




О.А. Вильдфлуш, А.В. Марков
Элементы и устройства систем управления
Конспект лекций
для студентов специальности
I-53 01 07 «Информационные технологии и управление
в технических системах»
всех форм обучения
Часть 2
Минск 2007
Оглавление
1. Введение. Основные понятия и определения. 3
2. Электромагнитные элементы и устройства систем управления. 6
2.1. Единицы магнитных величин. 6
2.2. Тяговый электромагнит. 7
2.3. Электромагнитные опоры.. 12
2.4. Электромагнитные реле. 14
3. Преобразователи измерительной информации (датчики)
в системах управления. 34
3.1. Классификация датчиков. 34
3.2 Основные характеристики датчиков. 36
3.3. Параметрические датчики. 38
3.4. Генераторные датчики. 44
Список литературы: 47
Введение. Основные понятия и определения
Вторая часть курса лекций по дисциплине «Элементы и устройства систем управления» содержит разделы для изучения электромагнитных исполнительных устройств и преобразователей измерительной информации (датчиков) систем управления техническими объектами.
Указанные устройства выполняют весьма важные функции по преобразованию и предварительной обработке информации в системах управления.
К таким функциям относятся: преобразование маломощных сигналов ЭВМ в мощные сигналы управления включением (выключением) электромагнитных устройств: преобразование электрических сигналов в линейные или круговые перемещения исполнительных устройств; преобразование физических параметров (температура, давление, расход, скорость и т.д.) в электрические сигналы.
Очевидно, эффективность всей системы управления во многом определяется эффективностью перечисленных преобразователей информации. Потеря информации, поступающей от различных датчиков системы управления, не может быть восстановлена в центральном процессоре. Аналогично несовершенство (низкое быстродействие и точность) исполнительных устройств резко снижает эффективность системы управления.
В технике преобразования и обработки информации можно выделить такие основные компоненты, как элемент, устройство, система.
Элемент – простейшая схема, реализующая функциональную
операцию.
Устройство – совокупность элементов, выполняющих несколько операций (преобразования информации).
Система – это множество взаимосвязанных элементов и устройств, т.е. система состоит из множества элементов и устройств и связей между ними. Важнейшим свойством системы является целостность. Если множество элементов (устройств) имеет изолированные элементы (устройства), то его можно рассматривать как несколько систем.
Технологический процесс представляет совокупность способов получения и переработки сырья, материалов или изделий, обеспечивающих качественное их изменение. Процессы контроля и управления составляют основу систем автоматизации технологических процессов. Функционально следует различать системы автоматизации контроля, управления и регулирования.
Системы стабилизации обеспечивают поддержание заданного значения управляемой величины. Например, стабилизации температуры, силы давления. Программное регулирование осуществляется в тех случаях, когда известен (задан) закон изменения управляемой величины во времени. Следящие системы изменяют управляемую характеристику или величину в зависимости от неизвестного (неуправляемого) параметра, поступающего на вход.
По способу представления информации системы управления и контроля подразделяют на аналоговые, цифровые (дискретные) и аналогово-цифровые. Устройства с аналоговой формой представления информации преобразуют непрерывно изменяющиеся во времени электрические сигналы. Цифровые устройства преобразуют сигналы, представленные в виде импульсов или в виде цифровых кодов. Аналогово-цифровые устройства сочетают в себе преобразование как аналоговых, так и цифровых сигналов.
Исполнительным устройством называют устройство преобразования сигналов управления в перемещение регулирующего органа. К элементам и устройствам, преобразующим сигналы ЭВМ в сигналы управления исполнительными устройствами можно отнести электромагнитные реле, магнитные усилители, оптроны, транзисторные ключи, тиристоры. Основными функциями таких элементов и устройств являются усиление сигналов управления по мощности и гальваническая развязка исполнительных устройств от ЭВМ.
Преобразователи измерительной информации (датчики) систем управления используются для измерения физических параметров (температура, скорость, уровень жидкости, давление, и т.п.) в аналоговые или цифровые электрические сигналы.
На рисунке 1.1 представлена структурная схема системы стабилизации силы сжатия схватом робота объекта манипулирования. Данная схема иллюстрирует практическое применение электромагнитных устройств и преобразователей измерительных сигналов в системе управления.
Рисунок 1.1. структурная схема системы стабилизации силы сжатия схватом робота объекта манипулирования
1 – объект манипулирования; 2 – тензодатчики; 3 – схват робота; поворотный шарнир; 5 – возвратная пружина; 6 – подвижные магнито-проводящие элементы; 7 – магнитопровод электромагнита; 8 – катушка электромагнита
Принцип действия системы (рисунок 1.1) заключается в стабилизации усилия сжатия схватом 3 робота, объекта манипулирования 1. В исходном состоянии под действием возвратной пружины 5 схват открыт и на объект манипулирования 1 не оказывается усилие сжатия.
Под действием сигналов управления, поступающим от микропроцессора в электромагнитное исполнительное утройство 6.7.8 через цифро-аналоговый преобразователь (ЦАП) и усилитель мощности, схват 3 поворачивается в шарнире 4 и возникает усилие сжатия схватом 3 объекта манипулирования 1. При протекании в катушке электромагнита 8 электрического тока управления возникает электромагнитная сила, которая притягивает элементы 6 и тем самым осуществляется сжатие схватом 3 объекта манипулирования 1.
Величина усилия сжатия измеряется тензодатчиками (датчиками силы) 2, расположенными на схвате 3. Измерительные сигналы тензодатчиков усиливаются дифференциальным усилителем и через аналогово-цифровой преобразователь поступают на вход микропроцессора.
В результате обработки, измерительной информации, микропроцессор выдает в электромагнитное устройство 6, 7, 8, сигналы управления, поддерживающие усилие сжатия схватом робота объекта манипулирования на данном (стабильном) уровне.
Из принципа действия системы (рисунок 1) следует, что ее точностные характеристики определяются чувствительностью работы тензодатчиков 2, а быстродействие от динамических характеристик электромагнитного исполнительного устройства (6, 7, 8).
ЭЛЕКТРОМАГНИТНЫЕ ЭЛЕМЕНТЫ И УСТРОЙСТВА СИСТЕМ УПРАВЛЕНИЯ
Единицы магнитных величин
Основной характеристикой магнитных материалов (веществ) является магнитная проницаемость или относительная магнитная проницаемость
 (2.1)
(2.1)
где В(тл) – магнитная индукция поля в данном веществе;  – напряженность магнитного поля.
– напряженность магнитного поля.
Магнитная проницаемость (2.1) показывает, во сколько раз проницаемость вещества больше проницаемости вакуума  гн/м (магнитная постоянная).
