




¬—“”ѕ
ќсновна спр€мован≥сть методичних вказ≥вок з предмету ф≥зика - дати можлив≥сть студентам за допомогою досл≥ду вивчити важлив≥ ф≥зичн≥ €вища. ќпис лабораторних роб≥т не претендуЇ на те, щоб створити у студент≥в повне у€вленн€ про €вища, €к≥ вивчаютьс€. “аке у€вленн€ може виникнути лише внасл≥док опрацюванн€ лекц≥й та п≥дручник≥в.
¬елика увага в методичних вказ≥вках з ф≥зики дл€ студент≥в техн≥чних спец≥альностей прид≥л€Їтьс€ обробленню результат≥в вим≥рюванн€. ƒл€ усп≥шного виконанн€ роб≥т необх≥дна попередн€ самост≥йна п≥дготовка, в першу чергу теоретична.
ожна лабораторна ро≠бота розрахована на дв≥ академ≥чн≥ години зан€ть у лаборатор≥њ. ѕеред зан€тт€м студент повинен п≥дготувати протокол ла≠бораторноњ роботи, вивчивши в≥дпов≥дний теоретичний матер≥≠ал.
ѕ≥д час зан€тт€ студенти провод€ть необх≥дн≥ вим≥ри, виконують розрахунки, довод€ть зв≥т до висновку. –езультати вим≥рюванн€ обговорюютьс€ з викладачем ≥ затверджуютьс€.
ѕовн≥стю оформлений зв≥т по лабораторн≥й робот≥ потр≥бно подати виклада≠чу до к≥нц€ зан€тт€. ¬≥н повинен м≥стити: титульну стор≥нку, номер лаборато≠рноњ роботи та њњ назву, перел≥к прилад≥в ≥ приладд€, мету робо≠ти, схему установки, розрахунков≥ формули, таблицю результа≠т≥в вим≥р≥в ≥ розрахунки, висновки за результатами роботи. √раф≥ки повинн≥ бути виконан≥ на м≥≠л≥метровому папер≥.
якщо студент не встигаЇ захистити лабораторну роботу до к≥нц€ зан€тт€, дозвол€Їтьс€ оформити зв≥т (граф≥ки) з використанн€м компТютерних програм (Excel, Origin) до наступного зан€тт€.
Ћабораторна робота вважаЇтьс€ виконаною п≥сл€ усп≥шно проведеного захисту шл€хом сп≥вбес≥ди студента з викладачем (захист зв≥ту + оц≥нка за теоретичний матер≥ал).
«ахист зв≥ту: мета роботи + експериментальна методика + висновки.
“еоретичний матер≥ал: знанн€ ф≥зичних €вищ, €к≥ вивчалис€ у дан≥й лабораторн≥й робот≥ (закони, формули).
INTRODUCTION
Basic goal of the laboratory work manual on Physics is to enable students to learn important physical phenomena by experience. Laboratory work description does not try to give students a complete picture of the studied phenomena. Such presentation can only be achieved as a result of study of lectures and textbooks.
Large attention in the laboratory work manual on Physics for the students of technical professions is devoted to the handling of the measured results. Prior independent preparation, above all theoretical, is needed for successful completion of the work.
Every laboratory work is supposed to take two academic hours. Before the class a student must prepare a protocol of laboratory work and learn appropriate theoretical material.
During the class students do the necessary measurements, execute calculations and take the report to the conclusion. Measured results are discussed with a teacher and confirmed.
Fully designed report on laboratory work should be given to the teacher before the end of the class. It must include: title sheet, laboratory work number and name, list of devices and installations, purpose of work, drawing of the setting, calculation formulae, table of the measurement results and calculations, conclusions, as the result of the work. Graphs must be done on a millimeter`s paper.
|
|
|
If a student does not have time to support the laboratory work before the end of the class, he/she is allowed to design a report (graph) with the use of the computer programs (Excel, Origin) for the next class.
Laboratory work is considered done after the successful speech in support in front of a teacher (report explanation + mark for theoretical material).
Support of report: purpose of work + experimental method + conclusions.
Theoretical material: knowledge of the physical phenomena, which was studied in this laboratory work (laws, formulas).
ЋјЅќ–ј“ќ–Ќј –ќЅќ“ј є 41
ѕ–”∆»ЌЌ»… ћјя“Ќ»
ћета роботи: вивченн€ закон≥в коливанн€ пружинного ма€тника.
«авданн€: а) визначити прискоренн€ в≥льного пад≥нн€;
 б) експериментально перев≥рити теоретичну формулу пер≥оду коливанн€ пружинного ма€тника.
б) експериментально перев≥рити теоретичну формулу пер≥оду коливанн€ пружинного ма€тника.
ѕрилади ≥ обладнанн€: пружина, комплект т€гарц≥в, секундом≥р, л≥н≥йка.
≈кспериментальна установка (рис.1.1) складаЇтьс€ ≥з кронштейна 1, на €кому закр≥плена пружина 2 з державкою 4 та т€гарц≥в 3. ƒеформац≥€ пружини вим≥рюЇтьс€ л≥н≥йкою 5, а час коливань ма€тника Ц секундом≥ром 6.
“еоретична частина
ѕружинний ма€тник (рис.1.2) Ц це т≥ло п≥дв≥шене на пружин≥. ѕри виведенн≥ його ≥з положенн€ р≥вноваги xo на в≥дстань x виникаЇ сила пружност≥ F, €ка за законом √ука дор≥внюЇ F = -kx, де k Ц жорстк≥сть пружини. ÷€ сила надаЇ т≥лу прискоренн€
 , або
, або  . (1.1)
. (1.1)
–≥вн€нн€ (1.1) запишемо так
 . (1.2)
. (1.2)
ѕозначивши  , одержуЇмо
, одержуЇмо
 . (1.3)
. (1.3)
 –≥вн€нн€ (1.3) називаЇтьс€ диференц≥альним р≥вн€нн€м незатухаючих в≥льних гармон≥чних коливань. –озвТ€зком цього р≥вн€нн€ Ї гармон≥чна функц≥€
–≥вн€нн€ (1.3) називаЇтьс€ диференц≥альним р≥вн€нн€м незатухаючих в≥льних гармон≥чних коливань. –озвТ€зком цього р≥вн€нн€ Ї гармон≥чна функц≥€
 , або
, або
 , (1.4)
, (1.4)
€ка задаЇ координату х т€гарц€ в будь-€кий момент часу t.
–озгл€немо характеристики гармон≥чних коливань.
јмпл≥туда јо Ц найб≥льше в≥дхиленн€ точки в≥д положенн€ р≥вноваги,
÷икл≥чна частота коливань  Ц (1.5)
Ц (1.5)
це к≥льк≥сть коливань за 2π секунд.
ѕер≥од коливань  Ц (1.6)
Ц (1.6)
це час одного повного коливанн€, або час, за €кий фаза коливанн€ зм≥нюЇтьс€ на 2π.
„астота коливань  Ц (1.7)
Ц (1.7)
це к≥льк≥сть коливань за 1 секунду.
