




Элементы, позволяющие управлять вводом и выводом в рабочую область MATLAB промежуточных данных и результатов моделирования, расположены на вкладке Data Import/Export (рис. 5.7).

Рис. 5.7. Вкладка Workspace I/O диалогового окна
установки параметров моделирования
Элементы вкладки разделены на 3 поля:
Load from workspace (Загрузить из рабочей области). Если флажок Input (Входные данные) установлен, то в расположенном справа текстовом поле можно ввести формат данных, которые будут считываться из рабочей области Matlab. Установка флажка Initial State (Начальное состояние) позволяет ввести в связанном с ним текстовом поле имя переменной, содержащей параметры начального состояния модели. Данные, указанные в полях Input и Initial State, передаются в исполняемую модель посредством одного или более блоков In (из раздела библиотеки Sources).
Save to workspace (Записать в рабочую область) – позволяет установить режим вывода значений сигналов в рабочую область MATLAB и задать их имена.
Save options (Параметры записи) – задает количество строк при передаче переменных в рабочую область. Если флажок Limit rows to last установлен, то в поле ввода можно указать количество передаваемых строк (отсчет строк производится от момента завершения расчета). Если флажок не установлен, то передаются все данные. Параметр Decimation (Разряжение) задает шаг записи переменных в рабочую область. Параметр Format (формат данных) задает формат передаваемых в рабочую область данных. Доступные форматы Array (Массив),
Structure (Структура), Sstructure With time (структура с дополнительным полем – «время»).
Output options (Параметры вывода) – задает настройки параметров вывода (выходных сигналов моделируемой системы. Возможен выбор одного из трех вариантов:
Refine output (Скорректированный вывод) – позволяет изменять дискретность регистрации модельного времени и тех сигналов, которые сохраняются в рабочей области Matlab с помощью блока То Workspace. Установка величины дискретности выполняется в строке редактирования Refine factor, расположенной справа. По умолчанию значение Refine factor равно 1, это означает, что регистрация производится с шагом Dt = 1 (то есть для каждого значения модельного времени). Если задать Refine factor равным 2, это означает, что будет регистрироваться каждое второе значение сигналов, 3 – каждое третье т. д. Параметр Refine factor может принимать только целые положительные значения
Produce additional output (Дополнительный вывод) – обеспечивает дополнильную регистрацию параметров модели в заданные моменты времени; их значения вводятся в строке редактирования (в этом случае она называется Output times) в виде списка, заключенного в квадратные скобки. При использовании того варианта базовый шаг регистрации (Dt) равен 1. Значения времени в списке Output times могут быть дробными числами и иметь любую точность.
Produce specified output only (Формировать только заданный вывод) – устанавливает вывод параметров модели только в заданные моменты времени, которые указываются в поле Output times (Моменты времени вывода).
5.1.5. Выполнение расчета.
Запуск расчета выполняется с помощью выбора пункта меню Simulation/Start или инструмента  на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент
на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент  . Расчет также можно остановить (Simulation/Pause) и затем продолжить (Simulation/Continue).
. Расчет также можно остановить (Simulation/Pause) и затем продолжить (Simulation/Continue).
Далее рассмотрим средства пакета Simulink, позволяющие решить задачи анализа, синтеза, расчета и проектирования мехатронных систем при помощи правой кнопки мышки. Ниже, при описании библиотек, рассматриваются те блоки, которые в дальнейшем используются при моделировании мехатронных устройств.
5.2. Библиотеки пакета Simulink
5.2.1. Sources – источники сигналов
Предварительно рассмотрим блоки источников и приемников сигналов, т. к. они используются во всех примерах, демонстрирующих функционирование различных моделей. Окно обозревателя разделов библиотеки Simulink рассмотрено ранее (рис. 5.2)
Библиотека источников сигналов показана на рис. 5.8.
Вся библиотека разбита на два раздела:
1. Входные порты модели и подсистемы (Model and Subsystem Inputs).
2. Генераторы сигналов (Signal Generators).
Входные порты модели и подсистемы содержат четыре блока.
In – блок входного порта. Создает входной порт для подсистемы или модели верхнего уровня иерархии.
В полях окна настройки параметров задаются номер порта (Port number] размерность входного сигнала (Port dimensions, шаг модельного времени и тип данных входного сигнала (Data type):
Ground – блок сигнала нулевого уровня. Предназначен для формирования сигнала нулевого уровня.
Если какой-либо вход блока в модели не подсоединен, то при выполнении моделирования в главном окне MATLAB появляется предупреждающее сообщение. Для устранения этого на неподключенный вход блока можно подать сигнал с блока Ground.
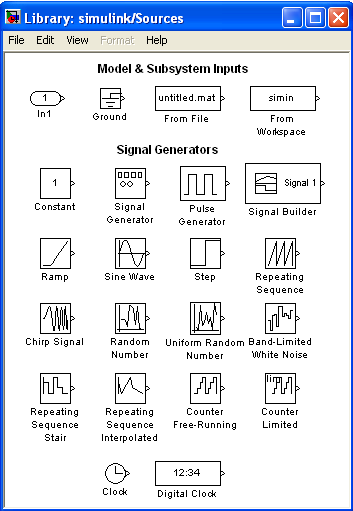
Рис.5.8. Библиотека источников сигнала
From File – блок считывания данных из файла. Предназначен для считывания данных из внешнего файла.
В полях окна настройки параметров задаются имя файла с данными (File Name), шаг изменения выходного сигнала блока (Sample time).
Данные в файле должны быть представлены в виде матрицы.
Матрица должна состоять, как минимум, из двух строк. Значения времени записаны в первой строке матрицы, а в остальных строках находятся значения сигналов, соответствующие данным моментам времени. Значения времени должны быть записаны в возрастающем порядке. Выходной сигнал блока содержит только значения сигналов, а значения времени в нем отсутствуют. Пользователям Simulink удобнее всего создавать mat-файл с помощью блока To File (библиотека Sinks). На рис. 5.9 показан пример использования данного блока. Из файла pila.mat считываются значения пилообразного сигнала (файл To_From_File).

