




Построенная выше функциональная схема САУ дает возможность выделить отдельные динамические звенья первого и второго порядка. Для каждого динамического звена необходимо составить его передаточную функцию и структурную схему.
Тиристорный преобразователь (ТП), вместе с системой управления и фильтром, для сглаживания пульсаций может быть представлен апериодическим звеном с передаточной функцией:

где: Ттп – постоянная времени ТП;
Тф =(0,003…0,005)=0,005 с – постоянная времени фильтра;
 с – время запаздывания силовой части.
с – время запаздывания силовой части.





Датчик скорости и тока при наличии фильтров на входе следует считать апериодическими звеньями с передаточными функциями:
Датчик скорости –

где: Тдс=0,005…0,02=0,01 с – постоянная времени датчика скорости

Датчик тока якоря –

где: Тдт=0,002…0,003=0,002 с – постоянная времени датчика тока
Передаточная функция ДПТ с учетом упругости механической части ЭП:

где:  – постоянная времени, определяющая упругий резонанс на частоте
– постоянная времени, определяющая упругий резонанс на частоте  ;
;


q – коэффициент соотношения инерционных масс;


 – постоянная времени, характеризующая «провал» в ЛАХ объекта на частоте
– постоянная времени, характеризующая «провал» в ЛАХ объекта на частоте 


 - коэффициенты демпфирования упругих звеньев;
- коэффициенты демпфирования упругих звеньев;


Передаточная функция механической части ЭП приведенной к валу двигателя:

Передаточные функции ПИ – регуляторов скорости и тока, построенных на базе операционных усилителей, могут быть представлены в виде:


3.2 Построение структурной динамической схемы и синтез регуляторов
На основе разработанной функциональной схемы и передаточных функций звеньев СЭП необходимо построить динамическую структурную схему (ДСС) системы, обозначив на ней соответствующие функциональные звенья и переменные (регулируемые) параметры.
В системах подчинённого регулирования оптимизация контуров обычно выполняется в соответствии со стандартными настройками с учётом условии работы СЭП и соотношения параметров объекта управления.
В САР скорости контур тока чаще всего настраивается на оптимум по модулю (ОМ), а контур скорости – на симметричный оптимум (СО).
Параметры ПИ – регулятора тока определяются формулами:

,где: 

 – суммарная малая постоянная времени контура тока:
– суммарная малая постоянная времени контура тока:

 с
с

 0,03
0,03
Передаточная функция разомкнутого и замкнутого контуров тока соответственно будут:


Обратной связью по ЭДС двигателя можно пренебречь, т.к. 

В СЭП с упругой связью контур скорости настраивается в зависимости от соотношения механических параметров. Выбираем параметры из условия:
q < 0,5 ( )
)

b1= 
b1= 
t1= 

Данная настройка позволяет достичь:
Частота среза:

Время переходного процесса:

Для подавления упругих колебаний в механической системе следует ввести в САУ дополнительные средства коррекции (вторая ступень оптимизации) введем последовательную коррекцию на активном режекторном фильтре АРФ с передаточной функцией

Где: Kaф =1 и  - эквивалентный коэффициент демпфирования колебаний
- эквивалентный коэффициент демпфирования колебаний

Рис 6. Динамическая структурная схема СЭП с упругостью.
Определяем статическую ошибку  замкнутой СЭП на верхней и нижней скоростях для двухкратноинтегрирующей системы с ПИ – РС и построим соответствующие механические характеристики:
замкнутой СЭП на верхней и нижней скоростях для двухкратноинтегрирующей системы с ПИ – РС и построим соответствующие механические характеристики:

 – значение скорости в рабочей точке
– значение скорости в рабочей точке
 – коэффициент усиления регулятора скорости в статике (Крсо = 10000)
– коэффициент усиления регулятора скорости в статике (Крсо = 10000)