гн/м (магнитная постоянная).
При расчетах по формуле (2.1) используются кривые намагничивания  для заданного магнитного материала.
для заданного магнитного материала.
Магнитная индукция в веществе определяется как:
 , (2.2)
, (2.2)
где Ф(В  ) – магнитный поток (поток магнитной индукции); S м (м2) – площадь магнитного материала (сердечника) через которую проходит магнитный поток.
) – магнитный поток (поток магнитной индукции); S м (м2) – площадь магнитного материала (сердечника) через которую проходит магнитный поток.
Для оценки напряженности магнитного поля используется выражение
 (2.3)
(2.3)
где I 0(а) – ток в катушке индуктивности;  – намагничивающая сила (магнитодвижущая сила – М.Д.С.);
– намагничивающая сила (магнитодвижущая сила – М.Д.С.);  – средняя длина магнитного потока (длина средней линии магнитной индукции).
– средняя длина магнитного потока (длина средней линии магнитной индукции).
Сопротивление магнитной цепи (магнитное сопротивление) определяется выражением
 . (2.4)
. (2.4)
Обратная величина Rм называется магнитной проводимостью
 . (2.5)
. (2.5)
Характеристикой сцепления витков (W) катушки индуктивности с магнитным потоком (Ф) является потокосцепление
 . (2.6)
. (2.6)
Индуктивность катушки связана с потокосцеплением и током в ее обмотке следующей зависимостью:
 . (2.7)
. (2.7)
С учетом (2.1), (2.2), (2.3), (2.4), (2.6) выражение (2.7) для оценки индуктивности можно представить в виде
 . (2.8)
. (2.8)
Тяговый электромагнит
Тяговый электромагнит является основным элементом, реализующим линейные и круговые перемещения подвижных объектов в электромагнитных исполнительных устройствах. На примере системы стабилизации усилия сжатия схвата робота (рисунок 2.1) очевидны преимущества электромагнитного привода по сравнению с электрическими двигателями при перемещении подвижных элементов на небольшие расстояния (до 100 мм) с тяговыми усилиями в диапазоне от 0 до 100 Н.
К таким преимуществам можно отнести сравнительно высокое быстродействие (время перемещения не более десятков миллисекунд), высокая точность (точность расположения объекта в начальной и конечной точках перемещения определяется погрешностями размещения механических ограничителей или упоров), простота конструкции и высокая надежность.
На рисунке 2.2 представлена конструкция линейного нереверсивного (нейтрального) электромагнита. В исходном состоянии под действием возвратной пружины якорь смещается до соприкосновения упора 2 с корпусом в положение с максимальным воздушным зазором  (первое устойчивое положение).
(первое устойчивое положение).
При подключении катушки электромагнита к источнику напряжения или тока возникает постоянное магнитное поле, которое формирует на упорах 1, 2 (полюсных наконечниках) разноименные полюса S, N.
Таким образом между полюсами S, N возникает сила электромагнитного притяжения (электромагнитная сила P э), которая перемещает якорь до соприкосновения упоров 1, 2 в положение с минимальным воздушным зазором (второе устойчивое состояние).
Рисунок 2.2. Тяговый электромагнит
Параметр P э является тяговой характеристикой электромагнита, для его определения необходимо знать энергию электромагнита
 . (2.9)
. (2.9)
При отсутствии насыщения в ферромагнитном корпусе и якоре, характеристика Ф(I 0) линейна тогда:
 . (2.10)
. (2.10)
Или с учетом (2.10)
 . (2.11)
. (2.11)
Энергия магнитного поля (2.11) в процессе линейного перемещения якоря по оси Х (ось Х совпадает с осью якоря) преобразуется в механическую в виде работы силы P э электромагнитного притяжения (производной от Θ по Х).
 . (2.12)
. (2.12)
Поскольку проводимость Gм магнитной системы с воздушным зазором  определяется проводимостью G 0 воздушного зазора
определяется проводимостью G 0 воздушного зазора  , то для плоскопараллельного воздушного зазора (рисунок 2.2) можно записать
, то для плоскопараллельного воздушного зазора (рисунок 2.2) можно записать
 , (2.13)
, (2.13)
где  , переходя к координате
, переходя к координате  , получаем
, получаем
 . (2.14)
. (2.14)
Знак минус в выражении (2.14) показывает, что положительному электромагнитному усилию Pэ соответствует уменьшение воздушного зазора l 0 .
Окончательно с учетом того, что F нс = I 0 W 0 получаем
 . (2.15)
. (2.15)
Тяговая характеристика (2.15) представлена на графике (рисунок 2.3)
 Рисунок 2.3. Тяговые характеристики (а) и коническая конструкция
Рисунок 2.3. Тяговые характеристики (а) и коническая конструкция
полюсных наконечников электромагнита (б)
Недостатком характеристики Pэ (рисунок 2.3, а) является ее высокая крутизна при небольших воздушных зазорах . Для устранения данного
недостатка необходимо использовать коническую форму полюсных наконечников электромагнита (рисунок 2.3, б). При этом согласно чертежу (рисунок 2.3, б) S мк = S м/cos α, а тяговое усиление электромагнита с конусными наконечниками составит
Рэк = Pэ /cos2 α (2.16)
Быстродействие электромагнита определяется временем tср его срабатывания, т.е tср – время от момента подачи импульса на срабатывание до момента перемещения якоря из одного устойчивого положения в другое. Время срабатывания состоит в основном из двух составляющих
tср = t тр + t дв, (2.17)
где t тр – время трогания (промежуток времени с момента подачи импульса напряжения в катушку электромагнита до момента начала движения якоря до полной его остановки).
Наличие ферромагнитных материалов (корпус, якорь) и сравнительно большое количество витков W 0 (и следовательно L 0) катушки электромагнита (рисунок 2.2) делает параметр t тр преобладающим над t дв. Обычно для  t дв = (0,1 – 0,3) t тр.
t дв = (0,1 – 0,3) t тр.
Для оценки величины t тр воспользуемся эквивалентной схемой включения электромагнита (рисунок 2.4).
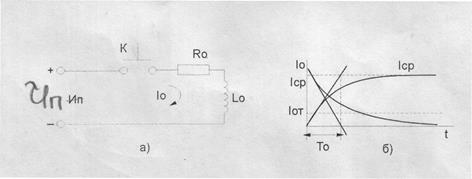
Рисунок 2.4. К оценке переходных процессов электромагнита:
а) схема включения, б) графики функций I 0(t) от времени t
При подключении электромагнита (ключом К) к источнику питания Uп переходной процесс в схеме (рисунок 2.4, а) описывается дифференциальным уравнением срабатывания
 (2.18)
(2.18)
где R 0 – активное сопротивление обмотки электромагнита.