Рис. 5.9. Модель с блоками: To File и From File
Задание: сделать 2…3 модели с разными настройками
From Workspace – блок считывания данных из рабочего пространства MATLAB. Генераторы сигналов содержат большое количество блоков. Ниже описаны некоторые из них, предназначенные для моделирования мехатронных систем.
Constant – задает постоянный по уровню сигнал.
Значение константы может быть действительным или комплексным числом, вычисляемым выражением, вектором или матрицей.
Sine Wave – формирует синусоидальный сигнал с заданной частотой, амплитудой, фазой и смещением нулевого уровня.
При формировании выходного сигнала по текущему значению времени выходной сигнал определяется по выражению:
у = Amplitude* sin(frequency* time + phase) + bias.
Amplitude – Амплитуда.
Bias – Постоянная составляющая сигнала
Frequency (rads/sec) – Частота (рад/с).
Phase (rads) – Начальная фаза (рад).
Sample time – Шаг модельного времени. Используется для согласования работы источника и других компонентов модели во времени.
Signal Generator – генератор сигналов. Формирует один из четырех видов периодических сигналов:
sine – Синусоидальный сигнал.
square – Прямоугольный сигнал.
sawtooth – Пилообразный сигнал.
random – Случайный сигнал.
В полях окна настройки параметров задаются амплитуда сигнала (Amplitude), частота (Frequency).
На рис. 5.10. показано применение блоков Sine Wave и Signal Generator для получения широтно-модулированного сигнала (файл Mod_PWM). 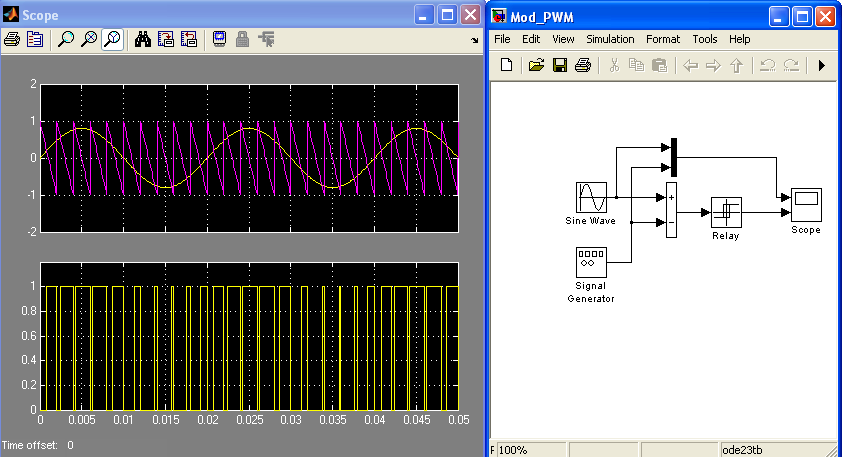
Рис. 5.10. Модель широтно-импульсного модулятора
Задание: сделать 2…3 модели модулятора с разными настройками
Здесь модулирующим является синусоидальный сигнал, а модулируемым – сигнал пилообразный с выхода блока Signal Generator. Широтно-импульсные модуляторы повсеместно используются для управления полупроводниковыми преобразователями в мехатронных системах.
Ramp – источник линейно изменяющегося воздействия. Формирует линейный сигнал вида у = Slope* time + Initial value.
В полях окна настройки параметров задаются скорость изменения выходного сигнала (Slope), время начала формирования сигнала (Start time), начальный уровень сигнала на выходе блока (Initial value).
Step – генератор ступенчатого сигнала. Формирует ступенчатый сигнал величины (Final value) в момент времени (Step time).
Repeating Sequence – блок периодического сигнала. Формирует периодический сигнал, который задается в полях окна настройки параметров в виде двух векторов:
Time values – вектор значений модельного времени.
Output values – вектор значений сигнала для моментов времени заданных вектором Time values.
На рис. 5.11 показан пример использования блока Step и Repeating Sequence для построения функциональной модели широтно-импульсного регулятора постоянного тока. Заданы параметры блока Step: Step time = 0.005 (с), Initial value = – 0.6

Рис. 5.11. Модель широтно-импульсного модулятора
Final value = 0.6. Значения модельного времени в блоке Repeating Sequence заданы вектором [0 0.01 0.02], а значения выходного сигнала вектором [-1 1 -1].
Pulse Generator – источник импульсного сигнала. Формирует импульсный сигнал заданной амплитуды (Amplitude), периода (Period) и длительности импульса в процентах от периода (Pulse width).
Задание. Сделать 2…3 модели ШИМ с другими настройками