≤з (1.5) ≥ (1.6) отримуЇмо пер≥од коливань пружинного ма€тника
 . (1.8)
. (1.8)
оли на пружин≥ висить т€гарець, €кий не зд≥йснюЇ коливань, в≥н деформуЇ пружину на величину хо. «а законом √ука F = mg = kxo, можна знайти жорстк≥сть пружини  . (1.9)
. (1.9)
“од≥ формула (1.8)дл€ пер≥оду коливань набуваЇ виду
 (1.10), або
(1.10), або  . (1.11)
. (1.11)
“аким чином, експериментально вим≥рюючи пер≥од коливань “ ≥ видовженн€ пружини хо,в≥д њњ недеформованого стану до положенн€ р≥вноваги при р≥зних навантаженн€х, можна по куту нахилу граф≥ка “2 = f(xo) (див. формулу 1.11) знайти прискоренн€ в≥льного пад≥нн€. “ак виконуЇтьс€ перше завданн€.
ƒруге завданн€ роботи виконуЇтьс€ на основ≥ формули (1.8), тобто перев≥р€Їтьс€ л≥н≥йн≥сть залежност≥  .
.
ѕрактична частина
1. «н€ти з пружини державку т€гарц≥в ≥ в≥дм≥тити по л≥н≥йц≥ положенн€ к≥нц€ пружини (точки п≥дв≥су державки).
2. ѕ≥дв≥сити державку ≥, комб≥нуючи набором т€гарц≥в, зм≥нювати загальну масу m пружинного ма€тника в≥д найменшоњ (одна державка) до найб≥льшоњ (п≥дв≥шен≥ ус≥ т€гарц≥). ћаса державки 11 г, маси т€гарц≥в вказа≠н≥ на них.
|
|
|
3. « вибраною масою m вим≥р€ти деформац≥ю хо пружини до положенн€ р≥вноваги, а пот≥м, надавши невеликоњ ампл≥туди (2÷3 см), вим≥р€ти секундом≥ром час 20 коливань. –езультати вим≥р≥в занести в таблицю 1.1. ≥льк≥сть комб≥нац≥й мас повинна бути не меншою 9÷10.
“аблиц€ 1.1
| є | m кг | Xo см | t с | T с | “2 с2 |  кг0,5
кг0,5
|  Ќ/м
Ќ/м
| kсер Ќ/м |
| - | ||||||||
| - |
4. «а резуль≠та≠тами кожного досл≥ду розрахувати жорстк≥сть пружини k за формулою (1.9) ≥ знайти њњ середнЇ значенн€.
5. ѕобудувати граф≥ки: 1) “2 = f(xo); 2) 
Ќа пр€мол≥н≥йних частинах граф≥к≥в (рис.1.3) вибрати по дв≥ точки 1-2 ≥ 3-4, визначити њх координати по маштабованим ос€м, але не ≥з таблиц≥, ≥ за формулами (1.12) та (1.13) розрахувати g ≥ k.
 |
 (1.12)
(1.12)  (1.13)
(1.13)
6. «робити висновок, пор≥вн€вши значенн€ g з табличним, а k, одержане за формулою (1.13), з середн≥м значенн€м, знайденим за формулою (1.9). ” висновку також в≥дм≥тити чи л≥≠н≥йн≥ граф≥ки одержано у досл≥дах ≥ €кщо так, то про що це св≥дчить?
онтрольн≥ запитанн€
1. ўо таке коливанн€?
2. як≥ коливанн€ називаютьс€ гармон≥чними?
3. ƒати визначенн€ параметр≥в гармон≥чних коливань.
4. ќдержати диференц≥альне р≥вн€нн€ незатухаючого гармон≥чного коли≠ванн€ дл€ пружинного ма€тника.
5. –озвТ€зати диференц≥альне р≥вн€нн€ незатухаючих коливань.
6. «аписати вирази дл€ зм≥щенн€, швидкост≥ ≥ прискоренн€ при незатухаю≠чих гармон≥чних коливанн€х та намалювати њх граф≥ки.
7. ќдержати формулу пер≥оду незатухаючих коливань пружинного ма€т≠ника.
Ћ≥тература
1. „олпан ѕ.ѕ. ‘≥зика.- .: ¬ища школа, 2003.- —.77-80.
2. —авельев ».¬. урс общей физики. - т.1, ћ.: Ќаука,1982.- —.195-196.
3. “рофимова “.». урс физики.- ћ: ¬ысша€ школа, 1990.- —.222-223.
≤нструкц≥ю склав доцент кафедри ф≥зики «Ќ“” ћанько ¬. .
Laboratory work є 41
SPRING PENDULUM
Purpose of the work is to study dependence of period of oscillations on mass for a spring pendulum.
Task: to define acceleration offree falling; experimentally to check up the theoretical formula of period of the spring pendulum.
Theory
Oscillations of a spring pendulum are acted upon by the elastic force
 , (2.1)
, (2.1)
where x is a deviation from state of stable equilibrium, k is a rigidity of the spring. The period of oscillations is
 , (2.2)
, (2.2)
where m is mass of the body fixed on the spring.
Spring pendulum (fig.2.1) it a body is suspended on a spring. At the leadingout of it from position of equilibrium of xo on distance of x there is force of elasticity F, which by Hook`s law is evened F = -kx, where k is rigidity of spring. This force gives the acceleration
, or . (2.3)
Equation (2.1) can be write down in such a way
. (2.4)
Designating , get . (2.5)
Equation (2.3) is named differential equation of undamped free harmonic oscillations. The decision of this equation is a harmonic function
, or (2.6)
what sets the coordinate of x load in any moment of time t.
Will consider descriptions of harmonic oscillations. Amplitude of Ao is most deviation of point from position of equilibrium
Cyclic frequency of oscillations Ц (2.7)
it is an amount of oscillations for 2π seconds.
Period of oscillations Ц (2.8)
it is time of one full-oscillate, or time for which the phase of oscillation changes on 2π.
Frequency of oscillations Ц (2.9)
it is an amount of oscillations for 1 second.
From (2.5) and (2.6) get the period of oscillation of the spring pendulum
|
|
|
. (2.10)
When load hangs on a spring, which does not carry out oscillations, it deforms a spring on the size of хо. By Hook`s law of F = mg = kxo, it is possible to find rigidity of spring
. (2.11)
Then a formula (2.8) for the period of oscillations assumes an air
(2.12), or . (2.13)
Thus, experimentally measuring the period of oscillations of T and lengthening of spring of хо, from its undeformed state to position of equilibrium at the different loadings, it is possible on the angle of slope of graph of T2 = f(xo) (see a formula 2.11) to find the acceleration of the free falling. The first task is so executed.
The second task of work is executed on the basis of formula (2.8), that the linearness of dependence is checked up .
Order of execution
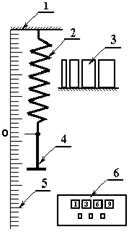
Figure 2.1
1. Varying the weights on the spring measure time of 50 oscillations by the stop-watch (once for each weight). Then calculate a period of oscillations for each measurement.
2. Represent graphically the dependence of period  on
on  .
.
3. Using the graph determine a rigidity of the spring.
To take off from a spring fastening of loads and to mark position of end of spring on a line (points of hang up of fastening).