Решая уравнение (2.18) относительно I 0 получим экспоненциальную функцию изменения тока Iср = I 0 срабатывания электромагнита
 (2.19)
(2.19)
где Т 0 – постоянная времени обработки электромагнита.
График функции (2.19) представлен на рисунке 2.4,б, из него следует, что время срабатывания не превышает
 . (2.20)
. (2.20)
Процесс возврата (отпускания) якоря электромагнита в исходное состояние описывается дифференциальным уравнением
 (2.21)
(2.21)
Результатом решения уранения (2.21) является экспоненциальная функция отпускания якоря (I 0 = I от)
 (2.22)
(2.22)
представлен на рисунке 2.4, б.
Из уравнения (2.22) и графика I от (рисунок 2.4,б) следует, что время отпускания t от = 3 Т 0 или возврата якоря электромагнита в исходном состоянии можно оценить соотношением (2.20).
Абсолютная погрешность позиционирования якоря электромагнита (рисунок 2.2) в двух устойчивых положениях определяется точностью размещения упоров 1, 2 и может достигать единиц микрон. При этом обеспечивается высокая степень проверяемости результатов дискретного перемещения якоря электромагнита.
Данное свойство электромагнитов наряду с высоким быстродействием, позволяет их эффективно использовать в устройствах позиционирования деталей для гибких производственных систем (ГПС).
Конструкция электромагнита (рисунок 2.2) предусматривает нереверсивное перемещения якоря (независимо от изменения полярности включения катушки электромагнита якорь перемещается в одном направлении).
Однако на практике часто необходимо обеспечить реверсивное (с изменением направления) перемещение якоря электромагнита.
На рисунке 2.5, а представлен один из вариантов конструкции реверсивного (поляризованного) электромагнита дифференциального типа с поступательным (плавным) перемещением якоря.
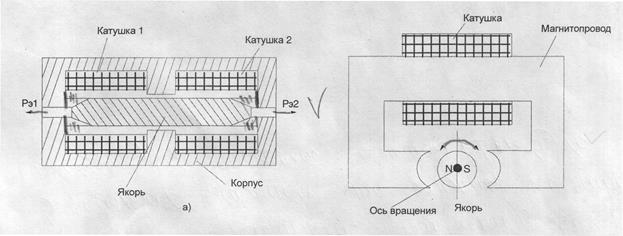
Рисунок 2.5. Конструкции реверсивных (поляризованных)
электромагнитов а) с поступательным движением якоря,
б) с круговым движением якоря
Основное отличие многофункционального электромагнита (рисунок 2.5, а) от нереверсивного (рисунок 2.2) заключается в наличии в нем двух катушек, включенных в дифференциальную схему управления. Таким образом, изменяя разность токов (с учетом знака разности) управления обеими катушками, представляется возможным перемещать якорь в одном из направлений Pэ 1 , Pэ 2 с заданной скоростью. Существенным преимуществом электромагнита (рисунок 2.5) является возможность позиционирования якоря в промежуточных точках данных направлений.
Если необходимо реализовать реверсные круговые движения якоря целесообразно использовать электромагнит, представлений на рисунке 2.5,б. Поляризация (реверсные свойства) здесь осуществляется путем применения постоянного магнита (N, S) который служит в качестве якоря и имеет цилиндрическую форму. Он намагничен по диаметру и располагается в цилиндрической выточке магнитопровода.
Когда ток в катушке отсутствует, постоянный магнит удерживается пружиной в таком положении, что полюсы (N, S) его размещают вертикально. При включении постоянного тока катушки, магнит (якорь) стремится повернуться так, что бы полюсы его расположились горизонтально. В зависимости от направления тока в катушке якорь будет поворачиваться в ту или другую сторону.
Вращающий момент Мэ такого типа электромагнита можно определить по аналогии с тяговым усилием (2.13) линейного электромагнита по формуле:
 (2.23)
(2.23)
где  – производная по углу поворота якоря.
– производная по углу поворота якоря.
Электромагнитные опоры
Актуальной задачей для многих практических применений является обеспечение виброустойчивости технических систем. Например, задача управления жесткостью амортизаторов транспортных средств в соответствии с профилем дорожного покрытия.
Подобно рода задачи могут быть эффективно решены с помощью электромагнитных опор.
На рисунке 6а представлена конструкция соленоидной (с цилиндрической катушкой) электромагнитной опоры. При возбуждении электромагнита (подключении катушки к источнику постоянного тока) из ферромагнитного материала тяговым усилием  перемещается из исходного состояния (координата
перемещается из исходного состояния (координата  ) в вертикальном направлении.
) в вертикальном направлении.
На якорь действует так же механическая сила  (сила тяжести якоря внешнего объекта) которая направлена в противоположном направлении. Статистические характеристики электромагнита
(сила тяжести якоря внешнего объекта) которая направлена в противоположном направлении. Статистические характеристики электромагнита  и противовеса
и противовеса  представлены на рисунке 2.6, б.
представлены на рисунке 2.6, б.
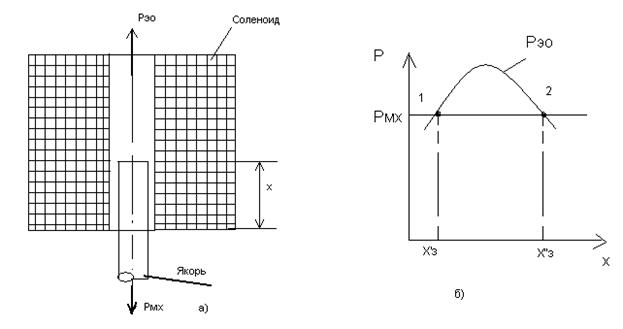
Рисунок 2.6. Статистические характеристики электромагнита
и противовеса
Как видно из рисунка 2.6, б перемещение якоря по оси Х характеризуется двумя точками 1,2 (точками зависания якоря с координатами  и
и  ) при которых
) при которых  .
.
Положение якоря в точке 1 является неустойчивым, поскольку любое его смещение в сторону увеличения координаты  переводит якорь в точку 2. Очевидно точка 2 характеризует устойчивое положение якоря электромагнитной опоры.
переводит якорь в точку 2. Очевидно точка 2 характеризует устойчивое положение якоря электромагнитной опоры.
Изменяя силу тока в катушке электромагнита можно регулировать жесткость фиксирования опоры в данной точке. Для оценки величины справедливо уравнение (2.15).
