




Для ленточных элеваторов в качестве тягового органа используются резинотканевые ленты (табл. П.3) для рядовых элеваторов и резинотросовые ленты (табл. П.4) для элеваторов большой высоты и с широкими ковшами.
Ширина ленты, мм:
Вл » b + (20 … 150) мм, (2.5)
где b – ширина ковша, мм.
Окончательно ширина ленты принимается в соответствии с нормальным размерным рядом: 100; 120; 140; 160; 200; 250; 300; 400; 500; 650; 800; 1000; 1200; 1400; 1600 мм.
Диаметр приводного барабана D (мм) при использовании резинотросовых лент принимается по табл. П.4 при использовании резинотканевых лент:
D = (125 … 150)× i, (2.6)
где i – число прокладок резинотканевой ленты; предварительно рекомендуется принимать i = 3 – 5.
Окончательное значение диаметра приводного барабана принимается в соответствии с нормальным размерным рядом: 160; 200; 250; 315; 400; 500; 630; 800; 1000; 1250; 1400; 1600; 2000 мм.
Длина барабана, мм
LБ = ВЛ + 50 мм (2.7)
Линейная сила тяжести ленты (тягового органа) qл (Н/м) принимается в зависимости от ширины ленты В:
è для резинотросовых лент:
qТ = g× mЛ× BЛ, (2.8)
где g = 9,81 м/с2; mл - расчетная масса ленты, кг/м2 (табл. П.4); BЛ – ширина ленты, м.
è для резинотканевых лент (ориентировочные значения):
| Bл, мм | |||||||
| qТ, Н/м | |||||||
| Bл, мм | |||||||
| qТ, Н/м |
Принятые характеристики ленты должны быть представлены в табличном виде (табл. 2.2).
Таблица 2.2
Характеристика тягового органа
| Параметр | Величина |
| Тип ленты Марка ленты Ширина ленты ВЛ, мм Число прокладок i Прочность ткани, Н/мм ширины Линейная сила тяжести qТ, Н/м Диаметр барабана D, мм Длина барабана L, мм | … … … … … … … … |
Для цепных элеваторов в качестве тягового органа используются пластинчатые (табл. П.5) втулочные, роликовые и катковые (для наклонных элеваторов с поддерживаемой ветвью) цепи по ГОСТ 588-81 с шагом 100-630 мм и сварные круглозвенные цепи из круглой стали диаметром 16-28 мм по ГОСТ 2319-70 с термической обработкой звеньев.
Одноцепные элеваторы используются при ковшах с шириной в £ 250 мм; при ширине более 250 мм используются двухцепные элеваторы.
Шаг цепи tЦ (мм) выбирается в зависимости от типа и шага установки ковшей tК и должен быть ему кратен:
Þ для глубоких и мелких ковшей:
| tК, мм | |||||
| tЦ, мм | 160;320 | 125;250 | 160;320 |
Þ для сомкнутых ковшей с бортовыми направляющими
tЦ = tК.
Принятое значение шага цепи должно соответствовать нормальному размерному ряду: 40; 50; 63; 80; 100; 125; 160; 200; 250; 315; 400; 500; 630; 800; 1000 мм.
Средний диаметр приводной звездочки, мм:
 (2.9)
(2.9)
где z – число зубьев звездочки; z = 6; 8; 10; 12; 13; 14; 16; 20.
Предварительное значение разрушающей нагрузки цепи, кН:
 , (2.10)
, (2.10)
где Qчас - часовая производительность элеватора, т/ч; r - средняя плотность груза, т/м3; zЦ - число цепей.
По значению РРАЗ принимается типоразмер цепи (табл. П.5). Принятые характеристики цепи должны быть представлены в табличном виде:
Таблица 2.3
Характеристика тягового органа
 Параметр Параметр
| Величина |
| Тип цепи Марка цепи Число цепей Шаг цепи tц, мм Разрушающая нагрузка Рраз, кН Линейная сила тяжести qц, Н/м Средний диаметр звездочки Dзв, мм | … … … … … … … |
Линейная сила тяжести цепи (тягового органа), Н/мм:
 , (2.11)
, (2.11)
где g = 9,81 м/с2; mЦ - масса 1 м цепи, кг (табл.П.5); zЦ - количество цепей.