1. To hang up fastening and, combining the set of loads, to change general mass of m of a spring pendulum from the least (one fastening to most, all loads is suspended). Mass of fastening is 11 g, the masses of loads see on them.
2. With the chosen mass of m to measure deformation of хо spring to position of equilibrium, and then, giving small amplitude (2 ÷ 3 sm), to measure a stop-watch time 20 oscillations. To add the results of measurings to the table 2.1. An amount of combinations of the masses must be not less 9 ÷ 10.
Table 2.1
| n | m, kg | xo, sm | t, s | T, s | T2, s2 | ,
kg0.5
|
| ka |
| - | ||||||||
| - |
On results of every experience to expect rigidity of spring k on formula (2.9) and to find it mean value.
3. To build graphics: 1) “2 = f(xo); 2)
4. On lineal parts of graph (2.3) to choose for two points 1 ÷ 2 and 3 ÷ 4, to define their coordinates for to the axes, but not from a table, and after formulas (2.12) and (2.13) to expect g and k.

Figure 2.2
 (2.14) (2.15)
(2.14) (2.15)
5. To draw conclusion, comparing the value of g to tabular, and k, got after a formula (2.3), with a mean value, found after a formula (2.9). In a conclusion also to mark or are lineТs graphic got in experiments and if so, then what does it testify to?
Questions
1. What kind of oscillations is called harmonic? Write the dependence of deviation upon time for harmonic oscillations.
2. Give definitions for period, amplitude, frequency, cyclic frequency and phase.
3. Write the differential equation of harmonic oscillations.
4. Write the formula for period of a spring pendulum. What is a rigidity of a spring?
Translator: S.P. Lushchin, the reader, candidate of physical and mathematical sciences.
Reviewer: S.V. Loskutov, professor, doctor of physical and mathematical sciences.
Approved by the chair of physics. Protocol є 6 from 30.03.2009.
ЋјЅќ–ј“ќ–Ќј –ќЅќ“ј є 42
|
|
|
ћј“≈ћј“»„Ќ»… ћјя“Ќ»
ћета роботи: вивченн€ закон≥в коливанн€ математичного ма€тни- ка.
«авданн€: а) перев≥рити залежн≥сть пер≥оду в≥льних коливань ма- тематичного ма€т≠ника в≥д довжини нитки;
б) визначити прискоренн€ в≥льного пад≥нн€.
ѕрилади ≥ обладнанн€: математичний ма€тник, секундом≥р, л≥-
н≥йка.
 ≈кспериментальна установка (рис.3.1) складаЇтьс€ з кронштейна 1, через €кий перекинута нитка 3, на одному к≥нц≥ €коњ привТ€зана масивна кул€ 4, а другий к≥нець закр≥пле≠ний на котушц≥ 5. √умова бусинка 2 може перем≥щуватись по нитц≥ ≥ слугуЇ дл€ вим≥рюва≠нн€ зм≥ни њњ довжини, коли кул€ 3 опуститьс€ нижче л≥н≥йки 7. ƒовжина L нитки зм≥нюЇтьс€ шл€хом намотуванн€ њњ на коту≠шку 5, €ка ф≥ксуЇтьс€ стопорним гвинтом 6. «м≥на довжини нитки вим≥рю≠Їтьс€ л≥н≥йкою 7.
≈кспериментальна установка (рис.3.1) складаЇтьс€ з кронштейна 1, через €кий перекинута нитка 3, на одному к≥нц≥ €коњ привТ€зана масивна кул€ 4, а другий к≥нець закр≥пле≠ний на котушц≥ 5. √умова бусинка 2 може перем≥щуватись по нитц≥ ≥ слугуЇ дл€ вим≥рюва≠нн€ зм≥ни њњ довжини, коли кул€ 3 опуститьс€ нижче л≥н≥йки 7. ƒовжина L нитки зм≥нюЇтьс€ шл€хом намотуванн€ њњ на коту≠шку 5, €ка ф≥ксуЇтьс€ стопорним гвинтом 6. «м≥на довжини нитки вим≥рю≠Їтьс€ л≥н≥йкою 7.
“еоретична частина

ћатематичний ма€тник Ц це т≥ло масою m, €ке можна вважати матер≥альною точкою, п≥дв≥шене на невагом≥й нерозт€гуван≥й нитц≥. «найде≠мо пер≥од коливань такого ма€тника. якщо нитку в≥≠д≠хилити в≥д вертикального положенн€, виникаЇ зво≠ротний мо≠мент сили т€ж≥нн€ mg, плече €коњ дор≥внюЇ LЈsinα (рис.3.2). ѕ≥д д≥Їю цього моменту т≥ло m обертаЇтьс€ навколо точки п≥дв≥≠су ќ. «аписуЇмо основне р≥вн€нн€ динам≥ки обертально≠го руху
 . (3.1)
. (3.1)
“ут:  - момент ≥нерц≥њ матер≥альноњ точки,
- момент ≥нерц≥њ матер≥альноњ точки,  куто≠ве прискоренн€. «нак м≥нус враховуЇ, що момент сили mg зменшуЇ кут α.
куто≠ве прискоренн€. «нак м≥нус враховуЇ, що момент сили mg зменшуЇ кут α.
ќдержуЇмо диференц≥альне р≥вн€нн€ незатухаючих коливань математичного ма€тника
 . (3.2)
. (3.2)
ѕри малих кутах α (менших 5о) можна вважити, що sin α = α. ќдержуЇмо  . (3.3)
. (3.3)
ѕор≥внюючи це р≥вн€нн€ ≥з загальним р≥вн€нн€м незатухаючих гармон≥чних коливань  , (3.4)
, (3.4)
маЇмо  - цикл≥чна частота коливань, “ Ц пер≥од коливань математичного ма€тника. ѕрийн€вши L = L0 + ΔL, одержуЇмо
- цикл≥чна частота коливань, “ Ц пер≥од коливань математичного ма€тника. ѕрийн€вши L = L0 + ΔL, одержуЇмо
 . (3.5)
. (3.5)
ѕ≥днесемо це р≥вн€нн€ до квадрату
 . (3.6)
. (3.6)
¬идно, що залежн≥сть квадрату пер≥оду “2 в≥д зм≥ни довжини нитки ΔL за теор≥Їю повинна бути л≥н≥йною, а њњ нахил визначаЇтьс€ прискоренн€м в≥льного пад≥нн€ g.
–озвТ€зком р≥вн€нн€ (3.4) Ї р≥вн€н≠н€ незатухаючих гармон≥чних коливань
 . (3.7)
. (3.7)
ѕрактична частина
1. ¬≥дпустити стопорний гвинт 5 ≥ встановити довжину нитки приблизно 50 см.
2. ѕривести ма€тник у коливальний рух, в≥дхиливши його на кут не б≥льший, н≥ж 5о.
3. ¬ одному з крайн≥х положень ма€тника, €кий коливаЇтьс€, ув≥мкнути секундом≥р ≥ вим≥р€ти час 20 повних коливань. –езультат записати в таблицю 3.1. ÷е в≥дпов≥датиме значенню ΔL = 0.