Принципы электромагнитного уравновешивании силы тяжести технических объектов лежат в основе реализации высокоточных устройств взвешивания и линейных двигателей на магнитной подушке.
Представляют практический интерес магнитные опоры для вращающихся объектов (центрирующие магнитные опоры). Один из вариантов конструкции центрирующие магнитной представлен на рисунке 2.7.
Электромагнит центрующей опоры представляет собой цилиндрический магнитопровод с явно выраженными полюсными.
На полюсных наконечниках размещены катушки электромагнита. Таким образом, в окрестности полюсных наконечников формируется магнитное поле, удерживающее якорь (цилиндрическую ось из магнитомягкого материала) в центре магнитопровода во взвешенном состоянии.
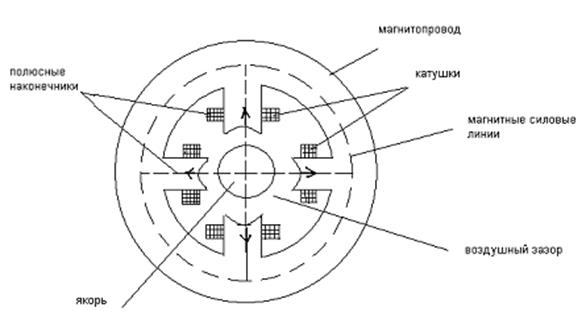
Рисунок 2.7. Центрирующая магнитная опора
Изменяя силу тока в соответствующих катушках можно корректировать (центрировать) местоположение вращающегося якоря.
Между якорем и полюсными наконечниками образуется воздушный зазор, благодаря чему исключаются силы трения вращающегося якоря. Отсутствие сил трения в центрирующей опоре (рисунок 2.7) позволяет исключить использование во вращающихся механизмах ненадежных элементов – подшипников.
Электромагнитные реле
Электромагнитные реле широко применяются в системах автоматизации технологических процессов в качестве элементов управления и защиты исполнительных устройств, а так же в измерительных преобразователях релейного типа. Они предназначены для преобразования маломощных аналоговых сигналов  в электрические сигналы управления большой мощности
в электрические сигналы управления большой мощности  , изменяющихся скачкообразно.
, изменяющихся скачкообразно.
Структурная схема электромагнитных реле представлена на рисунке 2.8.
Электромагнитные реле включают в свою структуру два основных элемента – тяговый электромагнит и контактную группу, которые связаны механически. При подаче входного сигнала ( ) срабатывает электромагнит и происходит механическое перемещение контактов контактной группы, таким образом, осуществляется коммутация выходных сигналов (
) срабатывает электромагнит и происходит механическое перемещение контактов контактной группы, таким образом, осуществляется коммутация выходных сигналов ( ,
,  ,
,  ).
).
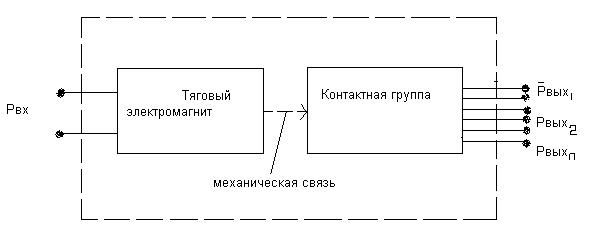
Рисунок 2.8. Структурная схема электромагнитных реле
Классификацию магнитных реле можно представить в виде реле (рисунок 2.9).

Рисунок 2.9. Диаграмма классификации электромагнитных реле
По типу выходного сигнала следует различать электромагнитные реле постоянно тока, переменного тока, универсальные (срабатывающие как от постоянного, так и от переменного тока) и измерительные (предназначенные для реализации электрических и физических величин).
Согласно рисунку 2.9 второй уровень диаграммы предусматривает класссификацию электромагнитных реле по конструктивному признаку контактной группы – негерметизированные контакты и герметизированные контакты. Реле с герметизированными контактами (герконы) часть используется в качестве датчиков электрических и физических величин.
Основным признаком классификации электромагнитных реле на третьем уровне диаграммы (рисунок 2.9) является чувствительность к измерению полярности входного управляющего сигнала постоянного тока.
Реле, у которых направление зависит от полярности выходного сигнала, называют нейтральными. В противном случает реле, реле обладающие чувствительностью к изменению полярности входного сигнала относятся к классу поляризованных электромагнитных реле.
Рисунок 2.10 иллюстрирует конструкции нейтральных и поляризованных реле постоянного тока.
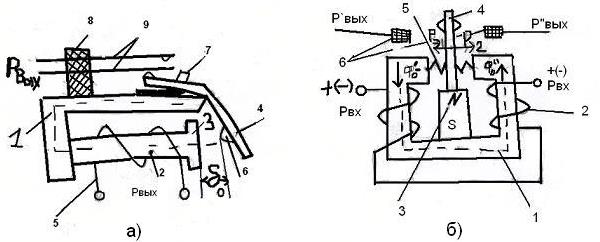
Рисунок 2.10. Конструкции электромагнитных реле постоянного тока
а) нейтральное реле, б) поляризованное реле.
Нейтральное реле постоянного тока (рисунок 2.10, а) состоит из корпуса 1 (магнитопровода), сердечника 2 с полюсным наконечником 3, подвижного якоря 4, обмотки электромагнита 5, штифта отлипания 6, возвратной пружины, изолирующего держателя 8 и контактных пружин 9.
В исходном состоянии под действием возвратной пружины якорь находиться на максимальном удалении от полюсного наконечника (воздушный зазор максимальный). При подаче входного сигнала (постоянного тока) в обмотку электромагнита между полюсным наконечником и якорем возникает разность магнитных потенциалов (формируются разноименные  магнитные полюса) которая создает сила
магнитные полюса) которая создает сила  электромагнитного притяжения, притягивающая якорь к полюсному наконечнику сердечника.
электромагнитного притяжения, притягивающая якорь к полюсному наконечнику сердечника.
Якорь, поворачиваясь относительно корпуса реле изгибает нижнюю контактную пружину и происходит соприкосновение контактов нижней и верхней контактных пружин. Таким образом, формируется выходной сигнал реле. Упругость контактных пружин обеспечивает необходимое контактное давление.
После притяжения якоря к полюсному наконечнику между ними остаётся небольшой воздушный зазор, равен высоте штифта отлипания. Этот зазор увеличивает сопротивление магнитной цепи и уменьшает остаточное намагничивание якоря, что не позволяет ему оставаться пригнутом состоянии при отсутствии  .
.
При якорь под действием возвратной и контактных пружин возвращается в исходное состояние, контакты реле размыкаются ( ).
