




ЛЕКЦИЯ №13. ГИРОСКОПИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
Особое место в семействе ИУ современных ВС играют гироскопические системы и датчики, т.е. системы и датчики основной частью которых является гироскоп.[1]
Под гироскопом понимается техническое устройство представляющее собой быстро вращающееся тело – ротор гироскопа[2] с рамками подвеса.
Различают гироскопы с двумя степенями свободы – двухстепенные и тремя степенями свободы – трехстепенные.
С помощью гироскопических ИУ определяют направление меридиана и истиной вертикали, измеряют угловые скорости и ускорения, а также линейную скорость движения различных объектов и координаты места их расположения. Такое широкое распространение гироскопические ИУ устройства нашли благодаря своим основным свойствам:
- основным свойством трехстепенного гироскопа является свойство сохранять неизменным направление своей главной оси в МИРОВОМ пространстве;
- основным свойством двухстепенного гироскопа является свойство совмещать по кратчайшему пути вектор собственного вращения гироскопа с вектором вынужденного вращения – свойство прецессии.
Общие сведения о гироскопе
Действие ряда гироскопических ИУ основано на применении гироскопов с двумя степенями свободы. К таким гироскопическим ИУ относятся: двухстепенные гироскопы силовых стабилизаторов, датчики угловой скорости и интегрирующие гироскопы, а также вибрационные (тахометрические) гироскопы с двумя степенями свободы.
Гироскоп состоит из ротора, рамки и основания (корпуса), которое условно можно принять за корпус самолета. Ротор гироскопа имеет две степени свободы движения относительно основания: вращение ротора вокруг боковой оси ВС относительно рамкис собственной угловой скоростью dφ/dt; вращение вместе с рамкой вокруг продольной оси ВС относительно основания с угловой скоростью dβ/dt.
При этом вертикальная ось ВС должна быть направлена перпендикулярно плоскости, заключающей оси продольную и боковую так, чтобы трехгранник xyz был правым.
Датчики угла и угловой скорости (ДУС)
Для ручного и автоматического управления летательными аппаратами, помимо определения их углового положения, необходимо измерять угловые скорости вращения относительно осей летательных аппаратов. С этой целью широкое применение находят гироскопические измерители угловой скорости – скоростные гироскопы (СГ).
Датчики угловых скоростей (ДУС), предназначенные для измерения угловой скорости вращения ВС вокруг какой-либо из связанных его осей, применяются в качестве чувствительных элементов автопилотов, а также бескарданных систем ориентации и бескарданных инерциальных навигационных систем.
В основу принципа действия ДУС положено основное свойство двухстепенного гироскопа (свойство прецессии) – совмещать главную ось собственного вращения гироскопа с осью вынужденного вращения.
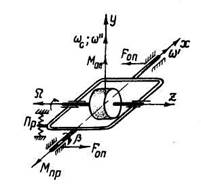 Скоростной гироскоп имеет две степени свободы, одна из которых – степень свободы рамки – имеет упругое ограничение в виде противодействующей пружины (рис. 13.1). Если гироскоп ориентирован относительно осей самолета и самолет начинает разворачиваться с угловой скоростью, вектор которой ωс перпендикулярен плоскости рамки, то поскольку гироскоп стремится сохранить неизменным положение оси ротора, опоры рамки, вращаясь вместе с самолетом, будут воздействовать на ось рамки с силами FОП. Таким образом, возникнет момент МОП пары сил FOП, вектор которого направлен, как и ωс по оси у.
Скоростной гироскоп имеет две степени свободы, одна из которых – степень свободы рамки – имеет упругое ограничение в виде противодействующей пружины (рис. 13.1). Если гироскоп ориентирован относительно осей самолета и самолет начинает разворачиваться с угловой скоростью, вектор которой ωс перпендикулярен плоскости рамки, то поскольку гироскоп стремится сохранить неизменным положение оси ротора, опоры рамки, вращаясь вместе с самолетом, будут воздействовать на ось рамки с силами FОП. Таким образом, возникнет момент МОП пары сил FOП, вектор которого направлен, как и ωс по оси у.
 Этот момент вызовет прецессию с угловой скоростью ω' вокруг оси х рамки, что приведет к деформации противодействующей; пружины Пр. Возникнет момент пружины МПР, вектор которого будет направлен противоположно ω'. Под действием МПР гироскоп станет прецессировать с угловой скоростью ω'', вектор которой параллелен направлению вектора вращения самолета ωс. Таким образом, установившееся значениеугла поворота рамки будет пропорционально измеряемой угловой скорости.
Этот момент вызовет прецессию с угловой скоростью ω' вокруг оси х рамки, что приведет к деформации противодействующей; пружины Пр. Возникнет момент пружины МПР, вектор которого будет направлен противоположно ω'. Под действием МПР гироскоп станет прецессировать с угловой скоростью ω'', вектор которой параллелен направлению вектора вращения самолета ωс. Таким образом, установившееся значениеугла поворота рамки будет пропорционально измеряемой угловой скорости.
К основным погрешностям ДУС относятся:
- погрешность, вносимая наклоном измерительной оси у;
- погрешность, порождаемая моментом сил “сухого” трения в подшипниках;
- погрешность, вызываемая нестабильностью характеристик элементов ИУ (определяется конструкцией ИУ и условиями его работы);
- погрешность, вызываемая несбалансированностью гироузла;
- погрешность от динамической несбалансированности гиромотора.
Гирополукомпасы
Гирополукомпас представляет собой трехстепенной гироскоп с вертикальной осью внешней рамки, ось ротора которого удерживается в горизонтальной плоскости системой коррекции. Работа ИУ основана на использовании только инерционных свойств гироскопа, и не имеется никаких устройств, устраняющих возникающие отклонения оси ротора в азимуте (т.е. в горизонтальной плоскости) от первоначального заданного направления. Именно поэтому такое устройство и получило название гирополукомпаса (ГПК).
 |
Ось ротора гироскопа, стремясь сохранить неизменное положение относительно МИРОВОГО пространства, будет отклоняться от начального положения в азимуте из-за вращения Земли. Так как ротор ГПК по условию удерживается в горизонтальной плоскости, отклонение в какой-либо точке Земли М на широте φ (рис. 13.2) будет обусловливаться вертикальной составляющей ωЗВ = ω3·sinφ угловой скорости ω3 вращения Земли. При этом относительно Земли гироскоп будет вращаться с угловой скоростью – ωЗВ.
Если приложить к гироскопу корректирующий момент, обеспечивающий прецессию со скоростью ωЗВ, то ось ротора станет неподвижной относительно Земли. Следовательно, направление этой оси может служить началом отсчета курса.
Гирополукомпасы с подобной компенсацией уходов в азимуте из-за вращения Земли применяются для измерения ортодромического курса и полетов по ортодромии.
Гирополукомпасы применяются как самостоятельные курсовые ИУ, а также служат гироскопическими датчиками курса в курсовых системах и автопилотах.
[1] Термин “гироскоп” получен от греческих слов “гирос” – вращение и “скорпео” – наблюдаю.
[2] Ротор гироскопа вращается со скоростью от 22000 об/мин. и более.