“аблиц€ 3.1
| t, сек. | “ = t/20, сек. | “2, сек2 | ΔL, см |
4. «ам≥тити положенн€ бусинки 2 по л≥н≥йц≥ 7. ¬≥дпустити стопорний гвинт 6 ≥ подовжити нитку на ΔL = 10 см. ѕодовженн€ нитки вим≥рювати по перем≥щенню разом з нею бусинки. «акрутити стопорний гвинт.
5. ѕовторювати п. 2 - 5 до максимально можливоњ довжини нитки (до п≥длоги). оли бусинка опуститьс€ нижче л≥н≥йки, перем≥стити њњ вгору.
6. –озрахувати пер≥од “ = t/20 та його квадрат. –езультат занести в таблицю 3.1.
7.  ѕобудувати граф≥к залежност≥ квадрата пер≥оду “2 в≥д подовженн€ нитки ΔL(рис.3.3). Ћ≥н≥йний вид цього граф≥ка св≥дчить про справедлив≥сть залежност≥ (3.5) “ ~
ѕобудувати граф≥к залежност≥ квадрата пер≥оду “2 в≥д подовженн€ нитки ΔL(рис.3.3). Ћ≥н≥йний вид цього граф≥ка св≥дчить про справедлив≥сть залежност≥ (3.5) “ ~  .
.
8. Ќа пр€мол≥н≥йн≥й частин≥ граф≥ка вибрати дв≥ точки 1 ≥ 2, ви
9. значити њх координати  . «найти прискоренн€ в≥льного пад≥нн€ за формулою:
. «найти прискоренн€ в≥льного пад≥нн€ за формулою:
 . (3.8)
. (3.8)
10. ѕор≥вн€ти одержане значенн€ з табличним 9,8 м/с2. «робити висно≠вок.
онтрольн≥ запитанн€
1. ўо таке математичний ма€тник?
2. —клад≥ть та запиш≥ть диференц≥альне р≥вн€нн€ в≥льних гармон≥чних коливань математичного ма€тника.
3. «апиш≥ть р≥вн€нн€ коливань, €ке Ї р≥шенн€м диференц≥ального р≥вн€н≠н€ математичного ма€тника. Ќакресл≥ть граф≥к цього р≥вн€нн€.
4. ƒати визначенн€ величинам, €к≥ вход€ть у р≥вн€нн€ коливань математич≠ного ма€тника.
5. «аписати формули дл€ пер≥оду та цикл≥чноњ частоти коливань математичного ма€тника.
Ћ≥тература
1. „олпан ѕ.ѕ. ‘≥зика.- .: ¬ища школа, 2003.- —.77-80.
2. —авельев ».¬. урс общей физики. - т.1, ћ.: Ќаука,1982.- —.195-196.
3. “рофимова “.». урс физики.- ћ: ¬ысша€ школа, 1990.- —.222-223.
≤нструкц≥ю склав доцент каф. ф≥зики «Ќ“” ћанько ¬. .
Laboratory work є 42
MATHEMATICAL PENDULUM
Purpose of work: to measure the free fall acceleration.
INSTRUMENTATION AND APPLIANCES: mathematical pendulum; the stop-watch, straightedge.
Short theory
The point mass suspended by means of an unelastic weightless thread is called the mathematical pendulum. The restoring force is the projection of the force of gravity P=mg on the direction of motion of the point mass. In this case
|
|
|
 ,
,
where a = x/l, the angle between positions of l in free state and deviation state.
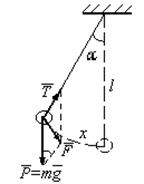
Figure 4.1
If the angles a are so small that sinaї a, then
 .
.
Since this force is always directed to the equilibrium position and that is why it has a sign opposite to that of x:

In this case the oscillations are harmonic. The second NewtonТs law is
 .
.
Finally we obtain the differential equation of harmonic oscillations:
 .
.
If g/l=w2, then
 .
.
Solution of this equation is

The cyclic frequency is
 ,
,
and period is equal
 ,
,
i. e., the frequency and the period of oscillations do not depend on the mass of the oscillating body; they are determined only by the length of the thread and the free fall acceleration. The measurement of the period of a mathematical pendulum is used for determine g:
 .
.
Experimental part
1. Fix the end of the cord in the first position (l = 50 cm). Make the pendulum vibrate (the amplitude of vibration must not be more than the ball diameter). Determine time of 50 oscillations by the stop-watch three times and calculate the period T using the average value of the time.
2. Determine the free fall acceleration g.
3. Calculate an error.
4. Investigate relation between the period T and the length l. Put the end of the cord in the second position (l = 150 cm). Calculate period of oscillations  in the same way and compare with T.
in the same way and compare with T.
5. Increase the amplitude of oscillations twice. Test independence of the period on the amplitude of oscillations (small amplitude and big amplitude).
6. Make conclusions.
Control questions
1. What is a mathematical pendulum?
2. What kind of oscillations is called harmonic?
3. Write the differential equation of harmonic oscillations.
4. Write the dependence of deviation upon time for harmonic oscillations. Show this dependence in figure.
5. Give definitions for a period, an amplitude, a frequency, a cyclic frequency and a phase of vibration.
Translator: S.P. Lushchin, the reader, candidate of physical and mathematical sciences.
Reviewer: S.V. Loskutov, professor, doctor of physical and mathematical sciences.
Approved by the chair of physics. Protocol є 6 from 30.03.2009.
ЋјЅќ–ј“ќ–Ќј –ќЅќ“ј є 43.1
‘≤«»„Ќ»… ћјя“Ќ»
ћета роботи: вивченн€ закон≥в коливанн€ф≥зичного ма€тника.
«авданн€: а) перев≥рити залежн≥сть пер≥оду в≥льних коливань ф≥≠-зи≠чного ма€т≠ника в≥д його моменту ≥нерц≥њ;
б) визначити величину прискоренн€ в≥льного пад≥нн€.
ѕрилади ≥ обладнанн€: ф≥зичний ма€тник, секундом≥р, л≥н≥йка.
 ≈кспериментальна установка (рис.5.1) складаЇтьс€ ≥з основи 1, ви≠р≥вню≠ванн€ €коњ зд≥йснюЇтьс€ н≥жками 2. ¬ основ≥ закр≥плена ст≥йка 3, на €к≥й ф≥ксуЇ≠ть≠с€ нижн≥й кронштейн 4 з фотоелектричним датчиком 5. Ќа верхньому кронштейн≥ 6 п≥≠д≠в≥шений ф≥зичний ма€тник. ¬≥н склада≠Ї≠ть≠с€ з≥ стержн€ 7, ванта≠жу 8 ≥ ф≥ксатора 9. Ќа стержн≥ 7 через 10мм зроблен≥ к≥льцев≥ нар≥зки дл€ точного визначен≠н€ довжини ма€тника та ч≥ткоњ ф≥ксац≥њ вантажу 8. Ќа пе≠редн≥й панел≥ приладу знаход€тьс€: ≥ндикатор к≥лькост≥ коливаньЦ10, ≥ндика≠тор часуЦ14, вимикач≥ У—≈“№ФЦ11 У—Ѕ–ќ—ФЦ12 ≥ У—“ќѕФЦ13.
