




–ис.1. ƒвижители.
Ѕолее совершенна€ конструкци€ подобного движител€ пред≠ставлена на рис. 1, а. ќсновное его отличие от предыдущего состоит в том, что гидроцнлиндры 1 установлены на ступице 2 с возможностью поворота. Ѕлагодар€ этому обеспечиваетс€ пре≠имущественное нормальное к опорной поверхности перемещении опорных п€т и, следовательно, снижаетс€ сопротивление дви≠жению.
≈ще одна конструкци€ движителей этой группы представлена на рис. 1, б. «десь опорные элементы выполнены в виде изогнутых по окружности секций 4, шарнирно закрепленных одним концом на штоках цилиндров 1, а вторым Ч на жестких спицах 3 ступицы. ѕри таком выполнении опорных элементов увеличиваетс€ площадь опорной поверхности. Ѕолее совершенна€ конструкци€ подобного движител€ представлена на рис. 1, в. ¬ нем дл€ повышени€ т€гового усили€ сегментные опоры 5 обоими концами закреплены на штоках цилиндров 1. ѕричем передний по ходу движени€ цилиндр вступает в работу (выдви≠гаетс€) после полного выхода заднего.
»звестен также движитель транспортного средства, в кото≠ром поступательное перемещение штоков цилиндров с помощью планетарной зубчатой передачи преобразуетс€ во вращающий момент, приложенный к ступице. ќднако этот движитель не обладает достаточной адаптацией к неровност€м поверхности движени€. ¬ то же врем€ он, единственный из всех приведенных движителей, способен развивать т€говое усилие, ограничи≠ваемое только сцеплением опорных элементов с грунтом.
¬тора€ группа шагающих колесных движителей основана на изобретении ё. ћацкерле (ѕрага) (рис. 2.).

–ис. 2. —хема колеса ё. ћацкеле
ќсновные отличи€ движителей этой группы Ч наличие гибких, наполн€емых газом камер и €рко выраженный эф≠фект шагающего переме≠щени€. ё. ћацкерле не зр€ назвал этот движитель Ђ–отопедї, т. е. вращающиес€ ноги.
онструкци€ простейшего движител€ этой группы и особен≠ности взаимодействи€ его с деформируемым грунтом будут пон€тны из рис. 3.

–ис. 3. —хема устройства и взаимодействи€ пневмодвижител€ с деформируемым грунтом.
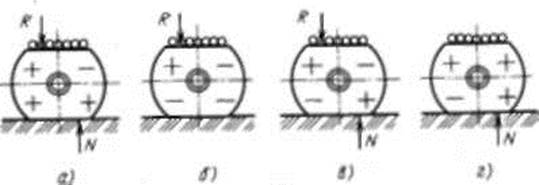
Ќа неподвижно установленную в корпусе транспортного средства полую ось 1 с возможностью вращени€ посажена ступица 2, Ќа ней закреплены гибкие камеры 3, св€занные по внешней поверхности гибким бандажом 4, обра≠зующим сплошную беговую дорожку. амеры в зависимости от положени€ ступицы соединены отверсти€ми в ступице и оси или с полостью ј оси, в которую подаетс€ сжатый воздух, или с полостью Ѕ, в которой поддерживаетс€ более низкое избыточное давление. ¬ некоторых случа€х воздух из полости Ѕ откачи≠ваетс€ и, таким образом, избыточное давление в ней отсутствует.
¬ исходном положении задние камеры, соеди≠ненные с полостью ј оси, определенным образом деформируют грунт. Ћегко заметить, что равнодействующа€ элементарных нормальных реакций грунта на камеры движител€ смещена отно≠сительно оси вращени€ на некоторое рассто€ние. «а счет этого образуетс€ вращающий момент, стрем€щийс€ повернуть камеры н ступицу по часовой стрелке и переместить движитель слева направо. ¬ последующий момент камеры и ступица движител€ повернутс€ на небольшой угол, и с полостью ј оси соеди≠нитс€ очередна€ камера. «а доли секунды давление воздуха в этой камере возрастает до давлени€, близкого к давлению в полости ј оси, и грунт под ней деформируетс€.
|
|
|
ѕри выполнении опорных элементов такого движител€ в виде дискретных гибких камер (рис. 4.) эффект шагающего перемещени€ максимален, так как горизонтальные составл€ющие реакций грунта на боковые стенки камер могут взаимно уравновешиватьс€. —опротивление движению близко к нулю как и горизонтальна€ составл€юща€ суммарной реакции грунта на камеры, хот€ это не означает, что затраты энергии на деформа≠цию грунта отсутствуют.

