




Содержание группового занятия
Введение
Совокупность бортовых устройств, обеспечивающих управление движением самолета и управление различными агрегатами и частями самолета, называют системой управления самолетом. Система управления самолетом может быть неавтоматической, полуавтоматической или автоматической. Если процесс управления осуществляется непосредственно летчиком, т. е. летчик посредством мускульной силы приводит в действие органы управления и устройства, обеспечивающие создание и изменение управляющих движением самолета сил и моментов, то система управления называется неавтоматической (прямое управление самолетом). Если процесс управления осуществляется летчиком через механизмы и устройства, облегчающие и улучшающие качество процесса управления, то система управления называется полуавтоматической. Если создание и изменение управляющих сил и моментов осуществляется комплексом автоматических устройств, а роль летчика сводится к контролю за ними, то система управления называется автоматической. На большинстве современных скоростных самолетов применяются полуавтоматические и автоматические системы управления.
От правильной работы топливной системы зависят возможность выполнения боевого задания и безопасность полета. На современных самолетах запасы топлива (авиационного керосина) могут составлять от 20 до 50% взлетной массы самолета. Для размещения топлива используют объемы крыла, фюзеляжа и подвесные баки. На пассажирских, транспортных самолетах и бомбардировщиках топливо размещают в крыле и этим освобождают фюзеляж для полезной нагрузки.
Вопрос № 1. Общая характеристика и состав системы управления самолетом
Комплекс бортовых систем и устройств, которые дают возможность летчику приводить в действие органы управления самолетом для изменения режима полета или для балансировки самолета на заданном режиме, называют основным управлением самолета. Устройства, обеспечивающие управление различными агрегатами и частями самолета (шасси, закрылками, створками), называют вспомогательным управлением.
В систему основного управления входят:
а) командные рычаги, на которые непосредственно воздействует летчик, прикладывая к ним усилия и перемещая их;
б) проводка управления, соединяющая командные рычаги с управляемыми агрегатами;
в) специальные механизмы, автоматические и исполнительные устройства.
Летчик является важнейшим звеном в неавтоматической и полуавтоматической системах управления. Он воспринимает и перерабатывает информацию о положении самолета, действующих перегрузках, положениях рулей, вырабатывает решение и создает управляющее воздействие на командные рычаги. Поэтому ряд специальных требований к основному управлению учитывает возможности и особенности работы летчика, как звена этой системы.
Упрощенная схема многорежимной системы управления для одного канала (тангажа) дана на рис. 1.

Рис. 1. Принципиальная схема системы управления: КРУ—командные рычаги управления; АРУ — автомат регулирования управления; РАУ — рулевой агрегат управления; РП — рулевой привод; ББ — блок безопасности; РМ — рулевая машина; КПП — командно-пилотажный прибор; НПП — навигационно-пилотажный прибор
В режиме ручного управления летчик, зная заданные параметры движения, сравнивает их с показаниями соответствующих приборов (указателей положения самолета) и в зависимости от величины, знака и количества сигналов рассогласования, перемещая командные рычаги управления (КРУ), отклоняет рули. На больших по массе и размерам и на сверхзвуковых самолетах непосредственное отклонение рулей осуществляет рулевой привод. (РП), а летчик фактически управляет этим РП, так как прямое отклонение рулей требует очень больших затрат энергии.
Об эффективности управляющего воздействия летчик судит по усилиям, которые он прикладывает к командным рычагам, и по перемещениям этих рычагов. Особо важное значение для летчика имеют две характеристики:  — приращение тянущего усилия на ручке управления и
— приращение тянущего усилия на ручке управления и  — приращение хода ручки, потребные для увеличения нормальной перегрузки на единицу. При очень малых усилиях ( менее 10 Н на единицу перегрузки) и перемещениях летчику трудно дозировать управляющие воздействия, что и приводит, как правило, к раскачке самолета. При больших перемещениях ручки управление становится вялым и тяжелым. Важное значение имеет также характер изменения балансировочных усилий по режимам полета.
— приращение хода ручки, потребные для увеличения нормальной перегрузки на единицу. При очень малых усилиях ( менее 10 Н на единицу перегрузки) и перемещениях летчику трудно дозировать управляющие воздействия, что и приводит, как правило, к раскачке самолета. При больших перемещениях ручки управление становится вялым и тяжелым. Важное значение имеет также характер изменения балансировочных усилий по режимам полета.
Оптимальные усилия и перемещения, обеспечивающие необходимую управляемость самолета, формирует специальный автомат регулирования управления (АРУ) в зависимости от режима полета.
Не менее важное значение, чем усилия и перемещения, имеет для летчика реакция самолета на отклонение рулей. На некоторых режимах полета самолеты обладают повышенной колебательностью, она проявляется в том, что переход на новый режим полета (например, на другой угол тангажа) сопровождается колебаниями самолета около этого нового режима. Попытка летчика погасить колебания может привести к раскачке самолета. Поэтому демпфирование угловых колебаний самолета по углу тангажа осуществляет специальный автомат демпфирования, который через раздвижную тягу (агрегат) управления (РАУ) и РП отклоняет рули на уменьшение угловой скорости вращения самолета.
Таким образом, ручное управление оказывается автоматизированным. При отклонении ручки управления и работе демпфера руль отклоняется одновременно и летчиком, и демпфером. Сигнал демпфера на РАУ и отклонение рулей вырабатываются в вычислителе.
В режиме автоматического управления вычислитель, получая информацию о заданных и текущих параметрах движения, вырабатывает потребный сигнал управления и подает его на рулевую машину (РМ), которая через РП отклоняет рули. Сигнал управления вырабатывается в соответствии с определенным законом управления в вычислителе и контролируется блоком безопасности (ББ), который ограничивает сигнал по условиям безопасности полета.
Одновременно вычислитель выдает командные сигналы на директорные приборы — навигационно-пилотажный (НПП) и командно-пилотажный (КПП). Если система автоматического управления работает исправно, то стрелки КПП находятся в нейтральном положении. Длительное отклонение стрелок от нейтрального положения говорит о неисправности системы.
Командные рычаги системы управления устанавливаются в кабине летчика и включают ручное управление (ручку или штурвал с колонкой) и ножное (педали).
На рис. 2 показаны кинематические схемы рычагов ручного управления.