≈кспериментальна установка (рис.5.1) складаЇтьс€ ≥з основи 1, ви≠р≥вню≠ванн€ €коњ зд≥йснюЇтьс€ н≥жками 2. ¬ основ≥ закр≥плена ст≥йка 3, на €к≥й ф≥ксуЇ≠ть≠с€ нижн≥й кронштейн 4 з фотоелектричним датчиком 5. Ќа верхньому кронштейн≥ 6 п≥≠д≠в≥шений ф≥зичний ма€тник. ¬≥н склада≠Ї≠ть≠с€ з≥ стержн€ 7, ванта≠жу 8 ≥ ф≥ксатора 9. Ќа стержн≥ 7 через 10мм зроблен≥ к≥льцев≥ нар≥зки дл€ точного визначен≠н€ довжини ма€тника та ч≥ткоњ ф≥ксац≥њ вантажу 8. Ќа пе≠редн≥й панел≥ приладу знаход€тьс€: ≥ндикатор к≥лькост≥ коливаньЦ10, ≥ндика≠тор часуЦ14, вимикач≥ У—≈“№ФЦ11 У—Ѕ–ќ—ФЦ12 ≥ У—“ќѕФЦ13.
ѕ≥д час руху ма€тника св≥тловий пот≥к в≥д лампочки фотоелектричного датчика перекри≠ваЇтьс€, що вмикаЇ електронну схему п≥дра≠хунку к≥лькост≥ коливань та се≠кундом≥р. ѕ≥сл€ натискуванн€ вимикача У—“ќѕФ секундом≥р зупин€Їтьс€ п≥сл€ зак≥нченн€ поточного повного коливанн€.
“еоретична частина
 ‘≥зичний ма€тник Ц це т≥ло, €ке може обертатись в≥дно≠сно дов≥льноњ горизонтальноњ ос≥, що не прохо≠дить через центр маси. ѕ≥д д≥Їю моменту сили т€ж≥нн€ mg, плече €коњ дор≥внюЇ LЈsinα, т≥ло обертаЇтьс€ навколо точки п≥дв≥су ќ (рис.5.2). L Ц в≥дстань в≥д точки ќ обертан≠н€ (точки п≥дв≥су) до точки — - центра маси т≥ла. «аписуЇмо основне р≥вн€нн€ динам≥ки обер≠тального руху
‘≥зичний ма€тник Ц це т≥ло, €ке може обертатись в≥дно≠сно дов≥льноњ горизонтальноњ ос≥, що не прохо≠дить через центр маси. ѕ≥д д≥Їю моменту сили т€ж≥нн€ mg, плече €коњ дор≥внюЇ LЈsinα, т≥ло обертаЇтьс€ навколо точки п≥дв≥су ќ (рис.5.2). L Ц в≥дстань в≥д точки ќ обертан≠н€ (точки п≥дв≥су) до точки — - центра маси т≥ла. «аписуЇмо основне р≥вн€нн€ динам≥ки обер≠тального руху
 , (5.1)
, (5.1)
I - момент ≥нерц≥њ т≥ла, - кутове прискоренн€. «нак м≥нус враховуЇ, що момент сили mg зменшуЇ кут α. “аким чином, одержуЇмо диференц≥альне р≥вн€нн€ незатухаючих коливань ф≥зичного ма€тника
 . (5.2)
. (5.2)
ѕри малих кутах α (менших 5о) можна вважити, що sin α = α. ќдержуЇмо  (5.3)
(5.3)
ѕор≥внюючи одержане р≥вн€нн€ ≥з загальним р≥вн€нн€м незатухаючих гармон≥чних коливань  , (5.4)
, (5.4)
одержимо цикл≥чну частоту коливань  .ѕер≥од коливань ф≥зичного ма€тника
.ѕер≥од коливань ф≥зичного ма€тника
 (5.5)
(5.5)
–озвТ€зком р≥вн€нн€ (5.4) Ї р≥вн€н≠н€ незатухаючих гармон≥чних коливань
 (5.6)
(5.6)
 ƒл€ виконанн€ першого пункту завдан≠н€ необх≥дно зм≥нювати момент ≥нерц≥њ ма€≠тника. ÷е зд≥йснюЇтьс€ шл€хом перем≥щен≠н€ вантажу 8 вздовж стержн€ 7 (рис.5.1). јле при цьому зм≥нюЇтьс€ ≥ положенн€ центра маси, тобто в≥дс≠тань L, що також необх≥дно врахувати.
ƒл€ виконанн€ першого пункту завдан≠н€ необх≥дно зм≥нювати момент ≥нерц≥њ ма€≠тника. ÷е зд≥йснюЇтьс€ шл€хом перем≥щен≠н€ вантажу 8 вздовж стержн€ 7 (рис.5.1). јле при цьому зм≥нюЇтьс€ ≥ положенн€ центра маси, тобто в≥дс≠тань L, що також необх≥дно врахувати.
ћомент ≥нерц≥њ ма€тника в≥дносно точ≠ки коливанн€ ќ дор≥внюЇ сум≥ моменту ≥не≠рц≥њ ва≠н≠тажу (матер≥альноњ точки) Iвант = ћZ2 ≥ стерж≠н€. ¬раховуючи теорему Ўтейнера, маЇ≠мо Iстержн€ = 1/12 mb2 + m(b/2 Ц a)2 (рис.5.3). “аким чином момент ≥нерц≥њ ма€тника, €к функц≥€ в≥дстан≥ Z в≥д точки п≥дв≥су до центра ванта≠жу
I = ћZ2 + 1/12 mb2 + m(b/2 Ц a)2 (5.7)
«найдемо положенн€ точки — центра мас ма€тника, тобто в≥дстань L €к функц≥ю Z. «а правилом момент≥в в≥дносно точки — (рис.5.3) маЇмо
mgZ1 = MgZ2 (5.8)
≤з рис.5.3 видно, що L = Z Ц Z2, ≥ Z1 + b/2 =L + a. (5.9)
≤з р≥вн€нь (5.8) Ц (5.9) знаходимо
 (5.10)
(5.10)
ѕ≥дстановка (5.7) ≥ (5.10) в (5.5) п≥сл€ п≥днесенн€ (5.5) до квадрату даЇ
 , (5.11)
, (5.11)
де  ,
,  ,
,
а 
 . (5.12)
. (5.12)
“аким чином, залежн≥сть Y = f(X) за теор≥Їю повинна бути л≥н≥≠й≠ною. ≈кспериментально досл≥джуЇтьс€ залежн≥сть м≥ж пер≥одом коливань “ ф≥зичного ма€тника та в≥дстанню Z вантажу до точки п≥дв≥су. ЅудуЇтьс€ граф≥к у координатах Y = f(X). якщо одержуЇтьс€ пр€мол≥н≥йний граф≥к, то це п≥дтверджуЇ справедлив≥сть теоретичних формул (5.5) ≥ (5.7), а по нахилу граф≥ка можна розрахувати прискоренн€ в≥ль≠ного пад≥нн€ g. —п≥впаданн€ його з табличним значенн€м 9,8 м/с2 к≥льк≥сно п≥дтверджуЇ справедлив≥сть теоретичних сп≥вв≥дношень.
