




ПРАКТИЧЕСКАЯ РАБОТА № 1
Тема: Структурный синтез механизмов
Цель занятия: знакомство с элементами структуры механизма, расчетом подвижности, устранением избыточных связей.
Оснащение: методические указания по выполнению практической работы.
Работа рассчитана на 4 академических часа.
бщие теоретические сведения.
Для изучения строения механизма используется его структурная схема. Часто эту схему механизма совмещают с его кинематической схемой. Так как основными структурными составляющими механизма являются звенья и образуемые ими кинематические пары, то под структурным анализом понимается анализ самих звеньев, характер их соединения в кинематические пары, возможность проворачиваемости, анализ углов давления. Поэтому в работе даются определения механизма, звеньев, кинематических пар. В связи с выбором способа исследования механизма рассматривается вопрос о его классификации. Приводится классификация, предложенная Л.В.Ассуром. При выполнении лабораторной работы используются модели плоских рычажных механизмов, имеющихся на кафедре.
Механизм - это система взаимосвязанных твердых тел с определенными относительными движениями. В теории механизмов упомянутые твердые тела называют звеньями.
Звено - это то, что движется в механизме как одно целое. Оно может состоять из одной детали, но может включать в себя и несколько деталей, жестко связанных между собой.
Основные звенья механизма - это кривошип, ползун, коромысло, шатун, кулиса, камень. Указанные подвижные звенья монтируются на неподвижной стойке.
Кинематическая пара - это подвижное соединение двух звеньев. Кинематические пары классифицируются по ряду признаков - характеру соприкосновения звеньев, виду их относительного движения, относительной подвижности звеньев, по расположению траекторий движения точек звеньев в пространстве.
Для исследования механизма (кинематического, силового) строится его кинематическая схема. Для конкретного механизма - в стандартном машиностроительном масштабе. Элементами кинематической схемы являются звенья: входное, выходное, промежуточные, а также обобщенная координата. Число обобщенных координат и, следовательно, входных звеньев, равно подвижности механизма относительно стойки –W3.
Подвижность плоского механизма определяется по структурной формуле Чебышева (1):
 (1)
(1)
где n- количество всех звеньев механизма;
P1, P2 - число одно и двухподвижных кинематических пар в механизме.
Из-за погрешностей при изготовлении механизмов возникают вредные пассивные связи q - (избыточные), которые приводят к дополнительным деформациям и потерям энергии на эти деформации. При конструировании они должны быть выявлены и устранены. Количество их выявляется по структурной формуле Сомова – Малышева (2):
 (2)
(2)
В механизме без избыточных связей q ≤ 0 Устранение их достигается изменением подвижности отдельных кинематических пар.
Присоединение структурных групп Ассура к ведущему звену является наиболее удобным методом построения схемы механизма. Группой Ассура называется кинематическая цепь, которая при соединении внешних пар к стойке получает нулевую степень подвижности. Простейшая группа Ассура образуется двумя звеньями, соединенными кинематической парой. Стойка в группу не входит. Группа имеет класс и порядок. Порядок определяется количеством элементов внешних кинематических пар, которыми группа присоединяется к схеме механизма. Класс определяется числом К, которое должно удовлетворять соотношению:
 (3)
(3)
где P- количество кинематических пар, включая элементы пар, Q1 количество звеньев в группе Ассура.
Класс и порядок данного механизма соответствует классу и порядку старшей группы Ассура в этом механизме. Цель классификации – выбор способа исследования механизма.
Среди всего многообразия конструкций механизмов различают: стержневые (рычажные), кулачковые, фрикционные, зубчатые механизмы, механизмы с гибкими звеньями (например, ременные передачи) и др. виды (рис. 1).
Менее распространенные классификации подразумевают наличие механизмов с низшими или высшими парами в плоском или пространственном исполнении и т.д.
 |
Рисунок 1- Виды механизмов
Учитывая возможность условного превращения практически любого механизма с высшими парами в рычажный, в дальнейшем наиболее подробно рассматривается именно эти механизмы.
формление отчета
Отчет должен содержать:
1. Наименование работы.
2. Цель работы.
3. Основные формулы.
4. Решение задачи.
5. Вывод по решенной задаче.
Пример структурного анализа механизма
Выполните структурный анализ рычажного механизма.
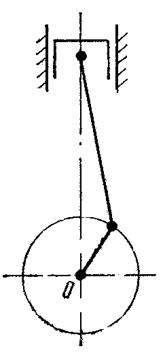
Задана кинематическая схема рычажного механизма в стандартном машиностроительном масштабе в определенном углом α положении (рис.1г).
Определите количество звеньев и кинематических пар, классифицируйте звенья и кинематические пары, определите степень подвижности механизма по формуле Чебышева, установите класс и порядок механизма. Выявите и устраните избыточные связи.
Последовательность действий:
1.Классифицируйте звенья: 1- кривошип, 2- шатун, 3- коромысло, 4- стойка. Всего 4 звена
2. Классифицируйте кинематические пары: О, А, В, С – одноподвижные, плоские, вращательные, низшие; 4-кинематические пары.
3. Определите подвижность механизма по формуле:
W3=3(n-1)-(2P1+1P2)=3(4-1)-(2*4+1*0)=1 (4)
4. Установите класс и порядок механизма по Ассуру:
Наметьте и мысленно выделите из схемы ведущую часть - механизм 1 класса (М 1К - звенья 1,4, соединение кривошипа со стойкой, рис.2). Их количество равно подвижности механизма (определена в пункте 3).