–ис 4. ѕневмодвижители с дискретными опорными камерами
≈ще одно немаловажное достоинство шагающих колесных пневмодвижителей Ч простота конструкции и простота передачи энергии от двигател€ к движител€м. ќсобенно €рко последнее про€вл€етс€ в полноприводных машинах с большим количеством колес. ¬ них функции т€желой и сложной трансмиссии, как правило, с несколькими дифференциалами выполн€ет корпус Ч воздуховод. Ёто позвол€ет значительно облегчить и упростить конструкцию машины, а также повысить ее проходимость. ѕоследнее св€зано с тем, что все колеса взаимодействуют с грунтом независимо одно от другого, развива€ максимально возможное т€говое усилие.
ќднако описанные конструкции шагающих колесных пневмо≠движителей имеют существенный органический недостаток. ќн заключаетс€ в том, что максимальное т€говое усилие, которое эти движители могут развивать при достаточном коэффициенте сцеплени€, мало и, как правило, не превышает 0,3...0,4 сцепного веса.
роме того, при движении по неровной опорной поверхности задние отталкивающиес€ опорные элементы могут попасть в уг≠лубление, и т€говое усилие вообще пропадает. “о же происходит при движении по слабонесущему грунту, когда задние опорные элементы проваливаютс€ на более слабых локальных участках.
¬ јкадемической лаборатории проблем бездорожного транс≠порта при Ќовосибирском электротехническом институте и его ќтраслевой лаборатории внедорожных транспортных и техноло≠гических средств предложен более эффективный и простой, по мнению авторов, способ повышени€ т€гового усили€ и проходи≠мости шагающих колесных пневмодвижителей (рис. 5.). ќн заключаетс€ в том, что необходимый дополнительный вращаю≠щий момент создаетс€ самим движителем за счет активного взаимодействи€ его опорных элементов с роликовым конвейером, установленным сверху. –ежим повышенной грузоподъемности осуществл€етс€ только за счет взаимодействи€ опорных элемен≠тов с неподвижно зафиксированным относительно оси вращени€ роликовым конвейером. Ќа этом режиме развиваемое движите≠лем т€говое усилие, как правило, достаточно. Ѕолее того его можно легко увеличить путем повышени€ давлени€ воздуха. —ледовательно, произойдет увеличение суммарной нормальной реакции роликового конвейера на камеры, вырастает и разви≠ваемый пневмодвижителем вращающий момент.
|
–ис. 5. —хема и режимы работы пневмодвижител€ с роликовым конвейером.
—истемы с шагающим принципом перемещении колеса
ѕоиск новых эффективных способов передвижени€ в услови€х бездорожь€ привел к идее реализовать в одном движителе процесс качени€ и шагани€. “акой комбинированный движитель можно определить как обычный шагающий, у которого опоры механизмов шагани€ представл€ют собой колесные или гусенич≠ные модули, при этом последние, нар€ду с выполнением функции опорных элементов шагающего движители, работают и как обычные колеса или гусеницы. ѕричем механизм шагани€ целесообразно использовать лишь в наиболее т€желых услови€х движени€, когда пробуксовывание колес или гусениц создает угрозу подвижности машины, а в обычных услови€х Ч рацио≠нальнее работать с таким вездеходом, как с традиционной колес≠ной или гусеничной машиной. “акое сочетание функций дает возможность реализовать различные варианты организа≠ции процесса работы комбинированного движител€, различаю≠щиес€ последовательностью и способом переноса колесных или гусеничных модулей, состо€нием переносимых и упорных моду≠лей, способом перемещени€ корпуса машины, параметрами процесса шагани€, распределением нагрузки на модули. роме того, осуществл€ютс€ различные схемы привода движител€.
|
|
|
ќтличительной особенностью движител€, предложенного ≈. ј.¬агнером (рис. 6) (схема √о-девиль), €вл€етс€ то, что продольные рычаги подвески, на которых установлены колеса, могут поворачиватьс€ относительно оси креплени€ рыча≠га на 360∞. »меютс€ раздельные силовые приводы к колесам и рычагам подвески. ѕри использовании привода к колесам движитель не отличаетс€ от обычного колесного. ѕри вращении рычагов подвески движитель
становитс€ шагающим. ћетод шагани€ используетс€ только на сильно деформируемых грунтах и при преодолении преп€тствий. ¬озможность движени€ в дан≠ных услови€х определ€етс€ несушей способностью грунта и сопротивлением грунта сдвигу. 
–ис. 6. олесно-шагающий движитель.
ѕланетарно-катковые движители (ѕ ƒ)
ѕопытки сочетани€ в одной конструкции положительных качеств разных движителей и механизмов привели к по€влению семейства планетарно-катковых движителей. ѕ ƒ Ч сочетание свойства колеса, катка, гусеницы, планетарного механизма, скольз€щей лыжи и понтона. ¬ зависимости от свойств опорной поверхности, на которой должна двигатьс€ машина, в конструк≠ции конкретного ѕ ƒ усиливаютс€ качества элементов того движител€, который наиболее приспособлен к таким услови€м, а структура конструкции, содержаща€ основные принципы устройства простейшего планетарного механизма, обеспечивает универсальность движител€.
ѕневматическа€ гусеница ƒ. ѕеккера (—Ўј) (рис. 7) представл€ет собой совокупность пневмоэлементов, св€занных между собой бесконечной резинокордной лентой. ѕневмоэлемент сложной конфигурации в поперечном сечении имеет вид сег≠мента. Ќеобходимое давление в шине поддерживаетс€ подкачиванием воздуха через вентиль. ƒл€ принудительного при≠вода, а также дл€ фиксации гусеницы на внутренней части резннокордной ленты в центральной части выполнен клиновид≠ный выступ, который входит в такой же клиновидный желоб, выполненный на ведущем колесе-звездочке.
ѕланетарно-катковый движитель ƒ. —аппа (—Ўј) (рис. 7) включает пневмокатковую цепь. ѕневматические катки консольно насажены по два на удлиненные оси, св€занные по центрам металлической длиннозвенчатой цепью. ќбкатывание катков происходит по жесткой направл€ющей.