ѕрактична частина
1. ”в≥мкнути вилку живленн€ приладу в мережу 220 ¬ ≥ натиснути кнопку Д—≈“№Ф.
2. «н€ти ма€тник з кронштейна 6, в≥дпустити ф≥ксатор 9 ≥ встановити центр вантажу 8 на в≥дстан≥ 10 см в≥д точки п≥дв≥су. ¬≥дстань вим≥рювати к≥льк≥с≠тю видимих к≥льцевих нар≥зок на стержн≥ в≥д опорноњ призми (точки п≥дв≥су) до вантажу плюс 1 см, що враховуЇ товщину вантажу (2 см). ƒобиватись ч≥т≠коњ ф≥ксац≥њ вантажу в нар≥зках.
3. ѕ≥дв≥сити ма€тник на кронштейн 6. ѕри цьому сл≥дкувати за над≥йн≥стю його кр≥пленн€, щоб опорна призма ч≥тко потрапила у заглибленн€.
4. ¬≥дрегулювати положенн€ кронштейна 4 так, щоб нижн≥й к≥нець стержн€ ма€тника 7 не зач≥павс€ за фотоелектричний датчик 5, але перекривав його пром≥нь.
5. ѕривести ма€тник у коливанн€, в≥дхиливши його на кут не б≥льший, н≥ж 5о.
6. ѕ≥сл€ того, €к ма€тник зд≥йснить 1 ÷ 2 коливанн€, натиснути кнопку У—Ѕ–ќ—Ф. ѕочнетьс€ в≥дл≥к часу та к≥лькост≥ коливань, що буде видно на в≥дпов≥дних ≥ндикаторах.
7. оли на ≥ндикатор≥ к≥лькост≥ коливань по€витьс€ цифра 9, натиснути кнопку У—“ќѕФ. ѕ≥сл€ зак≥нченн€ останнього 10-го коливанн€ зупинитьс€ секундом≥р.
8. ¬изначити пер≥од коливань, под≥ливши час на к≥льк≥сть коливань, тобто на 10. ¬≥дстань Z та пер≥од “ записати в таблицю 5.1.
“аблиц€ 5.1
| Z, см | Y = Z2, см2 | “, сек. | ’, см×с2 |
| - | |||
| - |
9. ѕовторювати пп. 2 ÷ 8, кожного разу перем≥щувати вантаж вниз на 2 см (по дв≥ нар≥зки) до найнижчого можливого положенн€.
10. «а формулою (5.12) розрахувати ’ ≥ записати в таблицю 5.1.
11.  ѕараметри ма€тника: в≥дношенн€ мас m/M = 0,3; довжина верхнього к≥нц€ стержн€ до точки п≥дв≥су а = 5 см; загальна довжина стержн€ b = 59 см. –озрахунки зручн≥ше виконувати на ≈ќћ.
ѕараметри ма€тника: в≥дношенн€ мас m/M = 0,3; довжина верхнього к≥нц€ стержн€ до точки п≥дв≥су а = 5 см; загальна довжина стержн€ b = 59 см. –озрахунки зручн≥ше виконувати на ≈ќћ.
ѕобудувати граф≥к залежност≥ Y=f(X).
12. Ќа пр€≠мо≠л≥н≥йн≥й його частин≥ вибрати дв≥ точки 1 ≥ 2, (рис.5.4) визначи≠ти њх координати по ос€м, але не ≥з таб≠лиц≥, ≥ знайти прискоренн€ в≥≠ль≠ного пад≥нн€ за формулою
 , см/с2. (5.13)
, см/с2. (5.13)
13. ѕор≥вн€ти одержане значенн€ з дов≥дковим 980 см/с2. «робити висновок.
онтрольн≥ запитанн€
1. ўо таке ф≥зичний ма€тник?
2. —клад≥ть та запиш≥ть диференц≥альне р≥вн€нн€ в≥льних гармон≥чних коливань ф≥зичного ма€тника.
3. «апиш≥ть р≥вн€нн€ коливань, €ке Ї розвТ€зком диференц≥ального р≥вн€н≠н€ ф≥зичного ма€тника. Ќакресл≥ть граф≥к цього р≥вн€нн€.
4. як називають величини, що вход€ть в р≥вн€нн€ коливань ф≥зич≠ного ма€тника. як≥ розм≥рност≥ цих величин?
5. «апиш≥ть формули дл€ пер≥оду та цикл≥чноњ частоти коливань ф≥зичного ма€тника.
Ћ≥тература
1. „олпан ѕ.ѕ. ‘≥зика.- .: ¬ища школа, 2003.- —.77-80.
2. —авельев ».¬. урс общей физики. - т.1, ћ.: Ќаука,1982.- —.196-199.
3. “рофимова “.». урс физики.- ћ: ¬ысша€ школа, 1990.- —.222-223.
≤нструкц≥ю склав доцент каф. ф≥зики «Ќ“” ћанько ¬. .
6 LABORATORY Work є 43.1
PHYSICAL PENDULUM
Purpose of work: check the dependence of physical pendulum free oscillations period from its moment of inertia; determine the value of the free fall acceleration.
DEVICES AND EQUIPMENT: physical pendulum, stopwatch, straightedge.
The experimental setting(fig.6.1 ) consists of the base 1, alignment of which is carried out by legs 2. The rack is fastened in the base 3, on which the bottom supporting arm 4 is fixed with photoelectric sensor 5. On the top supporting arm 6 is suspended the physical pendulum, which includes the rod 7, weight 8 and detent 9. On the rod 7 in 10 mm collar marks are made for the exact determination of the length and exact weight 8 fixation.
On the front gage panel there are: 10 Ц oscillation indicator, 14 Ц indicator of time, switches: -11 У—етьФ, 12 У—бросФ, 13 У—топФ.

Figure 6.1
During the pendulum motion the flow of light from the lamp of the photoelectric sensor overlap and the electronic computation circuit of oscillations number and stopwatch actuates. After pressing the switch УSTOPФ the stopwatch stanching after the end of full current oscillations.
Theoretical part
Physical pendulum Ц is the solid, which can rotate relatively to the arbitrary of the horizontal axis that doesnТt pass through the center of mass. Moment of the gravity force mg, the arm of which is equal LЈsin α. Value of L is the distance from pivot ќ (suspension center) to point — Ц the center of the mass of the body. Under the action of this moment the body turns round the suspension center ќ.