Рисунок 2. Схема механизма
Оставшуюся (ведомую) часть схемы механизма разложите на группы Ассура. (В рассматриваемом примере оставшуюся часть представляют лишь два звена 2,3.)
Первой выделяется группа, наиболее удаленная от механизма 1 класса, простейшая (звенья 2,3, рис.3). В этой группе число звеньев n’=2, а число целых кинематических пар и элементов кинематических пар в сумме Р =3 (В –кинематическая пара, А,С – элементы кинематических пар). При выделении каждой очередной группы подвижность оставшейся части не должна изменяться. Степень подвижности группы Ассура 2-3 равна
 (5)
(5)
Класс группы определяем из простейшей системы двух уравнений:
p=3K;3=3K; (6)
n’=2K; 2=2K,
откуда Класс группы равен 1.
Порядок группы равен 2, т. к. группа присоединяется к основному механизму двумя элементами кинематических пар А, С.
Следовательно, рассматриваемая группа Ассура является группой 1 Класса 2 Порядка.
Формула строения механизма:
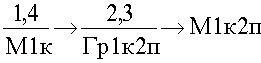 (7)
(7)
Всему механизму присваивается класс и порядок наивысший, т.е. - М1К 2П.
5. Выявите и устраните избыточные связи.
Количество избыточных связей в механизме определяется выражением:
 (8)
(8)
В механизме все пары одноподвижные P1=4 а число звеньев n равно 4. Количество избыточных связей:
 (9)
(9)
Устраняем избыточные связи. Заменяем одноподвижную пару А, например, на вращательную двухподвижную (рис.1), а одноподвижную пару В на трехподвижную (сферическую рис.1). Тогда число избыточных связей определится следующим образом:
 (10)
(10)
3. Задания:
Выполните структурный анализ рычажного механизма.
Задана кинематическая схема рычажного механизма в стандартном машиностроительном масштабе в определенном углом α положении.
Определите количество звеньев и кинематических пар, классифицировать звенья и кинематические пары, определите степень подвижности механизма по формуле Чебышева, установите класс и порядок механизма. Выявите и устраните избыточные связи.
 |
Вариант 1
Вариант 2

Вариант 3

Вариант 4

Вариант 5
4. Контрольные вопросы
1. Определение звена.
2. Определение механизма.
3. Классификация звеньев.
4. Определение кинематической пары.
5. Классификация кинематических пар.
6. Что такое элементы кинематических пар?
7. Что называется кинематической схемой механизма?
8. Чему равна подвижность механизма по формуле Чебышева?
9. Определение группы Ассура.
10. Как определяется порядок группы Ассура?
11. Как определяется класс группы Ассура?
12. Чему равен класс и порядок механизма?
13. Что такое вредные избыточные связи?
14. Как устранить избыточные связи?
ПРАКТИЧЕСКАЯ РАБОТА №2
Тема: Критерии работоспособности и расчета деталей машин.
Цель занятия: знакомство с критериями работоспособности механизма.
Оснащение: методические указания по выполнению практической работы.
Работа рассчитана на 6 академических часов.