Частота вращения барабана (звездочки), об/мин:
 (2.12)
(2.12)
 |
где u - скорость тягового органа, м/с; D - диаметр барабана (звездочки), м.
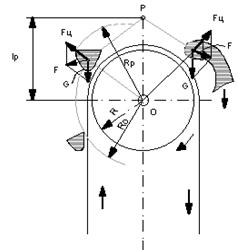
Рис. 2.1. Схема к определению
полюсного расстояния при разгрузке ковшей:
Р – полюс; LР -полюсное расстояние; FЦ -центробежная сила;
G - силатяжести; F - суммарное усилие; R - радиус барабана;
RО - радиус вращения центра тяжести ковша;
RР -наружный радиус вращения ковша.
Полюсное расстояние (см. рис. 2.1), м:
Lp = 895,5/ n 2 (2.13)
Соотношение между полюсным расстоянием и радиусом барабана (звездочки):
Б = 2 LР / D. (2.14)
Соотношение Б определяет быстроходность элеватора и способ разгрузки ковшей:
è при Б £ 1,0 высокоскоростной элеватор с центробежной разгрузкой ковшей;
è при Б = 1,0-1,4 быстроходный элеватор с центробежной и центробежно-самотечной (смешанной) разгрузкой ковшей;
è при Б = 1,4-3,0 среднескоростной элеватор с центробежной, центробежно-самотечной (смешанной) и свободной самотечной разгрузкой ковшей с внутренней стенки;
è при Б > 3,0 тихоходный элеватор со свободной самотечной и самотечной направленной разгрузкой ковшей.
При расхождении принятого способа разгрузки ковшей и определенного соотношением Б рекомендуется внести изменения в проектный расчет.
2.2. Тяговый расчет
Тяговый расчет элеватора выполняется путем последовательного суммирования сопротивлений на отдельных участках контура трассы (рис. 2.2) с учетом сопротивления зачерпыванию груза в нижней части кожуха элеватора.
 |
Рис. 2.2. Схема к тяговому расчету элеватора:
а) схема элеватора; б) диаграмма натяжения тягового органа
Линейная сила тяжести груза, Н/м:
g ГР = g × Qчас / (3,6 u), (2.15)
где Qчас – производительность элеватора, т/ч; g = 9,81 м/с2; u – принятая скорость движения тягового органа (ленты или цепи), м/с.
Минимальное усилие тягового органа будет в нижней точке холостой ветви элеватора, соответствующей предварительному натяжению ленты (цепи) – S0. Все усилия в точках контура трассы при тяговом расчете выражаются через величину S 0.
Усилие в точке «1», Н:
S 1= S 0 (2.16)
Сопротивление зачерпыванию груза, Н:
WЗАЧ = kЗ × gГР × АЗАЧ, (2.17)
где kЗ – коэффициент, учитывающий процент объема груза, попадающий в ковши зачерпыванием: для элеваторов с сомкнутыми ковшами – kЗ = 0,2…0,3; для элеваторов с расставленными ковшами – kЗ =1,0; gГР - линейная сила тяжести груза, Н; АЗАЧ – удельная работа, затрачиваемая на зачерпывание груза, Н×м/Н: для пылевидных и порошкообразных грузов – 1,2…1,5 Н×м/Н; для зернистых и мелкокусковых – 1,5…2,5 Н×м/Н; для среднекусковых – 2,5…3,0 Н×м/Н; для крупнокусковых – 3,0…4,0 Н×м/Н.
Сопротивление, затрачиваемое на гашение скорости падающего груза при его засыпании в ковши, для элеваторов с сомкнутыми ковшами, Н:
 (2.18)
(2.18)
где u 1 - скорость падающего в ковши груза; u 1 = 1 м/с.
Для элеваторов с расставленными ковшами сопротивление
WГР» 0.
Усилие в точке “ 2 ”, Н:
 , (2.19)
, (2.19)
где x - коэффициент сопротивления при огибании тяговым органом барабана (звездочки); x = 1,06…1,08.