Figure 6.2
Write down the fundamental equation of the rotational motion dynamics
 , (6.1)
, (6.1)
where I is the moment of inertia of the body,  is angular acceleration, minus accounts that the moment of force of mg reduces the angle α. Thus, we get the differential equation of physical pendulum free oscillations
is angular acceleration, minus accounts that the moment of force of mg reduces the angle α. Thus, we get the differential equation of physical pendulum free oscillations
 . (6.2)
. (6.2)
If angle α is small (less than 5о) we can consider that sin α = α. We get
 . (6.3) Comparing the received equation with the general equation of free harmonic oscillations
. (6.3) Comparing the received equation with the general equation of free harmonic oscillations
 , (6.4) where
, (6.4) where  - is cyclic frequency of oscillations, “ Ц period. LetТs get the equation of the period of oscillations
- is cyclic frequency of oscillations, “ Ц period. LetТs get the equation of the period of oscillations
 . (6.5) Equation solution (6.4) is the harmonic function which is the equation of free harmonic oscillations
. (6.5) Equation solution (6.4) is the harmonic function which is the equation of free harmonic oscillations
 . (6.6) For performing the first task point we need to change the moment of inertia of the pendulum. It is carried out by moving the weight 8 along the rod 7. But in this way the mass center position changes, it is the distance L.
. (6.6) For performing the first task point we need to change the moment of inertia of the pendulum. It is carried out by moving the weight 8 along the rod 7. But in this way the mass center position changes, it is the distance L.
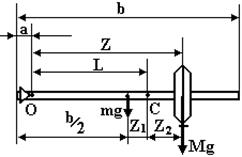
Figure 6.3
The moment of inertia of the pendulum relatively to the point ќ is equal to the amount of moment of inertia of the load and rod.

Taking into account Steiner theorem, we obtain
 .
.
Thus, the moment of inertia of the pendulum as function of distance Z from point of suspension to weight center
 . (6.7) LetТs find the position of point — the mass center of pendulum which is the distance L as function Z. By the law of moments relatively to the point C we have:
. (6.7) LetТs find the position of point — the mass center of pendulum which is the distance L as function Z. By the law of moments relatively to the point C we have:
 . (6.8)
. (6.8)
From figure 3 we can see that
 ,
,  . (6.9) From equations (6.8) Ц (6.9) we get
. (6.9) From equations (6.8) Ц (6.9) we get
 . (6.10) Substitution of (6.7) and (6.10) into (6.5) after squaring (6.5) gives us
. (6.10) Substitution of (6.7) and (6.10) into (6.5) after squaring (6.5) gives us
 , (6.11)
, (6.11)
where
 ,
,
 ,
,
а
 . (6.12)
. (6.12)
Thus, dependence Y = f(X) according to the theory, must be linear. Experimentally researched is the dependence of oscillations period “ of physical pendulum and distance Z from weight to suspension center. We plot the graph (6.12)
Y=f(X).
If you get a rectilinear graph, it confirms validity of theoretical formulas (6.5) and (6.7), and on its slope we can find the free fall acceleration g. Its coincidence with tabulated value 9,8 m/s2 confirms truth of the theoretical ratio.
Work procedure
1. Connect a device to the mains 220 V and push the button Д—етьФ.
2. Remove the pendulum from the support arm 6, release the detent 9 and station the weight 8 center on the distance 10 сm from the suspension point. Measure the distance with the number of known collar marks on the rod from supportive prisms (suspension center) plus 1 сm to the weight which includes the thickness of the load (2 sm). Seek a clear fixing of a load in marks.
3. Hang up the pendulum on the supportive arm 6. Watch after its mounting reliability.
4. Regulate the supportive arm 4 position so that the bottom rod end of physical pendulum 7 wonТt catch on photoelectric sensor 5, but block its ray.
5. Activate physical pendulum in oscillations, having rejected it on a corner less than 5о.
6. After the pendulum make 1 ÷ 2 oscillations, push the button У—бросФ. Counting of time and oscillations number will start which will be visible on corresponding indicators.
7. When oscillations indicator shows up number 9, press the button У—топФ. The last 10-th oscillation will finish and the stopwatch will stop.
8. Define the period of oscillations, dividing time for oscillations number that is 9. Distance Z and period “ write down to the table.
9. Repeat points 2÷8, removing the weight down in 2 cm to the possibly lowest weight position.
10. Under formula (6.12) calculate ’ and write it down to the table. Pendulum parameters are: mass ratio  0,3; Length of the bottom rod end to suspension point а = 5 cm; total rod length b = 59 cm. Calculation it is more convenient to do on the computer.
0,3; Length of the bottom rod end to suspension point а = 5 cm; total rod length b = 59 cm. Calculation it is more convenient to do on the computer.
11. Plot the dependence Y = f(X) and choose two points 1 and 2 on its rectilinear part and define its coordinate by axes, not from the table, on the graph inclination find the free fall acceleration by the formula
 , cm/s2. (6.13) Compare the received value with reference 980 cm/s2. Write the conclusion.
, cm/s2. (6.13) Compare the received value with reference 980 cm/s2. Write the conclusion.
Table 6.1
| Z, cm | Y=Z2, cm2 | “, s | ’, cm×s2 |

Figure 6.4
Control questions
6. What is the physical pendulum?
7. Deduce and write down the differential equation of physical pendulumТs free harmonic oscillations.
8. Write down the oscillations equation which is the solution of physical pendulum differential equation. Plot the graph of this equation.
9. What is the name of values which are a part of physical pendulum oscillations equation? What units they have?
10. Write down formulas for period and physical pendulumТs cyclic oscillation frequency.
Literature
1. „олпан ѕ.ѕ. ‘≥зика.- .: ¬ища школа, 2003.- —.77-80.
2. —авельев ».¬. урс общей физики. - т. 1, ћ.: Ќаука,1982.- —.196-199.
3. “рофимова “.». урс физики.- ћ: ¬ысша€ школа, 1990.- —.222-223.
Translator: S.P. Lushchin, the reader, candidate of physical and mathematical sciences.
Reviewer: S.V. Loskutov, professor, doctor of physical and mathematical sciences.
Approved by the chair of physics. Protocol є 6 from 30.03.2009.
ЋјЅќ–ј“ќ–Ќј –ќЅќ“ј є 43.2
ќЋ»¬јЌЌя —“≈–∆Ќя
ћета роботи: досл≥дити залежн≥сть пер≥оду коливань стержн€ в≥д в≥дстан≥ м≥ж в≥ссю обертанн€ та центром мас.
ѕрилади: стержень, л≥н≥йка, секундом≥р.
«авданн€ роботи: а) побудувати теоретичний та експериментальний граф≥ки залежност≥ пер≥оду коливань стержн€  в≥д безрозм≥рноњ довжини
в≥д безрозм≥рноњ довжини  :
:  ;
;
б) знайти м≥н≥мум функц≥њ  експериментальним та теоретичним шл€хом.
експериментальним та теоретичним шл€хом.
“еоретична частина
оливанн€ми називають процеси, що повторюютьс€ з часом. “аку повторюван≥сть мають, наприклад, рух математичного та ф≥зичного ма€тник≥в, рух струн музичних ≥нструмент≥в, зм≥на зар€ду та напруги на пластинах конденсатора ≥ т. ≥н.
–озгл€немо коливанн€ стержн€, положенн€ ос≥ €кого можна зм≥нювати вздовж стержн€. “акий стержень у€вл€Ї собою ф≥зичний ма€тник. ‘≥зичним ма€тником називають тверде т≥ло дов≥льноњ форми, що маЇ можлив≥сть обертатись навколо горизонтальноњ ос≥ п≥д впливом сили т€ж≥нн€. ѕер≥од коливань ф≥зичного ма€тника визначаЇтьс€ за формулою:
 , (7.1)
, (7.1)
де I Ц момент ≥нерц≥њ стержн€, m Ц його маса, а Ц в≥дстань в≥д ос≥ обертанн€ до центра мас, g Ц прискоренн€ в≥льного руху. 