).
Разновидностью реле постоянного тока является поляризованное реле (рисунок 2.10, б), отличающиеся тем, что перемещения якоря в нем зависит от направления тока в обмотках.
Основными элементами данного типа реле с дифференциальной магнитной системой являются: магнитопровод 1, обмотка электромагнита 2, постоянный магнит 3, якорь с подвижными контактами 4, возвратные пружины 5, неподвижные контакты 6.
При отсутствии входного сигнала (отсутствии тока в обмотках).
Якорь под действием возвратных пружин находится в центральном положении. Усилия  и
и  действующие на якорь от постоянного магнита, равны и противоположны. При подаче тока (
действующие на якорь от постоянного магнита, равны и противоположны. При подаче тока ( ) в обмотку электромагнита образуются магнитны поля
) в обмотку электромагнита образуются магнитны поля  ,
,  соответствующие усилия
соответствующие усилия  . Суммарные усилия в левой части магнитопровода складываются (
. Суммарные усилия в левой части магнитопровода складываются ( ), что приводит к перемещению якоря с подвижным контактом в сторону левого неподвижного контакта и замыкание этих контактов между собой (появление
), что приводит к перемещению якоря с подвижным контактом в сторону левого неподвижного контакта и замыкание этих контактов между собой (появление  ). При изменении полярности входного сигнала направления магнитных полей , меняются на противоположные и соответственно якорь с подвижным контактом перемещается в сторону правого неподвижного контакта (появляется сигнал
). При изменении полярности входного сигнала направления магнитных полей , меняются на противоположные и соответственно якорь с подвижным контактом перемещается в сторону правого неподвижного контакта (появляется сигнал  ).
).
Наличие в структуре поляризованного реле (рисунок 2.10, б) дополнительного источника (постоянного магнита) тяговых усилий на подвижный якорь, способствует существенному по сравнению с нейтральным реле (рисунок 2.10, а) повышению их чувствительности и быстродействию.
Процессы скачкообразного изменения выходных электрических сигналов (Y) реле от входных (Х) характеризуются статическими характеристиками управления представленными на рисунке 2.11.
Статическая характеристика (рисунок 2.11а) отображает процессы переключения нейтрального реле постоянного тока с замыкающими контактами. При изменении входного сигнала от 0 до  реле не изменяет своего состояния. Как только входной сигал Y (напряжение, ток) скачкообразно изменяется от
реле не изменяет своего состояния. Как только входной сигал Y (напряжение, ток) скачкообразно изменяется от  до
до  . Дальнейшее увеличение входного сигнала не изменяет величину выходного сигнала (
. Дальнейшее увеличение входного сигнала не изменяет величину выходного сигнала ( ).
).
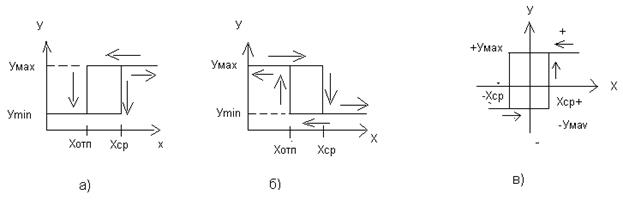
Рисунок 2.11. Статические характеристики управления:
а) – нейтральных реле с замыкающими контактами; б) – нейтральных реле
с замыкающими контактами; в) – поляризованных реле.
При уменьшении входного сигнала  выходной сигнал не изменяется (
выходной сигнал не изменяется ( ) до момента равенства
) до момента равенства  (ток отпускания) после чего выходной сигнал скачкообразно изменится от до .
(ток отпускания) после чего выходной сигнал скачкообразно изменится от до .
Неравенство  принято оценивать коэффициентом возврата
принято оценивать коэффициентом возврата
 , (2.24)
, (2.24)
где  – ток в обмотке реле (ток срабатывания), под действием которого при зазоре
– ток в обмотке реле (ток срабатывания), под действием которого при зазоре  якорь притягивается к сердечнику,
якорь притягивается к сердечнику,  – ток отпускания, действие которого при зазоре
– ток отпускания, действие которого при зазоре 
 не в состоянии создать электромагнитное усилие, удерживающее якорь в притянутом состоянии.
не в состоянии создать электромагнитное усилие, удерживающее якорь в притянутом состоянии.
Коэффициент (2.25) характеризует относительную ширину релейной петли статической характеристики (рисунок 2.11), и чем ближе величина  к 1, тем эффективнее процессы коммутации выходных сигналов реле.
к 1, тем эффективнее процессы коммутации выходных сигналов реле.
Статическая характеристика (рисунок 2.11, б) иллюстрирует процессы коммутации в нейтральных реле постоянного тока с размыкающими контактами.
Отличием реле с характеристикой (рисунок 2.11, б) от реле с характеристикой (рисунок 2.11, а) является инвертирование выходного сигнала Y. Как видно из рисунка 2.11, б при (отсутствие входного сигнала) входной сигнал  , а при
, а при  (наличие входного сигнала) выходной сигнал отсутствует или имеет минимальное значение (
(наличие входного сигнала) выходной сигнал отсутствует или имеет минимальное значение ( ).
).
Статическая характеристика поляризованных реле постоянного тока приведена на рисунке 2.11, в. Основным отличием данной характеристики от характеристик (рисунок 2.11, а, б) является её реверсивный характер – при изменении знака сигнала на входе меняется знак сигнала на выходе, а при реле остается в состоянии, в котором находилось до этого.
На эффективность работы реле большое влияние оказывают тяговые (16) и временные (18, 21) характеристики электромагнита (рисунок 10).
Согласно выражению (2.16), для увеличения силы PЭ электромагнитного притяжения якоря при  необходимо увеличивать (в пределах допустимых конструкций реле) площадь
необходимо увеличивать (в пределах допустимых конструкций реле) площадь  магнитного материала полюсного наконечника электромагнита (рисунок 2.10).
магнитного материала полюсного наконечника электромагнита (рисунок 2.10).
Применительно к электромагнитам соленоидного типа (рисунок 2.5, а) оптимизация (обеспечение равномерности кривой PЭ) связано с использованием полюсных наконечников конической формы (рисунок 2.3,а).
Для надежного срабатывания реле величина PЭ должна быть больше, чем сумма сил  , противодействующих движению якоря (суммы силы, развиваемой возвратной пружиной
, противодействующих движению якоря (суммы силы, развиваемой возвратной пружиной  и силы
и силы  контактного давления). В большинстве случаев на практике в качестве возвратной и контактных пружин используются плоские консольные пружины (рисунок 2.13).