Рис. 2.
Рис. 2. Варианты кинематических схем приводов ручного управления: 0 — ось вращения ручки; 1—ручка управления; 2—тяга управления по тангажу; 3—шарнирное звено, обеспечивающее возможность поворота наконечника тяги; 4—тяга управления по крену; 5—ось-кронштейн установки ручки
На рис. 3(а) показана типовая конструкция ручки управления самолетом.
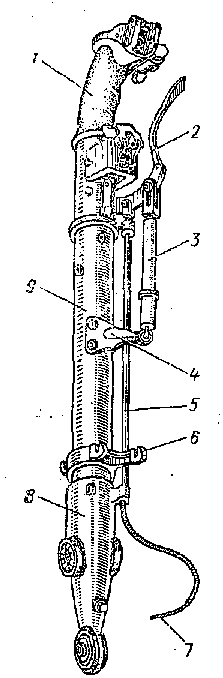

Рис. 3. Типовые конструкции ручки (а) и штурвала (б) управления самолетом: а) 1—стандартная рукоятка; 2—рычаг торможения колес шасси; 3 — возвратная пружина управления тормозами; 4—кронштейн; 5—трубка проводки к тормозам колес; 6—хомут с крючком фиксатора ручки при стоянке; 7 — трос; 8—нижний стакан; 9 — труба б) 1—секторная качалка; 2, 5—опоры; 3—качалка; 4—рычаг управления рулем высоты; 6—колено; 7—труба; 5—переключатель управления триммерами руля высоты; 9—кнопка быстрого отключения автопилота; 10—штурвал; 11—головка; 12—кнопка самолетного переговорного устройства (СПУ); 13—кнопка включения радиостанции; 14—гашетка.
Штурвал с колонкойприменяется на тяжелых неманевренных самолетах (рис. 3б). Он выполняет те же функции, что и ручка управления. При наклоне колонки вперед или назад обеспечивается продольное управление самолетом, а при вращении штурвала вправо или влево поперечное управление самолетом.
На ручке и штурвале часто крепятся рычаги и кнопки управления различными агрегатами, например, тормозами колес, тормозными щитками, вооружением, радио и другими устройствами. Иногда для освобождения пространства в кабине и повышения удобства колонки штурвального управления располагают горизонтально и пропускают их через приборную доску.
Педалиножного управленияслужат для управления рулем поворота. Они выполняются в виде рычажно-параллелограммного механизма (рис. 4) или качающихся педалей. Параллелограммный механизм обеспечивает поступательное перемещение педалей без их разворота.
Педали должны регулироваться по росту летчика.

Рис. 4. Рычажно-параллелограммный механизм ножного управления:
1—основной рычаг; 2—ремешок крепления ног летчика; 3—поступательно движущаяся педаль; 4—тяга подсоединения проводки управления; 5—рычаг параллелограммного механизма
Вывод: всё большее внимание привлекают сейчас электродистанционные системы управления, так как в таких системах можно получить более высокие точностные характеристики передаваемых управляющих сигналов, чем в механической проводке, а многие автоматические и вычислительные устройства для своей работы уже давно используют электрические сигналы. В таких системах значительно проще решаются такие сложные вопросы, как обеспечение соответствия взаимных деформаций конструкции планера и проводки управления, борьба с трением в проводке управления, с люфтами и т.д. Однако рассмотренная выше механическая проводка управления, по-видимому, ещё долго будет использоваться как резервная для обеспечения необходимого высокого уровня безопасности полётов.