Усилие в точке «3», Н:
Þ для ленточных элеваторов:
S 3 = S 2 + W 2/3 = S 0 + (qT + qК + qГР) НВ, (2.20)
Þ для цепных элеваторов с учетом динамических усилий в цепи:
S 3 = S 2 + W 2/3 = S 0 + (qT + qК + qГР) НВ + SДИН, (2.21)
где W 2/3 - сопротивление на участке «2-3», Н; qT, qК, qГР - линейные силы тяжести, соответственно, тягового органа, ковшей и груза, Н/м; НВ – высота подъема груза, м; SДИН - динамическое усилие, возникающее от неравномерного хода цепей, Н:
 , (2.22)
, (2.22)
где u - скорость тягового органа, м/с; z - число зубьев звездочки; tЦ - шаг цепи, м; g = 9,81 м/с2.
Усилие в точке «4» при отсчете против движения тягового органа, Н:
S4 = S 1 + W 1/4 = S 1 + (qT + qК) НВ, (2.23)
После выражения всех усилий в точках контура через величину S0, определяется значение минимального натяжения тягового органа S0 в нижней точке холостой ветви.
Для ленточных элеваторов величина S0 определяется из выражения, Н:
 , (2.24)
, (2.24)
где a - угол обхвата лентой приводного барабана, рад; a = p (1800); m - коэффициент трения между лентой и приводным барабаном; m = 0,10…0,35 (меньшие значения – для влажных условий).
Для цепных элеваторов величина S0, Н:
 . (2.25)
. (2.25)
Полученное из выражений 2.24, 2.25 численное значение S 0 увеличивается для обеспечения запаса по сцеплению (для ленточных) и по прочности (для цепных) на 40 – 80 %. После установления численного значения S 0 определяются численные значения усилий во всех точках расчетного контура и строится диаграмма натяжения тягового органа элеватора (см. рис. 2.2).
После выполнения тягового расчета и построения диаграммы натяжения производится проверка тягового органа на прочность:
Þ для ленточных элеваторов:
 , (2.26)
, (2.26)
где i - число прокладок ленты; ВЛ – ширина ленты, мм; Р – прочность ленты на разрыв, Н/мм (см. табл. 2.2).
Þ для цепных элеваторов:
 , (2.27)
, (2.27)
где z - число цепей; РРАЗ – разрушающая нагрузка, Н (табл. 2.3).
При невыполнении условий 2.26 или 2.27 следует скорректировать расчет: увеличить число прокладок ленты или задаться более прочной цепью.
Окружное усилие на ведущем элементе (барабане, звездочке), Н:
Þ для ленточных элеваторов
F 0 = x (S 3 – S 4 ). (2.28)
Þ для цепных элеваторов с учетом динамических усилий
F 0 = S 3 – S 4+ (S 3+ S 4 ) × (x -1 ) + SДИН . (2.29)
Мощность, затрачиваемая на перемещение тягового органа с грузом, Вт
NT =F 0× u. (2.30)
2.3. Кинематический расчет привода
Тип привода, его компановка и исполнение отдельных узлов определяются назначением элеватора, типом тягового органа, высотой подъема и возможностью размещения приводного оборудования. Расположение привода – в верхней части элеватора.
Для большинства элеваторов используются редукторные приводы с отдельно устанавливаемыми электродвигателем и передаточным механизмом. Для привода элеватора применяют асинхронные электродвигатели переменного тока серий 4А, АО с синхронной частотой вращения вала 750, 1000, 1500 об/мин. В качестве передаточного механизма используют двухступенчатые цилиндрические или коническо-цилиндрические редукторы. При высоких скоростях тягового органа могут быть использованы одноступенчатые цилиндрические или конические редукторы, при малых скоростях – червячные или планетарные редукторы.
При малой расчетной мощности (до 10 кВт) применяются мотор-редукторы горизонтального исполнения с опорными лапами или фланцевые. Для ленточных элеваторов может быть использован мотор-барабан, являющийся встроенным типом мотор-редуктора.
Для цепных элеваторов большой высоты применяют прямолинейные промежуточные приводы. Для элеваторов с круглозвенными цепями используют фрикционный привод и приводные блоки с ободом, имеющим гладкую фасонную выемку, или звездочки со вставными зубцами.
Вал приводного барабана или звездочки размещается в самоустанавливающихся подшипниках качения. Для соединения приводного вала и тихоходного вала редуктора используют зубчатые муфты (МЗ), для соединения вала электродвигателя и быстроходного вала редуктора – упругие втулочно-пальцевые муфты (МУВП), гидравлические муфты.