ћомент ≥нерц≥њ I у даному випадку визначаЇтьс€ за теоремою Ўтейнера:
 , (7.2)
, (7.2)
де  Ц момент ≥нерц≥њ стержн€ в≥дносно ос≥, що проходить перпендикул€рно до стержн€ через його центр:
Ц момент ≥нерц≥њ стержн€ в≥дносно ос≥, що проходить перпендикул€рно до стержн€ через його центр:
 (7.3).
(7.3).
ѕ≥сл€ п≥дстановки (7.2) ≥ (7.3) в формулу (7.1) одержуЇмо:
 (7.4).
(7.4).
ѕроведемо досл≥дженн€ формули (7.4). ¬еличина а може зм≥нюватись в ≥нтервал≥:  .
.
 1. ѕри
1. ѕри  , пер≥од
, пер≥од  , тобто при закр≥пленн≥ стержн€ в центр≥ мас в≥н взагал≥ не буде коливатись, оск≥льки в цьому випадку сумарний момент сил т€ж≥нн€, що д≥ють на стержень у будь-€кому його положенн≥, дор≥внюватиме нулю.
, тобто при закр≥пленн≥ стержн€ в центр≥ мас в≥н взагал≥ не буде коливатись, оск≥льки в цьому випадку сумарний момент сил т€ж≥нн€, що д≥ють на стержень у будь-€кому його положенн≥, дор≥внюватиме нулю.
2. ѕри  дл€ “ одержуЇмо:
дл€ “ одержуЇмо:  (7.5)
(7.5)
3. ƒосл≥дженн€ формули (7.4) на на€вн≥сть екстремуму показуЇ, що функц≥€ маЇ м≥н≥мум, координата €кого знаходитьс€ з умови:  . ѕ≥сл€ диференц≥юванн€ (7.4) знаходимо, що функц≥€ маЇ м≥н≥мум при
. ѕ≥сл€ диференц≥юванн€ (7.4) знаходимо, що функц≥€ маЇ м≥н≥мум при
 , (7.6)
, (7.6)
або приблизно при  .
.
ƒл€ експериментального досл≥дженн€ залежност≥ пер≥оду коливань стержн€ в≥д положенн€ ос≥ обертанн€ застосовуЇтьс€ пристр≥й, зображений на рисунку 7.1. якщо стержень 1 встановити опорною призмою 2 на кронштейн 3, вивести з положенн€ р≥вноваги на де€кий кут  ≥ в≥дпустити, то в≥н буде зд≥йснювати коливанн€ в≥дносно положенн€ р≥вноваги.
≥ в≥дпустити, то в≥н буде зд≥йснювати коливанн€ в≥дносно положенн€ р≥вноваги.
ѕрактична частина
1. ¬им≥р€ти довжину стержн€  .
.
2. ¬становити опорну призму 2 на першому значенн≥ a з таблиц≥.
3. ¬становити стержень на кронштейн 3.
4. ¬ивести ма€тник з положенн€ р≥вноваги на кут  ≥ в≥дпустити; вим≥р€ти час 10 повних коливань. ѕер≥од “ занести в таблицю 7.1.
≥ в≥дпустити; вим≥р€ти час 10 повних коливань. ѕер≥од “ занести в таблицю 7.1.
5. ѕовторити вим≥ри з ≥ншими значенн€ми а, €к≥ вказан≥ в таблиц≥ 7.1.
“аблиц€ 7.1
| n | 
| а, см | “, с |  , см , см
| |
| експеримент | теор≥€ | ||||
| 0,01 | |||||
| 0,02 | |||||
| 0,03 | |||||
| 0,04 | |||||
| 0,05 | |||||
| 0,1 | |||||
| 0,2 | |||||
| 0,3 | |||||
| 0,4 | |||||
| 0,45 |
6. «а формулою (7.4) розрахувати теоретичн≥ значенн€ пер≥оду T. ѕор≥вн€ти експериментальн≥ та теоретичн≥ значенн€ пер≥оду.
7. Ќа одному пол≥ (бажано на м≥л≥метровому папер≥) побудувати теоретичний та експериментальний граф≥ки  за зразком, €кий представлено на рис.7.2.
за зразком, €кий представлено на рис.7.2.

8. «найти першу пох≥дну функц≥њ (7.4) по параметру а. « умови  знайти теоретичне значенн€ координати м≥н≥муму функц≥њ; пор≥вн€ти теоретичне значенн€ з експериментальним, знайденим по граф≥ку.
знайти теоретичне значенн€ координати м≥н≥муму функц≥њ; пор≥вн€ти теоретичне значенн€ з експериментальним, знайденим по граф≥ку.
«робити висновки.
ƒодатково. ѕобудувати теоретичний та експериментальний граф≥ки за допомогою компТютера.
ƒл€ б≥льш детального досл≥дженн€ м≥н≥муму функц≥њ (7.4) провести додатков≥ вим≥рюванн€ пер≥оду коливань в ≥нтервал≥ а  з меншим кроком (наприклад
з меншим кроком (наприклад  ). –озрахувати теоретичн≥ значенн€ пер≥оду при тих самих значенн€х
). –озрахувати теоретичн≥ значенн€ пер≥оду при тих самих значенн€х  . ѕор≥вн€ти теор≥ю з експериментом, побудувавши граф≥ки. «робити висновки, щодо справедливост≥ формул (7.1) Ц (7.4).
. ѕор≥вн€ти теор≥ю з експериментом, побудувавши граф≥ки. «робити висновки, щодо справедливост≥ формул (7.1) Ц (7.4).
онтрольн≥ запитанн€
1. ўо таке гармон≥чн≥ коливанн€? «аписати диференц≥альне р≥вн€нн€ гармон≥чних коливань ≥ його р≥шенн€.
2. ўо так ф≥зичний ма€тник? ¬ивести формулу пер≥оду коливань ф≥зичного ма€тника.
3. —формулювати теорему Ўтейнера
4. ¬ивести формулу пер≥оду коливань стержн€..
5. Ќамалювати граф≥к залежност≥ пер≥оду коливань стержн€ в≥д в≥дстан≥ м≥ж в≥ссю обертанн€ та центром мас.
Ћ≥тература
1. —ивухин ƒ. ¬. ќбщий курс физики. Ц т. 1. Ц ћ.: Ќаука, 1980.
2. —авельев ». ¬. урс общей физики.Ц т. 1. Ц ћ.: Ќаука, 1982.
≤нструкц≥ю склав доцент каф. ф≥зики «Ќ“” ѕравда ћ.≤.
LABORATORY WORK є 43.2
OSCILLATION OF PEG
Purpose of work is to probe dependence of period of oscillations of peg on distance between the axis of rotation and center of peg.
Devices: peg, straightedge, stop-watch.
Task of work: 1) to build the theoretical and experimental graph of dependence of period of oscillations T of peg from dimensionless length