контактного давления). В большинстве случаев на практике в качестве возвратной и контактных пружин используются плоские консольные пружины (рисунок 2.13).
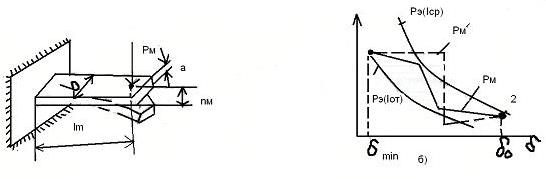
Рисунок 2.12. К оценке механической (а) и тяговых (б) характеристик реле
Механическую силу PM, вызывающую перемещение пружины (рисунок 2.12, а) на величину  в точке ее воздействия можно определить из выражения
в точке ее воздействия можно определить из выражения
 , (2.25)
, (2.25)
где  – параметр жесткости пружины,
– параметр жесткости пружины,  – модуль упругости материала пружины,
– модуль упругости материала пружины,  – момент инерции пружины (рисунок 2.12, а) прямоугольного сечения толщиной a и шириной b,
– момент инерции пружины (рисунок 2.12, а) прямоугольного сечения толщиной a и шириной b,  – длина пружины до точки приложения силы PM.
– длина пружины до точки приложения силы PM.
Из (2.25) очевидно, что PM плоских пружин при условии (a, b, , EМ = const геометрически можно представить прямой линией с заданным углом наклона.
Если в конструкции реле (рисунок 2.10) предусмотрено использование нескольких типов плоских пружин (возвратная пружина, контактные пружины на замыкание и размыкание контактов), то геометрически PM будет представлять собой ломаную линию с тремя отрезками, проходящими под разными углами (рисунок 2.12, б).
Основным условием эффективного функционирования реле является согласование их тяговых PЭ и механических PM характеристик, как показано на рисунке 2.12, б. Из рисунка 2.12, б следует, что тяговые характеристики  для токов срабатывания
для токов срабатывания  и отпускания
и отпускания  , проходя через точки 1, 2, не должны пересекаться с механической характеристикой
, проходя через точки 1, 2, не должны пересекаться с механической характеристикой  в области значений
в области значений  . В противном случае якорь может зависать в промежуточных точках 3, 4 механической характеристики
. В противном случае якорь может зависать в промежуточных точках 3, 4 механической характеристики  (пунктирная линия).
(пунктирная линия).
Быстродействие реле в основном определяется динамическими характеристиками (2.17) – (2.20), (2.22) электромагнита.
Поскольку якорь электромагнита реле имеет сравнительно небольшую массу, входящим в выражение (2.16) параметром tдв можно пренебречь и оценивать быстродействие реле согласно (2.20) как  .
.
На практике принято классифицировать реле на быстродействующие  , нормальные
, нормальные  и замедленные
и замедленные  . При использовании реле в системах автоматического управления возникает необходимость в регулировании их временных характеристик (
. При использовании реле в системах автоматического управления возникает необходимость в регулировании их временных характеристик ( ).
).
Существует конструктивные и схемные методы регулирования реле. К конструктивным методам можно отнести: уменьшение или увеличение массы подвижных элементов реле, изменение упругости возвратной пружины, изменение величины воздушного зазора  , уменьшение или увеличение воздействия на вихревых токов в конструктивных элементах, использование дополнительных обмоток электромагнита.
, уменьшение или увеличение воздействия на вихревых токов в конструктивных элементах, использование дополнительных обмоток электромагнита.
На принципиальных схемах реле обозначаются в виде, представленном на рисунке 2.13, а, где  – условное обозначение электромагнита,
– условное обозначение электромагнита,  – нормально разомкнутые контакты,
– нормально разомкнутые контакты,  – нормально замкнутые контакты,
– нормально замкнутые контакты,
 – переключающиеся контакты.
– переключающиеся контакты.

Рисунок 2.13. Условное обозначение (а) и схемы (б, в, г, д)
регулирования временных характеристик реле
Согласно выражению для постоянной времени  быстродействие реле (уменьшение) можно повысить за счет включения последовательно с обмоткой реле (рисунок 2.13, б) добавочного резистора
быстродействие реле (уменьшение) можно повысить за счет включения последовательно с обмоткой реле (рисунок 2.13, б) добавочного резистора  (
( ). При этом необходимо повысить напряжение
). При этом необходимо повысить напряжение  сети питания реле с целью исключения потери напряжения на .
сети питания реле с целью исключения потери напряжения на .
Еще большее ускорение можно получить при шунтировании емкостью  (рисунок 2.13, в).
(рисунок 2.13, в).
За счет зарядного тока емкости С ток в обмотке реле в момент ее включения быстрее достигает значения . После того, как емкость зарядилась, она не оказывает влияния на работу реле.
Параллельное включение к обмотке реле резистора (рисунок 2.13, г) при низком выходном сопротивлении источника питания не оказывает влияния на  , однако при отключении обмотки реле с индуктивностью
, однако при отключении обмотки реле с индуктивностью  от сети питания возникает ЭДС самоиндукции.
от сети питания возникает ЭДС самоиндукции.
 , (2.26)
, (2.26)
где  – показатель скорости изменения тока I в обмотке реле.
– показатель скорости изменения тока I в обмотке реле.
При замыкании  на (рисунок 2.13, г) в обмотке реле образуется ток и магнитное поле, удерживающее якорь некоторое время после отключения реле от источника питания, тем самым увеличивая
на (рисунок 2.13, г) в обмотке реле образуется ток и магнитное поле, удерживающее якорь некоторое время после отключения реле от источника питания, тем самым увеличивая  . Недостатком данного метода увеличение является потеря мощности на резисторе (резистор постоянно подключен к источнику питания).
. Недостатком данного метода увеличение является потеря мощности на резисторе (резистор постоянно подключен к источнику питания).
Для устранения указанного недостатка необходимо обмотку реле шунтировать диодом, как показано на рисунке 2.13, д. Согласно рисунку 2.13, д диод заперт до момента времени отключения обмотки от и срабатывает (увеличивает ) при выключении реле аналогично шунтирующему обмотку (рисунок 2.13, г) небольшой величины.
Шунтирование обмотки реле емкостью (рисунок 2.14, а) при низком выходном сопротивлении источника питания так же, как в схеме (рисунок 2.13, г), не оказывает влияния на параметр (емкость заряжается мгновенно).
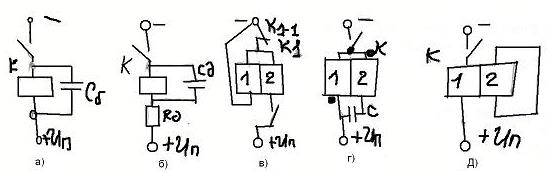
Рисунок 2.14. Схемы регулирования временных характеристик реле.