–ис.7 ѕневмогусеница ѕеккера(справа) и движитель —аппа с пневмокатковой цепью(слева).
ƒвижитель јвенариуса (рис. 8) в качестве основных опорных элементов имеет жесткие катки относительно малого диаметра и малой ширины. атки свободно смонтированы на ос€х звеньев бесконечной гусеничной цепи и при движении по жесткой опорной поверхности могут прокатыватьс€ под нижней опорной поверхностью корпуса, выполненной в виде лыжи. ¬ таком случае скорость движении машины примерно в 2 раза больше, чем скорость перематывани€ каткового обвода. ѕри движении по м€гкому грунту, в частности по снегу, катки полностью погружаютс€ в него, и корпус скользит по каткам и снегу, выступающему над ними. атки и оси катков в таком случае выполн€ют функции развитых грунтозацепов, обеспечи≠ва€ высокое объемное сцепление с грунтом. —корость движени€ в этом случае равна скорости перематывани€ обвода.
|
|
|
ƒвижитель ћарша, включающий в себ€ жесткие катки, развити€ не получил ввиду больших динамических нагрузок на грунт, высокого сопротивлени€ движению и малой надежности конструкции.

–ис. 8 ƒвижитель јвенариуса(справа) и амфиби€ ренделла(слева).
—оздание в начале 50-х годов пневматических шин типа Ђроллигонї, у которых ширина соизмерима с диаметром или больше него, открыло перспективу дальнейшего развитии планетарно-катковых систем. “ак по€вилс€ экипаж-амфиби€ ренделла (—Ўј) (рис. 8), состо€щий из корпуса с высту≠пающими по обе стороны полыми несущими кронштейнами-пон≠тонами, по горизонтальной поверхности которых обкатываютс€ пневмокатковые гусеницы. ќси пневмокатков св€заны между собой металлическими тросами. ѕривод гусениц осуществл€≠етс€ специальными дисками. √усеница хорошо самоочищаетс€ от грунта и достаточно надежно фиксируетс€ на корпусе. Ќедос≠татком гусеницы €вл€етс€ наличие большого количества мест креплени€ деталей к тросу, сложный монтаж и наладка.
ѕринцип работы шагающего колеса ¬агнера положен в основу многокаткового колеса по патенту я. ¬. олвина и –. ¬. ‘осина. ѕри этом обеспечиваетс€ непрерывное перемещение корпуса одновременно на четырех колесах (рис. 9). ƒвижитель с такими колесами по сравнению с движителем типа рычажное колесо обеспе≠чивает большую плавность движени€, большую скорость движе≠ни€ методом шагани€, меньшие затраты энергии на перемещение корпуса. роме того, в этом случае машину можно использовать как обычную колесную (с формулой 8X8и 4X4), однако движитель получаетс€ более сложный и т€желый, чем рычажное колесо. ƒопустимый диаметр катков у него значительно меньше, проходимость по м€гким грунтам ниже, снижаетс€ возможность преодолени€ различных преп€тствий.
ќбщим конструктивным недостатком планетарно-колесно-шагающих движителей €вл€етс€ трудность обеспечени€ поворота.

–ис.9 ѕланетарно-колесный движитель ‘осина.