Общий к.п.д. привода элеватора:
 , (2.31)
, (2.31)
где hРЕД, hМ, hПОДШ - к.п.д. редуктора, муфты и подшипников; х – число муфт.
Требуемая мощность электродвигателя, кВт:
NТР = NТ / (103 hПР), (2.32)
где NТ - мощность, затрачиваемая на перемещение тягового органа с грузом, Вт.
Условие выбора электродвигателя:
NДВ ³ NТР, (2.33)
где NДВ - мощность электродвигателя (номинальная), кВт.
Передаточное отношение привода:
u ПР = nДВ / n, (2.34)
где n - частота вращения приводного вала барабана или звездочки, об/мин; nДВ - частота вращения вала принятого типоразмера электродвигателя, об/мин.
Типоразмер редуктора принимается по значению расчетного передаточного отношения привода (u ПР) с учетом передаваемой (подводимой) мощности (NП) при соответствующей синхронной частоте вращения быстроходного вала (двигателя) для непрерывного режима работы (ПВ 100%):
u РЕД » u ПР
NП ³ NДВ, (2.35)
где uРЕД - передаточное число принятого типоразмера редуктора.
При выборе типоразмера мотор-редуктора (мотор-барабана) частота вращения его тихоходного (выходного) вала (nТ) должна соответствовать расчетному значению частоты вращения приводного вала барабана или звездочки (n), а мощность электродвигателя должна быть больше требуемой по расчету (NТР) при соответствующей синхронной частоте быстроходного вала для непрерывного режима работы (ПВ 100%):
NДВ ³ NТР
nТ = n. (2.36)
Техническая характеристика выбранных типоразмеров двигателя, редуктора или мотор-редуктора должна быть представлена в табличномвиде (марки, мощность, передаточное отношение, частоты вращения, габаритные размеры, диаметры выходных концов валов, масса).
Фактическая скорость движения тягового органа, м/с:
UФАКТ = p×nДВ D / (60×uРЕД) = p×nТ D/ 60, (2.37)
где D - диаметр барабана (звездочки) м.
Выбор типоразмера муфты осуществляется по величине расчетного вращающего момента (Мpi), передаваемому муфтой, с учетом диаметров соединяемых валов (di, dj):
М нi ³ МР
DРАСТ Î (di; dj) (2.38)
где Мнi – номинальный передаваемый вращающий момент выбранного типоразмера муфты, кНм; dРАСТ - границы расточки под вал у выбранного типоразмера муфты, мм
Расчетный вращающий момент на соединяемых валах, кНм:
Мpi = 30 kЗ× NДВ ×h×i / (p×ni), (2.39)
где kЗ - коэффициент запаса, 1,2 … 1,3; ni - частота вращения соединяемых валов, об/мин; NДВ - кВт; h×i - общий к.п.д. деталей и узлов, расположенных между электродвигателем и устанавливаемой муфтой.
Масса привода, кг:
mПР = mДВ + mРЕД + mМУФ + … (2.40)
где mДВ , mРЕД, mМУФ - масса двигателя, редуктора (мотор-редуктора, мотор-барабана), муфт и др.сборочных единиц привода элеватора, кг.
2.4. Выбор предохранительного устройства
Для предотвращения самопроизвольного обратного движения тягового органа при остановке элеватора привод должен быть снабжен остановом или тормозом.
В большинстве элеваторов применяют бесшумные храповые или роликовые остановы, устанавливаемые на приводном валу или размещаемые в упругой муфте между электродвигателем и редуктором. В качестве тормозного устройства может быть использована гидромуфта.
В элеваторах тяжелого типа при большой величине мощности (свыше 10 кВт) применяют электромагнитные колодочные тормоза, устанавливаемые на валу электродвигателя.
Выбор типоразмера тормоза осуществляется по величине тормозного момента (МТ) с учетом размера тормозного шкива (DТМ) упругой втулочно-пальцевой (или иной) муфты:
МНТ ³ МТ
DТ = DТМ, (2.41)
где МНТ, DТ - номинальный тормозной момент (кНм) и диаметр тормозных колодок (мм) выбранного типоразмера тормоза.