Однако при выключении реле происходит заряд на обмотку реле (рисунок 2.14, а) с постоянной времени  и соответственно выражению (2.21) увеличению . Если источник имеет относительно большое внутренне сопротивление или последовательно с обмоткой реле включен резистор (рисунок 2.14, б), то данная схема осуществляет с постоянной времени
и соответственно выражению (2.21) увеличению . Если источник имеет относительно большое внутренне сопротивление или последовательно с обмоткой реле включен резистор (рисунок 2.14, б), то данная схема осуществляет с постоянной времени  задержку как , так и .
задержку как , так и .
Большие возможности по регулированию параметров , открывает использование реле с двумя обмотками, в том числе использование дополнительных короткозамкнутых витков (токопроводящих шайб и гильз).
На рисунке 2.14, г представлена схема ускорения срабатывания реле (уменьшения ) за счет использования дополнительной (ускоряющей) обмотки 2, выполненной более толстым проводом, чем основная (рабочая) обмотка 1 и с меньшим, чем у обмотки 1, числом витков.
Обмотка 2 рассчитана на кратковременное протекание больших токов, и она не успевает перегреваться, а другая обмотка 1 рассчитана на длительное подключение к источнику питания  . Через нормально замкнутые контакты
. Через нормально замкнутые контакты  обмотка 2 подключается к источнику питания .
обмотка 2 подключается к источнику питания .
Поскольку ток, протекающий через обмотку 2 в момент включения существенно выше, чем в рабочей обмотке 1, она формирует мощное тяговое усиление  и реле срабатывает за минимальный промежуток времени . После срабатывания реле контакты размыкаются, и обмотки 1, 2 соединяются последовательно, а ток, протекающий через обмотки 1, 2, уменьшается и становится достаточным для удержания коря реле в положении минимального воздушного зазора
и реле срабатывает за минимальный промежуток времени . После срабатывания реле контакты размыкаются, и обмотки 1, 2 соединяются последовательно, а ток, протекающий через обмотки 1, 2, уменьшается и становится достаточным для удержания коря реле в положении минимального воздушного зазора  .
.
На рисунке 2.14, д представлено двухобмоточное реле постоянного тока с включением емкости  последовательно с дополнительной обмоткой 2. Обмотки реле 1, 2 включены встречно. При подключении данного реле к источнику питания в обмотках 1, 2 (в обмотке 2 за счет зарядного тока емкости ) создаются встречно действующие магнитные поля и происходит задержка срабатывания реле (увеличение ). По мере заряда емкости С магнитное поле обмотки 2 ослабляется и реле срабатывает. При отключении реле от источника питания
последовательно с дополнительной обмоткой 2. Обмотки реле 1, 2 включены встречно. При подключении данного реле к источнику питания в обмотках 1, 2 (в обмотке 2 за счет зарядного тока емкости ) создаются встречно действующие магнитные поля и происходит задержка срабатывания реле (увеличение ). По мере заряда емкости С магнитное поле обмотки 2 ослабляется и реле срабатывает. При отключении реле от источника питания  конденсатор С разряжается через обмотки 1, 2 и реле отключается с выдержкой времени .
конденсатор С разряжается через обмотки 1, 2 и реле отключается с выдержкой времени .
Широко используется на практике метод регулирования , с применением короткозамкнутых обмоток (рисунок 2.14, е) или короткозамкнутых витков (различного рода токопроводящих шайб, гильз, каркасов). Их иногда называют методами магнитного демпфирования перемещения якоря реле.
При включении рабочей обмотки 1 реле (рисунок 2.14, е) возникают мгновенные изменения магнитного потока в сердечнике (рисунок 2.10, а). Эти изменения обуславливают в дополнительной короткозамкнутой обмотке (рисунок 2.14, е) ЭДС индукции.
 , (2.27)
, (2.27)
где  – число витков короткозамкнутой обмотки 2,
– число витков короткозамкнутой обмотки 2,  – характеристика скорости изменения магнитного потока в сердечнике реле.
– характеристика скорости изменения магнитного потока в сердечнике реле.
В короткозамкнутой обмотке 2 ЭДС (2.27) создает ток, и следовательно, дополнительный магнитный поток в сердечнике реле, направленный противоположно магнитному потоку рабочей обмотки. Подобного рода реакция дополнительной обмотки 2 на изменение магнитного потока в рабочей обмотке увеличивает . Аналогичные процессы происходят при выключении реле, приводящие к увеличению .
Если короткозамкнутый виток в виде шайбы из токопроводящего материала находится на полюсном наконечнике реле (рисунок 2.10, а), то при изменении магнитного потока в сердечнике (включение или выключение реле) в токопроводящей шайбе наводится ЭДС (2.27). Данная ЭДС образует дополнительное магнитное поле, которое при включении реле отталкивает якорь от полюсного наконечника (увеличивает ), а при его выключении некоторое время удерживает якорь в положении минимального воздушного зазора (увеличивает ).
Число витков рабочей обмотки можно определить исходя из заданных тока срабатывания реле и намагничивающей силы  сердечника
сердечника
 . (2.28)
. (2.28)
В электрических расчетах часто используется параметр  (активное сопротивление обмотки реле), которое определяется выражением
(активное сопротивление обмотки реле), которое определяется выражением
 , (2.29)
, (2.29)
где  – удельное электрическое сопротивление провода обмотки;
– удельное электрическое сопротивление провода обмотки;
 – длина общего провода обмотки; – средняя длинна одного провода; q – площадь сечения провода.
– длина общего провода обмотки; – средняя длинна одного провода; q – площадь сечения провода.
Индуктивное сопротивление рабочей обмотки реле переменного тока с частотой питания f можно определить из выражения
 , (2.30)
, (2.30)
где  – круговая частота;
– круговая частота;  – индуктивность рабочей обмотки;
– индуктивность рабочей обмотки;
 – магнитное сопротивление сердечника.
– магнитное сопротивление сердечника.
Чувствительность реле обычно принято оценивать параметром  (мощность срабатывания реле)
(мощность срабатывания реле)
 . (2.31)
. (2.31)
На надежность и долговечность реле большое влияние оказывают конструктивные и электрические параметры их контактной группы. К контактам реле предъявляются требования обеспечения надежности электрического соединения, долговечности и стойкости их к влиянию внешней среды.
Конструктивные особенности распространенных в настоящие время контактов реле представлены на рисунке 2.15.
