
Принцип работы индукционного датчика ИД-6 серия 1 (ИД-6) заключается в том, что в сигнальных обмотках феррозондов возникает ЭДС, зависящая от положения продольной оси датчика относительно горизонтальной составляющей напряженности магнитного поля Земли.
Сигнальные обмотки индукционного датчика четырехпроводной линией связаны со статорными обмотками СКТ-приемника КМ-2 серия 1 (рис. 16). Напряжение, снимаемое с обмоток ротора СКТ-приемника (М1) КМ, подается на вход усилителя КМ и далее на обмотку управления двигателя, который приводит ротор СКТ-приемников в положение, соответствующее минимальному напряжению на входе усилителя. Таким образом, любому повороту индукционного датчика на какой-либо угол в горизонтальной плоскости относительно вектора горизонтальной составляющей напряженности магнитного поля Земли, т.е. углу разворота самолета будет соответствовать повороту на такой же угол ротора СКТ-приемника (М1) и ротора СКТ-приемника (М3) КМ, находящегося на одной оси с ротора СКТ-приемника (М1).
При повороте ротора СКТ-П (М3) в статорных обмотках СКТ-П и ДФСКТ прибора БК-20 (блока БГМК-4) возникает ток, пропорциональный ЭДС. Ток, протекая по статорной обмотке ДФСКТ БГМК-4, создает в ней магнитный поток, который поворачивается на угол, соответствующий углу поворота ротора СКТ-П КМ. Сигнал с ротора СКТ-П КМ поступает на вход усилителя У-109 блока БК-20, а с выхода усилителя на двигатель БГМК-4, который отрабатывает ротор ДФСКТ блока ВГМК-4 до тех пор, пока сигнал на входе усилители У-109 не станет минимальным.
С другой стороны, при повороте ротора СКТ-Д курсовертикали КВ-1 магнитный поток ротора ДФСКТ БГМК-4, соединенного электрически со статорной обмоткой СКТ-Д КВ-1, повернется на тот же угол, что и ротор СКТ-Д КВ-1. Таким образом, ДФСКТ блока ВГМК-4 поворачивает результирующий магнитный поток на угол, равный алгебраической сумме углов поворота ротора и статора ДФСКТ блока БГМК-4.
Так как согласование происходит со скоростью не более 1,5 град./мин, то со статора ДФСКТ блока БГМК-4 снимается осредненное, без колебаний, значение магнитного курса, так называемый гиромагнитный курс yгмк. Если рассогласование велико, то согласование можно ускорить нажатием кнопки "Соглас." на пульте управления ПНД-1. При этом на электромагнитную муфту ЭМ блока БГМК-4 поступает напряжение 27 В и происходит переключение передаточного числа редуктора. Скорость согласования при этом увеличивается не менее чем до 10 град./сек.
Истинный курс самолета может быть получен после ввода на коррекционном механизме текущего значения магнитного склонения DМ. Магнитное склонение - угол между северным направлением истинного и магнитного меридианов. Магнитное склонение, отсчитанное от истинного меридиана по часовой стрелке, имеет знак "+" и против часовой стрелки - знак "-".
На индукционный датчик помимо магнитного поля Земли действует магнитное поле самолета. Магнитное поле самолета снижает точность определения магнитного курса, является помехой в повышении точности магнитного корректора. Основным источником этой помехи являются ферромагнитные массы: стальные детали конструкции, стальные тросы, двигатели и т.д. Отклонения от действительного магнитного курса, вызванные вышеуказанными причинами, и составляют девиацию. Для правильной компенсации девиации требуется различать основные погрешности, связанные с полукруговой девиацией и четвертной девиацией.
Полукруговая девиация вызывается “твердым железом”, имеющимся на самолете. Другой вид девиации объясняется наличием магнитомягких материалов, благодаря которым возникают поля при наличии магнитного поля Земли. Эта девиация называется девиацией "мягкого железа" и носит четвертной характер. Эта погрешность значительно меньше полукруговой.
Для устранения инструментальных ошибок и четвертной девиации магнитного корректора в коррекционном механизме предусмотрено электрическое локальное устройство.