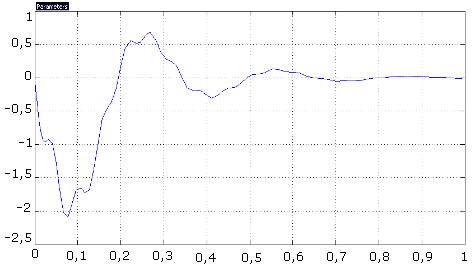
Переходной процесс по задающему воздействию – Iя

Переходной процесс по задающему воздействию – 

Переходной процесс по задающему воздействию – 

Переходной процесс по возмущающему воздействию – Iя
Переходной процесс по возмущающему воздействию -

Переходной процесс по возмущающему воздействию -

ЛЧХ разомкнутого контура скорости СЭП
ВЫВОД
В результате проделанной работы был разработан электропривод главного движения продольно-строгального станка.
Для выполнения технического задания были выбраны следующие силовые элементы:
Электродвигатель 4ПФ180М
Тиристорный преобразователь КТЭ 200/440
Токоограничивающий реактор РТСТ – 100 – 0,505УЗ
Сглаживающий дроссель ДФ – 7
Датчик скорости ТГ – 3
Для получения требуемого качества переходных процессов использовали САУ подчиненного регулирования. Оптимизация САУ производилась с учетом упругости механической системы.
В качестве регулятора скорости использовали ПИ – регулятор, настроенный на симметричный оптимум (СО). В качестве регулятора тока использован ПИ – регулятор, настроенный на оптимум по модулю (ОМ).
Контур управления построен так, что имеет только одну большую постоянную времени (эл. магнитную), следовательно могут быть применены однотипные регуляторы. Применим пропрорционально-интегральные регуляторы (ПИ), это улучшит точность системы (т.е. уменьшит статическую ошибку системы) и повысит быстродействие.
Несомненно ПИД – регуляторы имеют больше преимуществ, но их применение необходимо только при компенсации двух больших постоянных времени, например в контуре с колебательным звеном.
Достоинства разработанной СЭП:
- ТП двигателя с раздельным управлением группами. Для раздельного управления группами не требуется уравнительные ректоры, что является достоинством системы;
- применяется СЭП структурно подчиненного регулирования, что обеспечивает простоту ограничения регулируемых координат, унификацию настроек
Регулятора;
- в системе применен ПИ – регулятор скорости, что обеспечивает пренебрежительно малую статическую ошибку по скорости; РС настроен на СО, что обеспечивает быстрые процессы по возмущающему воздействию;
-  - соответствует заданию, следовательно, система удовлетворяет исходным данным
- соответствует заданию, следовательно, система удовлетворяет исходным данным
 - время переходного процесса по задающему воздействию
- время переходного процесса по задающему воздействию
 - время переходного процесса по возмущающему воздействию
- время переходного процесса по возмущающему воздействию
Разработаны так же защиты ЭП:
1. Максимальная токовая защита обеспечивается установкой автоматического выключателя (АВ) на вводе ТП [ток срабатывания Iср = (12…14)*Iн],
Iср = 12*400 =4800 А
Плавкими предохранителями защищены тиристоры ТВ и ТП, а так же схема управления.
2. Минимальная защита (защита от самозапуска ЭП) обеспечивается линейным контактором [напряжение срабатывания Uср=(0.75…0.8)*Uн];
Uср = 0.79*440=347.6 В
3. Защита от обрыва поля организована установкой реле обрыва поля в цепи обмотки возбуждения (РОП).
4. Тепловая защита
Список литературы
- В.М. Шестаков, А.Е. Епишкин «Автоматизированный электропривод. Методические указания к выполнению курсового проекта для студентов специальности 2102.» ВТУЗ-ЛМЗ. Санкт-Петербург, 2004г.
- Конспект лекций по АЭП
- Конспект лекций по ТАУ
- В.М. Шестаков, В.И. Репкин «Электронные устройства САУ»,1991г.
- В.М. Шестаков «Динамика систем ЭП», 1993г.