В начальный момент соприкосновение контактов из-за наличия оксидной пленки шероховатости и различных дефектов их поверхности, переходное контактное сопротивление  велико (площадь соприкосновения контактов минимальна). По мере увеличения силы, сдавливающей контакты
велико (площадь соприкосновения контактов минимальна). По мере увеличения силы, сдавливающей контакты  (контактного давления) происходит продавливание оксидной плёнки и сглаживание неровностей металла, в результате чего увеличивается площадь соприкосновения контактов и существенно уменьшается
(контактного давления) происходит продавливание оксидной плёнки и сглаживание неровностей металла, в результате чего увеличивается площадь соприкосновения контактов и существенно уменьшается
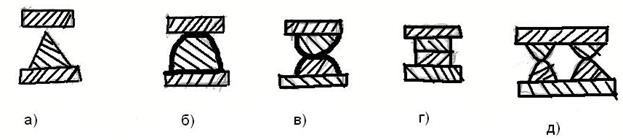
Рисунок 2.15. Конструктивные особенности контактов реле:
а – плоско-конические контакты, б – плоско-сферические контакты,
в – плоские контакты, г – двойные контакты.
Для оценки контактного сопротивления можно воспользоваться следующим выражением
 , (2.32)
, (2.32)
где a – коэффициент характеризующий материал контактов, чистоту обработки контактной поверхности и степень ее окисления
(для серебра  ); b – коэффициент формы контактов для плоских контактов (рисунок 2.15, г
); b – коэффициент формы контактов для плоских контактов (рисунок 2.15, г  , для точеных контактов (рисунок 2.15, а)
, для точеных контактов (рисунок 2.15, а)  }.
}.
Наиболее тяжелый режим работы контактов является разрыв цепи нагрузки.
При размыкании контактов увеличивается и соответственно выделяется большое количество тепла на контактном переходе. В результате интенсивного локального (точечного) нагревания образуется мостик из расплавленного металла, который разрывается вблизи одного контакта и происходит перенос металла с одного контакта на другой (особенно при разрыве цепи постоянного тока).
Одновременно между разомкнутыми контактами ионизируется воздушный зазор и вследствие чего возникает электрическая дуга или искра. Данное обстоятельство приводит к интенсивному окислению и обгоранию контактов. На процессы образования искры (дуги) большое влияние оказывает параметры цепи, которую размыкают контакты и наличие в цепи источника питания постоянного или переменного тока.
Чем больше значение имеет индуктивность в цепи нагрузки и чем меньше её активное сопротивление, тем больше согласно (2.26) ЭДС индукции на размыкании контактов и соответственно токи размыкания нагрузки, а следовательно больше интенсивность дуги.
При размыкании контактов на переменном в момент прохождения тока через нуль дуга обрывается. Поэтому контакты на переменном токе могут разрываться в 3, 4 раза большую мощность чем на постоянном токе.
В настоящее время ля дугогашения (искрогашения) используют следующие основные методы:
- дугогашение с помощью электромагнитов или магнитов (с помощью с помощью магнитного поля дуга вытесняется из воздушно зазора между контактами);
- применение тугоплавких металлов и сплавов в качестве материалов контактов (металлокерамики, вольфрама и его сплавов);
- увеличение расстояний между контактами;
- размещение контактов в масле, где образование дуги затруднено из-за отсутствия кислорода;
- применение дугогасящих дополнительных контактов из вольфрама и схем дугогашения.
В связи с тем, что при замыкании цепи нагрузки, содержащей индуктивность возникает ЭДС самоиндукции (2.26) превышающие изменение тока ( ).
).
На рисунке 2.16 представлена схема дугогашения (искрогашения), содержащая цепочку элементов  , шунтирующих либо индуктивную нагрузку (рисунок 2.16,а), либо контакты реле (рисунок 2.16, б).
, шунтирующих либо индуктивную нагрузку (рисунок 2.16,а), либо контакты реле (рисунок 2.16, б).
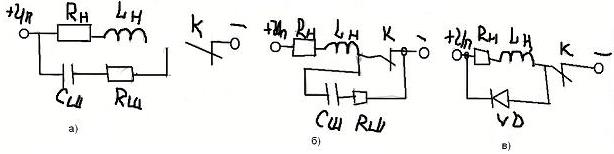
Рисунок 2.16. Схемы дугогашения контактов реле.
Цепочка , включенная параллельно нагрузке  (рисунок 2.16, а) или контакту К (рисунок 2.19,б) уменьшает напряжение на контакте за счет того, что энергия, выделяемая на индуктивности расходуется на заряд конденсатора
(рисунок 2.16, а) или контакту К (рисунок 2.19,б) уменьшает напряжение на контакте за счет того, что энергия, выделяемая на индуктивности расходуется на заряд конденсатора  . Таким образом максимальное напряжение на конденсаторе возникает с некоторой задержкой времени и контакты К успевают разойтись на расстояние при котором дуга не возникает (с увеличением расстояния между контактами увеличивается допустимое пробивное напряжение).
. Таким образом максимальное напряжение на конденсаторе возникает с некоторой задержкой времени и контакты К успевают разойтись на расстояние при котором дуга не возникает (с увеличением расстояния между контактами увеличивается допустимое пробивное напряжение).
Резистор  включенный последовательно с конденсатором, необходим для ограничения тока разряда конденсатора при повторном замыкании контакта.
включенный последовательно с конденсатором, необходим для ограничения тока разряда конденсатора при повторном замыкании контакта.
Схема дугогашения (рисунок 2.16, в) с шунтирующим диодом VD работает аналогично схемам (рисунок 2.16, а, б). В начальный момент времени (контакт К замкнут) диод VD заперт. При замыкании контакта К ЭДС самоиндукции  (2.27) меняет полярность, диод VD открывается и шунтирует с внутренним сопротивление близким к нулю.
(2.27) меняет полярность, диод VD открывается и шунтирует с внутренним сопротивление близким к нулю.
Для коммутации мощной нагрузки (электромагнитов и электрических двигателей) часто используются реле переменного тока. Если реле постоянного тока (рисунок 2.10) включить в сеть переменного тока с частотой 50 Гц, то возникнет вибрация якоря (пульсация тягового усилия) с частотой 100 Гц (ток в обмотке реле два раза за период переходит через ноль).
Подобного рода не допустима, так как резко снижается надежность реле (изнашиваются и подгорают контакты). Очевидно для устранения вибрации, в конструкции реле переменного тока необходимо предусмотреть наличие двух магнитных потоков  сдвинутых один от другого по фазе на угол
сдвинутых один от другого по фазе на угол  .
.
Из выражения (2.16) следует, что тяговое усилие