Тормозной момент, кНм:
МТ = 30 kТ×NДВ / (p×nДВ), (2.42)
где kТ - коэффициент запаса торможения; kТ =1,5; NДВ, nДВ - мощность (кВт) и частота вращения вала (об/мин) электродвигателя.
2.5. Выбор натяжного устройства
Различают натяжные устройства дискретного (винтовые, пружинно-винтовые) и автоматического (грузовые, гидравлические) действия. Натяжное устройство размещается на валу натяжного барабана (звездочки) в опорной части элеватора и крепится к боковым стенкам «башмака». Для ленточных элеваторов натяжной барабан выполняется с решетчатым ободом для устранения налипания на него груза.
Выбор типа и типоразмера натяжного устройства определяется высотой подъема груза и типом тягового органа и привода. Элеваторы с круглозвенными цепями снабжают грузовым натяжным устройством.
Натяжное усилие для рабочего состояния, Н:
SH = (S3 + S4)/ h, (2.43)
где S3, S4 - усилие в набегающей и сбегающей ветвях элеватора, Н; h - к.п.д. механической передачи (канатной, винтовой).
Ход натяжного устройства, мм:
АН = 1000 е× НВ, (2.44)
где НВ – высота подъема груза, м; е – коэффициент пропорциональности; при НВ £ 50 м – е = 0,0010…0,0015; при НВ > 50 м – е = 0,0015…0,0020.
Осевое усилие на винт винтового натяжного устройства, Н:
sB = SH / zB, (2.45)
где zB - число параллельно работающих винтов (1 или 2).
Винт натяжного устройства проверяют на деформацию сжатия и кручения.
Масса груза грузового натяжного устройства, кг:
mГ = SH / g, (2.46)
где g =9,81 м/с2.
2.6. Конструирование корпуса элеватора и рамы привода
Корпус (кожух) элеватора является силовым каркасом, воспринимающим статические и динамические нагрузки.
Кожух элеватора выполняется секционным с высотой секций 2-2,5 м. Секции изготавливаются из листовой стали толщиной 2-4 мм с окантовкой металлическим уголком в продольном направлении и по торцевым сечениям. Соединение секций – болтовое с использованием упругих (эластичных) прокладок для герметизации стыков. Для направления движения ходовой части элеватора в средних секциях кожуха устанавливают направляющие устройства.
Для обслуживания и ремонта в боковых стенках верхней («головка») и нижней («башмак») частей элеватора должны быть предусмотрены люки с герметичными дверцами.
Размеры загрузочного устройства, располагаемого в «башмаке» элеватора, мм:
- вылет lЗ = (1,0…1,1) DH ü
- высота hЗ = lЗ × tga ý (2.47)
- ширина верхней части bВ = l0 ÷
- ширина нижней части bH = bK ø
где a - угол наклона днища загрузочного устройства к горизонту, зависящий от характера транспортируемого груза: для влажных плохо сыпучих грузов a = 600; для сухих хорошо сыпучих грузов a = 450; DН - диаметр натяжного барабана (звездочки), мм; bК – ширина ковша, мм; l0 - расстояние между опорами натяжного барабана (звездочки), мм.
Габаритные размеры элеватора, мм:
- длина L = D + 2 l + (180…200)
- ширина B = LБ + (150…200) (2.48)
- высота H = HB + D + (200…220)
где D - диаметр барабана (звездочки), мм; l - вылет ковша, мм; LБ - длина барабана, мм; bK – ширина ковша, мм; HB – высота подъема груза, мм.
После выполнения графической части габаритные размеры должны быть уточнены.
Конструктивная масса элеватора, кг:
М = [(qT + qK) × (2 НВ + pD)] / g +
+ (1,1…1,152(L+B)HdrСТ + mГ + (1,2…1,25)mПР, (2.49)
где g = 9,81 м/с2; qT, qK - линейные силы тяжести тягового органа и ковшей, Н/м; d - толщина стенок корпуса элеватора,м; rСТ - плотность стали, 7850 кг/м3.
Рама привода изготовляется сварной из профильного проката (уголок, тавр) и листового железа. Конструкция рамы должна обеспечивать правильное положение узлов привода в течение всего срока эксплуатации и удовлетворять требованиям прочности, жесткости и виброустойчивости. Рекомендации к конструированию рамы приведены в [12], геометрические характеристики профильного проката – [21].

